Известны устройства для управления передвижением груза на разветвленных конвейерах с жесткой связью тягового органа и груза, содержащие следящую матрицу, распределитель, дешифратор, ключевой коммутатор и датчики груза.
Предложенное устройство отличается от известных тем, что состоит из отдельных аналогичных блоков управления по числу участков конвейера, связанных между собой через ячейки оперативной памяти, которые подключаются на входы блоков посредством ключевого коммутатора, управляемого дешифратором и наличием дополнительного датчика груза на выходе контролируемого участка.
Эти отличия придают большую гибкость и универсальность устройству управления за счет возможности сохранения информации при переходе груза на другой конвейер, изменения пункта назначения с различных мест и обеспечения повторного прохождения груза по замкнутому маршруту.
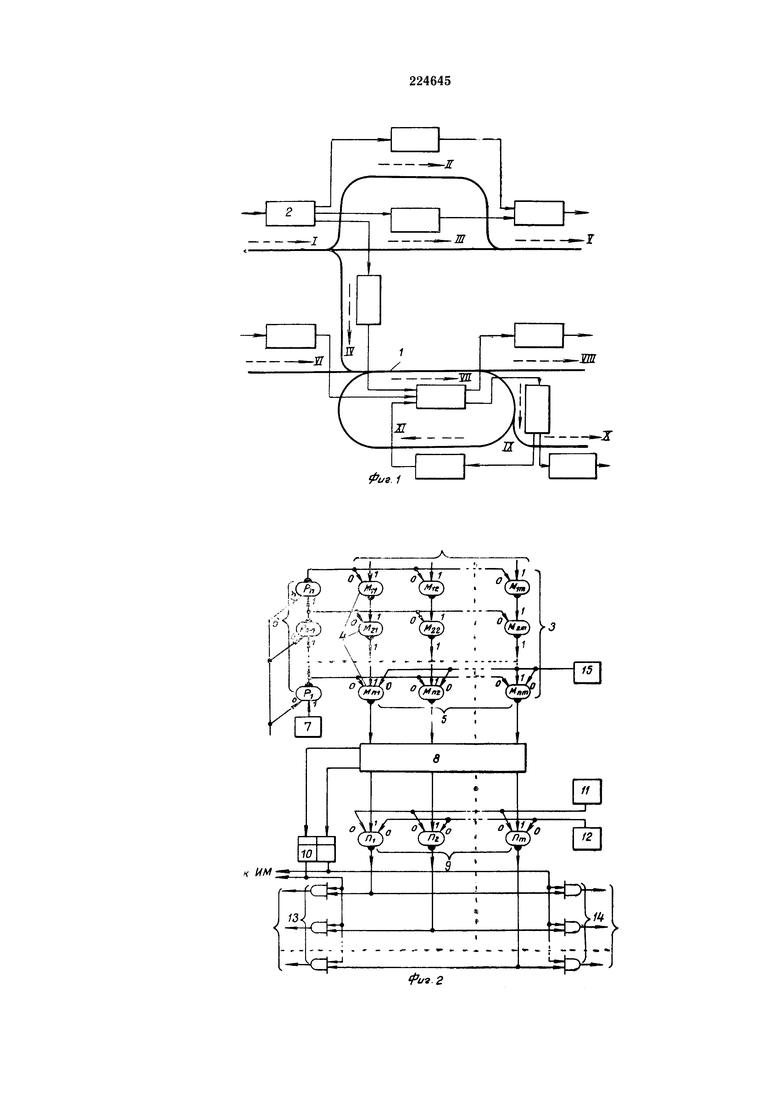
На фиг. 1 приведена схема трассы части произвольной транспортной установки и блок-схема устройства управления перемещением грузов; на фиг. 2 - функциональная схема одного из управляющих блоков.
Отдельные отрезки трассы 1 (на фиг. 1 они обозначены римскими цифрами, расположенными рядом с пунктирными стрелками, указывающими направление движения) выбираются так, что на них не может измениться порядок следования или пункт назначения груза.
Предлагаемое устройство состоит из отдельных аналогичных управляющих блоков 2. Устройство обеспечивает управление объектами при любой разветвленности и конфигурации транспортной установки (единственным ограничительным условием является жесткая связь между перемещением тягового органа и груза).
Основу блока составляет следяще-запоминающая матрица 3, состоящая из параллельных сдвигающих регистров 4, выполненных, например, на феррит-транзисторных элементах М11, …, М22, …, Мnm (первая из двухзначных цифр указывает порядковый номер элемента регистра, а вторая - номер регистра). Элементы всех регистров с одинаковым порядковым номером образуют строки 5. Каждая строка может принимать и запоминать информацию о пункте назначения груза (грузовой тележки) и передавать хранящуюся информацию в последующую строку по команде распределителя. На входную строку матрицы информация поступает от оперативной памяти предыдущего управляющего блока.
