Изобретение относится к тяжелой промышленности, в частности к металлургии, а именно к оборудованию для транспортировки изделий в шаговом режиме при необходимости точной остановки конвейера, например, с прокатанными на стане рулонами.
Цель изобретения - повышение точности и надежности работы устройства.
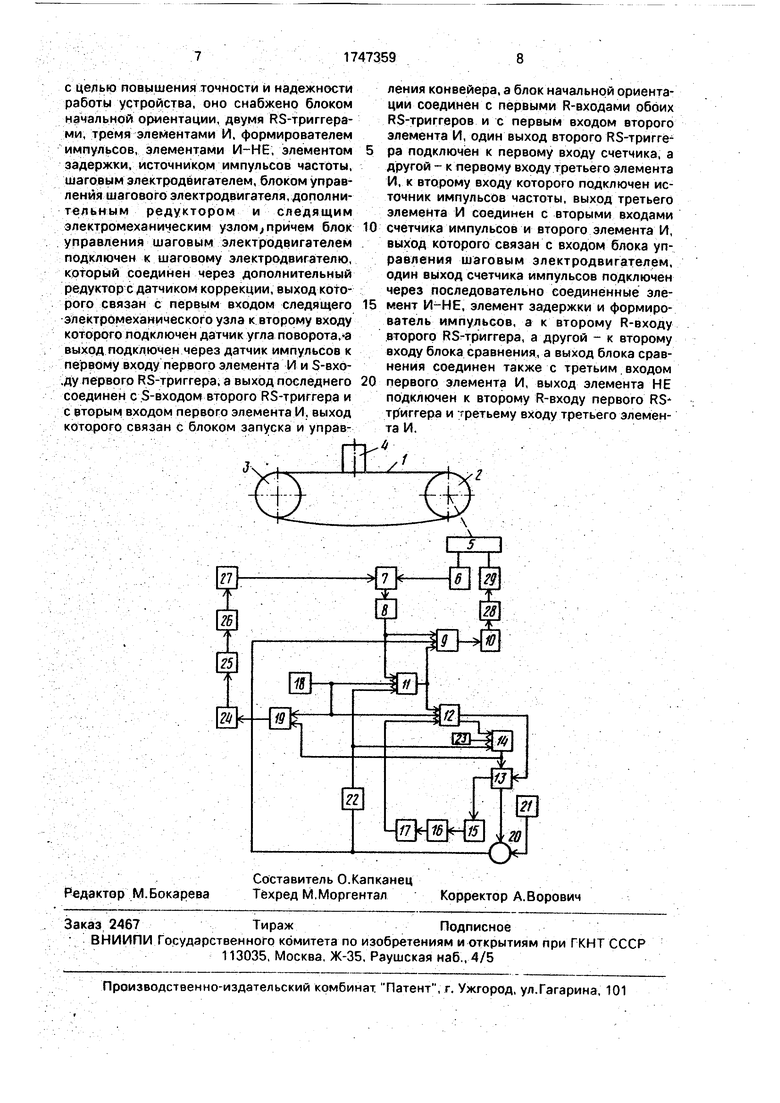
Сущность изобретения поясняется чертежом.
Устройство содержит тяговую цепь 1 конвейера, состоящую из отдельных звеньев и сочленяющих элементов. Тяговая цепь 1 перемещается с помощью ведущей 2 и ведомой 3 звездочек. На тяговой цепи установлен транспортируемый груз 4. С редуктором 5 ведущей звездочки 2 соединен датчик 6 угла поворота.
Датчик 6 угла поворота ведущей звездочки 2 конвейера, в частности им может быть бесконтактный сельсин, запитывае- мый переменным напряжением, соединен с следящим электромеханическим узлом 7, на валу которого установлен датчик 8 импульсов. Он может состоять из диска с прорезью и бесконтактного путевого выключателя. Выход датчика 8 импульсов соединен с первым входом элемента И 9, осуществляющим функцию логического совпадения по трем входам и обеспечивающим по выходу связь с блоком 10 запуска и управления конвейером. Выход датчика 8 импульсов соединен также с S-входом RS-триггера 11. Назначением RS-триггера 11 является подтвержде- ние остановки конвейера и выдачи разрешения на его пуск, а также управление RS-триггером 12, RS-триггер 11 исключает влияние дребезга датчика 8 импульсов на величину вводимой коррекции на шаг. Соответственно выход RS-триггера 11 соединен со вторым входом элемента 9 и S-входом RS-триггера 12. RS-триггер 12 соединен и управляет первым входом (сбросом) счетчика импульсов, а вторым соединен со входом элемента И 14,
Счетчик 13 импульсов соединен первым выходом с элементом 14-ГН 15. Счетчик 13 импульсов осуществляет счет импульсов коррекции шага конвейера; т. е. расстояния, на которое должны перемещаться за одно включение транспортируемые конвейерам предметы.
