Изобретение относится к области экспериментального оборудования и может быть использовано при испытаниях несущих винтов вертолетов. Известное устройство, состоящее из потенциометрического датчика, установленного на вращающейся втулке винта, и индикатора, соединенного через блок аналитических вычислителей, ячеек памяти, импульса отметчика азимута и диодной мостовой схемы, сложно и ненадежно в работе ввиду того, что сигналы от датчика махового движения и от импульсного отметчика азимута передаются через токосъемники, которые из-за быстрого их износа часто отказывают в работе.
Целью настоящего изобретения является создание устройства для определения коэффициентов махового движения лопастей несущего винта, которое было бы безотказным в работе и простым по конструкции.
Достигается это тем, что предлагаемое устройство имеет универсальный шарнир с подшипником и ступицей, смонтированный подвижно соосно валу на направляющей, соединенной с датчиком нулевой гармоники, и шарнирные поводки, соединяющие элементы втулки несущего винта с наружным кольцом подшипника, при этом внутреннее кольцо подшипника соединено с датчиками первой гармоники, установленными на ступице универсального шарнира, которая соединена с датчиками нулевой гармоники.
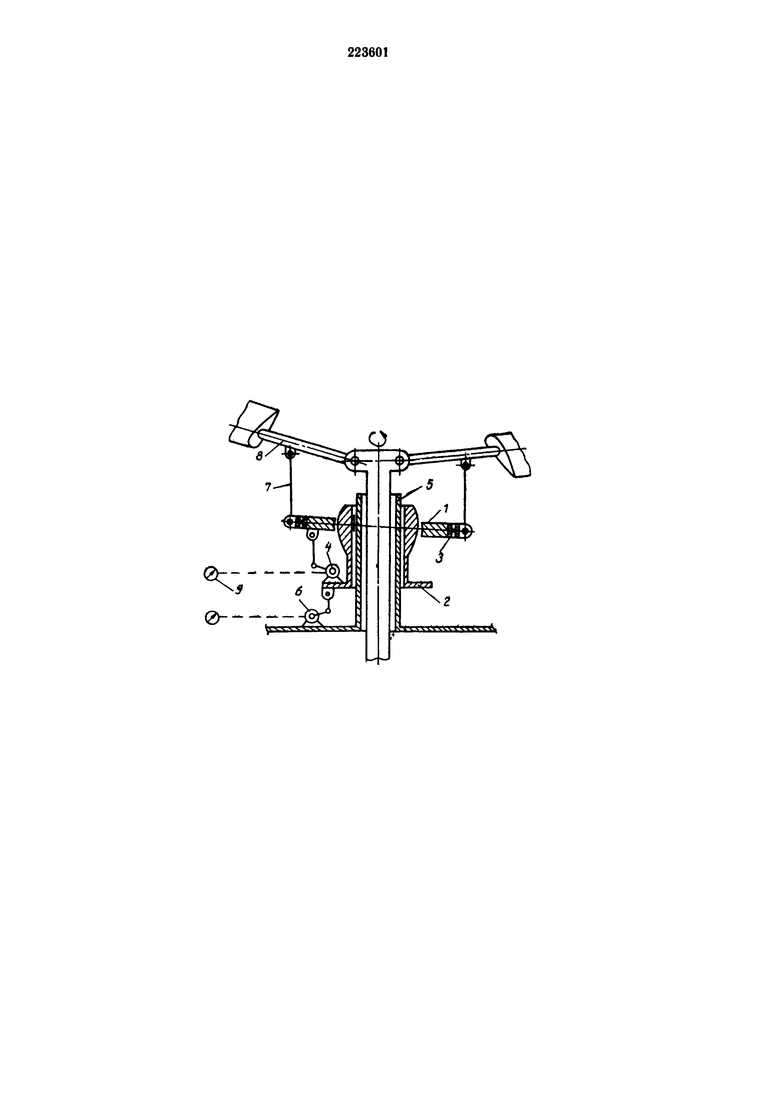
На чертеже изображена схема описываемого устройства.
Оно состоит из универсального шарнира 1 со ступицей 2, подшипника 3, укрепленного на шарнире 1, датчиков 4 первой гармоники, смонтированных на ступице 2 и соединенных с внутренним кольцом подшипника 3, направляющей 5, по которой соосно валу винта перемещается ступица 2, датчика 6 нулевой гармоники, укрепленного на корпусе вертолета и соединенного со ступицей 2, шарнирных поводков 7, соединяющих внешнее кольцо подшипника 3 с промежуточными элементами втулки несущего винта 8, и индикаторов 9, электрически связанных с датчиками 4 и 6.
При отсутствии угла взмаха лопастей промежуточные элементы несущего винта вращаются в плоскости, перпендикулярной оси вала, и в этом случае плоскость подшипника 3 будет также располагаться перпендикулярно оси вала. При этом сигналы датчиков 4 и 6, поступающие на индикаторы 9, будут соответствовать нулевым значениям коэффициентов махового движения лопастей.
При наличии угла взмаха, например в режиме висения вертолета, промежуточные элементы несущего винта 8 через поводки 7 и подшипник 3 вызовут поступательное перемещение универсального шарнира 1 со ступицей 2 вдоль направляющей 5, а так как ступица 2 шарнирно соединена с датчиком 6, то в нем возникнет сигнал, пропорциональный коэффициенту. При этом датчики 4 не изменят своих сигналов, так как плоскость подшипника 3 останется перпендикулярной оси вала несущего винта.
При наличии завала конуса, ометаемого лопастями в продольной и поперечной плоскостях, плоскость подшипника 3 под действием поводков 7 займет новое положение, наклонное к оси вала несущего винта. В этом случае в датчиках 4, расположенных на ступице 2 в продольной и поперечной плоскостях вертолета, проходящих через ось несущего винта, и шарнирно соединенных с внутренним кольцом подшипника 3, возникнут сигналы, пропорциональные коэффициентам махового движения лопастей, которые поступят на индикаторы 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| Втулка несущего винта | 2023 |
|
RU2798585C1 |
| УНИВЕРСАЛЬНЫЙ ШАРНИР ПОСТОЯННОЙ СКОРОСТИ ДЛЯ ВИНТА ВЕРТОЛЕТА | 2012 |
|
RU2607717C2 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| ВТУЛКА ВИНТА ВЕРТОЛЕТА | 2016 |
|
RU2636233C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА Е.С.ВАЖИНСКОГО | 2012 |
|
RU2490172C1 |
| ВОЗДУШНЫЙ ВИНТ | 2014 |
|
RU2544442C1 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2015 |
|
RU2616771C2 |
Устройство для определения коэффициентов махового движения лопастей несущего винта вертолета, содержащее датчики нулевой, первой гармоники и индикаторы, соединенные между собой электрически, отличающееся тем, что, с целью повышения надежности работы и упрощения конструкции, оно снабжено универсальным шарниром с подшипником и ступицей, смонтированным подвижно соосно валу на направляющей, соединенной с датчиком нулевой гармоники, и шарнирными поводками, соединяющими элементы втулки несущего винта с внешним кольцом подшипника, при этом внутреннее кольцо подшипника соединено с датчиками первой гармоники, установленными на ступице универсального шарнира, которая соединена с датчиками нулевой гармоники.