Распределитель 6 также выполнен на феррит-транзисторных элементах P1…, Pn-1, … Рn, на которые подано постоянное подмагничивание, считывающее информацию. С выхода одного элемента на вход следующего подается записывающий сигнал, а на входы соответствующей строки матрицы - считывающий сигнал. На записывающий вход элемента P1 подается сигнал от датчика 7 продвигающих импульсов. Последний связан с тяговым органом и вырабатывает импульс всякий раз, когда тяговый орган (а с ним и груз) проходит определенное расстояние. Рационально принимать это расстояние, равное минимально возможному шагу между грузами (грузовыми тележками). Поступивший на вход распределителя импульс начинает продвигаться вдоль него, считывая при этом последовательно во времени информацию с выходной строки матрицы, потом - со второй от выхода и т.д. Таким образом, вся информация о грузах, находящихся на данном участке, сдвигается на шаг вперед.
С входной строки матрицы информация поступает транзитом через дешифратор 8 в строку оперативной памяти 9. Дешифратор 8 может быть выполнен различным образом, например, на основе схемы И, построенной на феррит-транзисторных элементах. В зависимости от конечного пункта назначения груза дешифратор выдает команду на переключение ключевого коммутатора 10.
Ключевой коммутатор 10 может быть выполнен на основе триггера (если возможно более двух дальнейших направлений движения груза, то коммутатор может включать в себя несколько триггеров и схемы типа И). С выхода дешифратора подается команда на включение исполнительного механизма ИМ, например стрелки.
Оперативная память 9 может быть выполнена на феррит-транзисторных элементах n1, n2, …, nm, число которых равно числу регистров в матрице.
С выхода оперативной памяти под воздействием считывающих импульсов, поступающих от датчиков входа груза 11 или 12 того последующего участка транспортной установки, куда поступит груз, информация подается на элементы 13 и 14, реализующие функцию коньюнкции. На второй вход последних подается сигнал от ключевого коммутатора 10. Поэтому в зависимости от положения коммутатора (от направления дальнейшего движения груза) выходной сигнал будет только на элементах 13 или 14, который и поступает на вход соответствующего аналогичного блока, обслуживающего последующий участок трассы.
Сигнал в дешифратор 8, а значит через ключевой коммутатор и на исполнительный механизм, подается под воздействием продвигающих импульсов датчика 7, который лишь дискретно следит за положением тягового органа и связанного с ним груза. Для коррекции расстояния между грузом и исполнительным механизмом в момент подачи команды управления на последний применен дополнительный датчик 15 выхода груза с данного участка, считывающий информацию только с выходной строки матрицы. Вся аппаратура предлагаемого устройства за исключением датчиков может быть размещена вне транспортной установки, что позволяет с точки зрения аппаратуры управления разрешать работу отдельных участков установки практически в любых условиях.
Предлагаемое устройство может применяться для управления перемещением груза на транспортных установках любой разветвленности, в том числе имеющих несколько не связанных между собой тяговых органов, если на каждом отрезке пути соблюдается условие соответствия между перемещением тягового органа и груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования подвижных объектов | 1977 |
|
SU676987A2 |
| УСТРОЙСТВО для АДРЕСОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ ПОДЪЕМНО-ТРАНСПОРТНЫХ И ШАХТНЫХ УСТАНОВОК | 1970 |
|
SU270348A1 |
| Устройство для адресования грузов установок непрерывного транспорта | 1978 |
|
SU716934A1 |
| УСТРОЙСТВО для АДРЕСОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1973 |
|
SU365715A1 |
| СПЕЦИАЛИЗИРОВАННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОТРАНСПОРТНЫМИ РАБОТАМИ | 1973 |
|
SU368612A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Коммутатор | 1961 |
|
SU146098A1 |
| Устройство для учета грузов | 1977 |
|
SU714452A1 |
| Устройство для централизованного контроля и оперативного управления | 1977 |
|
SU633029A1 |
| Устройство для вывода графической информации | 1989 |
|
SU1644208A1 |
Устройство для управления передвижением груза на разветвленных конвейерах с жесткой связью тягового органа и груза, содержащее датчики груза и блоки управления, по числу участков конвейера, с параллельно сдвигающими регистрами, распределителями, дешифраторами и ключевыми коммутаторами, отличающееся тем, что, с целью повышения надежности работы устройства и расширения его функциональных возможностей, блоки управления соединены между собой через ячейки оперативной памяти и ключи, управляемые дешифраторами, а датчики грузов, установленные на выходах контролируемых участков, соединены с выходами сдвигающих регистров.