Элемент И-НЕ фиксирует тот факт, что счетчик 13 импульсов установлен в ноль и по связи через PC-элемент 16 задержки и формирователь 17 импульсов соединен со вторым R-входом RS-триггера 12. Элемент
16задержки за счет RC цепи обеспечивает необходимое запаздывание выходного сигнала элемента И-НЕ 15 для устойчивого сброса счетчика 13 в ноль, а формирователь
17импульсов обеспечивает необходимую крутизну фронта импульсов для четкой работы RS-триггера 12. Первые R-входы триггеров 11 и 12 соединены с блоком 18 начальной ориентации, который представляет собой, в частности, элемент выдержки, времени срабатывающий при включении питания устройства и обеспечивающий по своей связи по выходу с RS-триггерами 11, 12 установку их в исходное положение, связью с элементом И 19 запрещает прохождение импульсов коррекции шага конвейера через элемент И 19. Выдержка времени блока 18 начальной ориентации должна превышать время, необходимое для
заполнения счетчика 13 импульсов до его предельной емкости. Эта емкость определяется предельно возможной величиной коррекции шага и необходимой разрешающей способностью устройства. Второй выход
счетчика 13 импульсов связан с первым входом блока 20 сравнения,который представляет набор элементов И поразрядного сравнения числа импульсов, находящихся в счетчике 13 импульсов, с числом импульсов,
заданных блоком 21 задания величины коррекции. Выход блока 20 сравнения связан с третьим входом элемента И 9 и со входом элемента Ht 22, выход которого связан со вторым R-входом RS-триггера 11 и третьим
входом элемента И 14. Второй вход элемента И 14 связан с источником 23 импульсов частоты f. Выход элемента И 14 связан со вторым (счетным) входом счетчика импульсов и вторым входом элемента И 19. Выход
элемента И 19 связан с блоком 24 управления шаговым электродвигателем 25. Блок 24 управления шаговым двигателем представляет собой кольцевой коммутатор, переключающий обмотки шагового электродвигателя 25 в необходимой последовательности, обеспечивая его поворот и через дополнительный редуктор 26, связывающий валы электродвигателя 25 и датчика 27 коррекции, Блок 10 запуска и управления приводом конвейера связан с силовым преобразователем 28, обеспечивающим управление электродвигателем 29, привода конвейера 1 через редуктор 5.
Стабилизация шага перемещения тяговой цепи достигается тем, что заданная величина шага конвейера определяется, как алгебраическая сумма углов поворота датчика угла поворота ведущей звездочки конвейера и датчика коррекции, которая в
сумме должна быть равна одному обороту (одна прорезь на диске датчика импульсов), либо n-й части оборота (n-прорезей на диске при применении бесконтактного конечного выключателя и диска датчика импульсов).
Для тяговых цепей, не нуждающихся в коррекции шага, угол поворота датчика угла поборота ведущей звездочки равен 360/п {п - целое число).
Если необходима коррекция шага по величину Д1, то необходимый угол поворота датчика угла поворота ведущей звездочки будет равен
а-360. Um
а п ГТГЗТ (1)
где Lo - необходимая величина шага.
Количество импульсов К, необходимое для коррекции в этом случае, равно
(
360
а) I
(2)
где д - угол поворота шагового двигателя за один импульс;
i - передаточное число редуктора, связывающего шаговой двигатель с датчиком коррекции.
Так как величина д может быть весьма малой (порядка нескольких градусов или минут), а величина передаточного числа редуктора шагового двигателя достаточно большой (несколько десятков), то точность устройства может быть весьма высокой.
Устройство работает следующим образом.
До начала работы устройства при его наладке согласуется односторонность направления вращения следящего электромеханического узла 7 от датчика 6 угла поворота ведущей звездочки 2 при движении конвейера в рабочем направлении, и вращение датчика 27 коррекции от шагового двигателя 25 при подаче от блока 21 задания величины коррекции произвольного, но достаточно большого количества импульсов на блок 20 сравнения
Вращая вал шагового двигателя 25 вручную, устанавливаем исходное положение датчика 8 импульсов, в частности, таким образом, чтобы прорезь диска вошла в щель бесконтактного путевого выключателя датчика 8.
При нулевом корректирующем задании с блока 21 задания величины коррекции определяется действительная величина шага конвейера 1.
По измеренному с помощью линейного измерителя длины отклонению Д1 действительного шага конвейера 1 от необходимого определяют требуемое число импульсов коррекции по формуле (2) и вводят эту величину в блок 21 задания величины коррекции.
После этого устройство готово к нормальной работе и работает следующим образом.
Оператор, либо автоматическое приемное устройство, запускает конвейер 1 с помощью блока 10 запуска и управления приводом. При этом следящий электромеханический узел поворачивается вслед за датчиком 6 угла поворота. Когда датчик 8 импульсов срабатывает (фиксирует прорезь диска в щели бесконтактного путевого выключателя), элемент И 9 отключает электродвигатель 29 привода конвейера 1 и одновременно переключается нулевым сигналом датчика импульсов RS-триггер 11, который переключает RS-триггер 12, выдавая сигнал, осуществляющий сброс счетчика 13 импульсов в ноль. Элемент И-НЕ 15 при этом через элемент задержки 16 и формирователь 17 импульсов возвращает RS- триггер 12 в исходное состояние, разрешая
0 прохождение импульсов частоты f через элемент И 14 на счетчик 13 импульсов с одновременной их передачей на блок 24 управления шаговым двигателем через элемент И 19. При этом шаговый двигатель 25
5 начнет поворачивать датчик 27 коррекции через редуктор 26. При этом следящий электромеханический узел 7 отслеживает как угол поворота датчика 27 коррекции, так и угол поворота датчика 6 ведущей звездочки
0 2 при торможении конвейера 1. Когда количество импульсов, воспринятое счетчиком 13, сравнивается с числом импульсов, введенных блоком 21 задания величины коррекции, блок 20 сравнения через элемент
5 НЕ 22 запретит прохождение импульсов через элемент И 14 на счетчик 13 импульсов и элемент И 19 и последний перестает выдавать импульсы на вращение шагового двигателя 25. Одновременно с выхода элемента
0 НЕ 22 поступает импульс на R-вход RS-триг- гера 11 и еернет его в исходное положение. При °том RS-триггер 11 и выход блока 2 1 сравнения выдают сигналы нз элемент И 9, подготовив при чтом устройство для следу5 ющего шага
Достоинством устройства является со- (ранение информации о шаге конвейера в случае нарушения электроснабжения при включенном конвейере. Максимальная
0 ошибка при этом равна величине коррекции на 1 шаг если электроснабжение нарушилось в момент ее отработки датчиком 27 коррекции. Вероятность этого события очень мала, так как время ввода коррекции
5 составляет малую долю от времени цикла работы конвейера.
Формула изобретения Устройство для управления шаговым режимом работы конвейера, содержащее
0 блок запуска и управления конвейером, который через силовой преобразователь соединен с электродвигателем, подключенным через редуктор к валу ведущей звездочки конвейера, датчик угла поворота, соединен5 ный с выходным валом редуктора, датчик коррекции, датчик импульсов, счетчик импульсов, блок задания величины коррекции, подключенный к первому входу блока сравнения, выход которого соединен с входом элемента НЕ, отличающееся тем. что,
с целью повышения точности и надежности работы устройства, оно снабжено блоком начальной ориентации, двумя RS-триггера- ми, тремя элементами И. формирователем импульсов, элементами И-НЕ, элементом задержки, источником импульсов частоты, шаговым электродвигателем, блоком управления шагового электродвигателя, дополни- тельным редуктором и следящим электромеханическим узлом,,причем блок управления шаговым электродвигателем подключен к шаговому электродвигателю, который соединен через дополнительный редуктор с датчиком коррекции, выход которого связан с первым входом следящего электромеханического узла к второму входу которого подключен датчик угла поворота,-а выход подключен через датчик импульсов к первому входу первого элемента И и S-вхо- .ду первого RS-триггера, а выход последнего соединен с S-входом второго RS-триггера и с вторым входом первого элемента И, выход которого связан с блоком запуска и управления конвейера, а блок начальной ориентации соединен с первыми R-входами обоих RS-триггеров и с первым входом второго элемента И, один выход второго RS-триггера подключен к первому входу счетчика, а другой - к первому входу третьего элемента И, к второму входу которого подключен источник импульсов частоты, выход третьего элемента И соединен с вторыми входами
0 счетчика импульсов и второго элемента И, выход которого связан с входом блока управления шаговым электродвигателем, один выход счетчика импульсов подключен через последовательно соединенные эле5 мент И-НЕ, элемент задержки и формирователь импульсов, а к второму R-входу второго RS-триггера, а другой - к второму входу блока сравнения, а выход блока сравнения соединен также с третьим входом
0 первого элемента И, выход элемента НЕ подключен к второму R-входу первого RS триггера и третьему входу третьего элемента И. .U 1
2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации шага конвейера | 1988 |
|
SU1738739A1 |
| Устройство для управления шаговым режимом работы конвейера | 1981 |
|
SU956382A1 |
| Устройство для управления тяжелонагруженным цепным конвейером | 1979 |
|
SU872401A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СОРТИРОВКОЙ КРУГЛОГО ЛЕСА | 2023 |
|
RU2795741C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1972 |
|
SU323295A1 |
| Станок для автоматического фрезерования коллекторов электрических машин | 1981 |
|
SU991538A1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ СЛЕДЯЩИЙ ПРИВОД ЗАТВОРОВ | 1970 |
|
SU276210A1 |
| Устройство управления механизмом раскладки намоточного станка | 1982 |
|
SU1095254A1 |
| ШАГОВЫЙ ПРИВОД | 1970 |
|
SU258464A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
Изобретение относится к металлургической пром-сти и предназначено для транспортировки изделий в шаговом режиме при необходимости точной остановки конвейера с прокатанными на стане рулонами. Цель - повышение точности и надежности работы устройства. Уст-во содержит блок 10 запуска и управления конвейером, соединенный через силовой преобразователь 28 с подключенным через редуктор 5 к валу ведущей звездочки 2 К электродвигателем (ЭД) 29. С входным валом редуктора 5 соединен датчик (Д) 6 угла поворота, соединенный со следящим электромеханическим узлом 7. На валу узла 7 установлен Д 8 импульсов. ГревГ. Н. ШАЕРА гичерансе при вейе Цель боты запунный подущей 29. С датй со м 7. ьсов. При срабатывании Д 8 элемент И 9 отключает ЭД 29 и одновременно соединенный с Д 8 RS-триггер 11 переключает RS-триггер 12, осуществляя сброс счетчика импульсов (СИ) 13 в ноль. При этом элемент И-НЕ 15, подключенный к выходу СИ 13 через элемент задержки 16 и формирователь 17 импульсов, возвращает RS-триггер 12 в исходное состояние, разрешая прохождение импульсов через элемент И 14 на СИ 13с одновременной их подачей на блок 24 управления 24 шаговым ЭД 25 через элемент И 19. При этом ЭД 25 поворачивает соединенным с ним Д 27 коррекции через редуктор 26. Узел 27 отслеживает углы поворота Д 27 и 6. При равенстве количества импульсов СИ 13 в блоке 21 задания величины коррекции блок 20 сравнения через элемент НЕ 22 запретит прохождение импульсов через элемент прохождения импульсов через элемент И 14 на СИ 13 и элемент И 19 и последний перестанет выдавать импульсы на вращение ЭД 25. При этом RS-триггер 11 вернется в исходное положение. Время для заполнения СИ 13 до его предельной емкости определяется выдержкой времени блока 18 начальной ориентации, подключенным ко входам RS-триггеров 11 и 12 и элемента И 19. Элемент И 14 запитывается от источника 23 импульсов частоты. 1 ил. VI Ь VI со ел о
| Устройство для шаговых перемещений плоских изделий | 1980 |
|
SU939349A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления шаговым режимом работы конвейера | 1981 |
|
SU956382A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
