Пзвестны механизмы доворота вращающ 1хся валов, например шпинделей станков.
Предложенный механизм доворота позволяет сменить ириводной ремень без демонтажа механизма и является более ко мпактным.
Достигается это те.м, что иоводкозый валик, передающий вращение щпинделю от силового оргаиа, выполнен перемещаемым в осввол направлении и фиксируемым в рабочем положении с помощью установочного винта. Кроме того, зубчатая рейка, связывающая силовой орган с поводковым валиком, установлена параллельно силовому органу и соединена с его иеремещающичмся элементом.
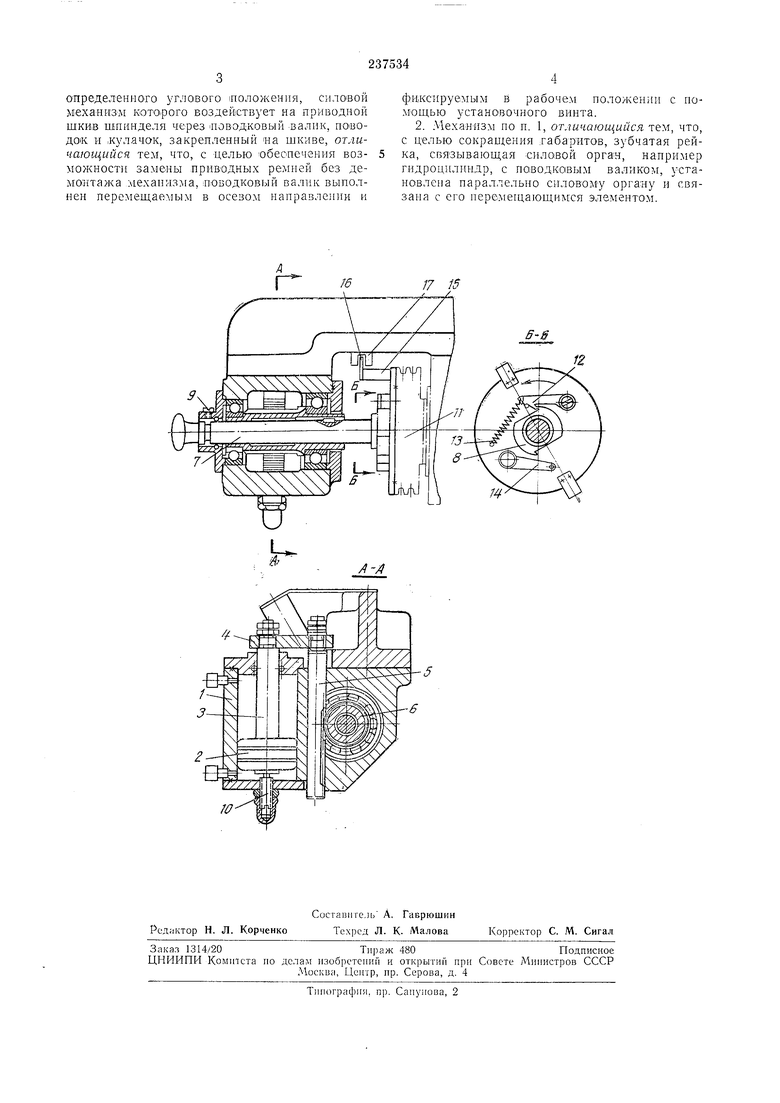
На чертеже иоказан предложенный механизм.
В корпусе 1 расположен порщень 2 со щтоком 3, который посредством планки 4 связан с зубчатой рейкой 5, находяи1,ейся в зацеплеН;ии с зубчаты.м колесом 6, смонтированным в корпусе /. Внутри колеса 6 находится поводковый валик 7 с поводком 8. Валик 7 зафиксирован в рабочем положении винтом 9. Перемещение порщпя 2 ограничено регулируе}, упором 10. Па торце приводного шкива 11 размещены качающийся на оси кулачок 12 с пружиной 13 и балансир 14. Там же на подставке 15 закреплена пластина 16, взаимодействующая с индуктивным датчиком 17.
При вращении вала со пгкивом // иентробежная сила, пресдолевая сопротивление пруж1П ы 13, отводит зуб кулач1ка 12 от поводка 8. По окончании вращеиия пружина 13 поворачивает кулачок 12 до соприкосновения с поверхностью поводка. Затем-масло от гидросистс ы станка ислтадает в штоковую полость гидроцилиндр;, перемещая поршень 2 со штоком 3 и рейкой 5 л передавая, таким образом, врашение шкиву // через зубчатое колесо 6, поводковый валик 7 и поводок 8, зуб которого взаимодействует с зубом кулачка 12. Конечное положение поводка 8 и шкива // регулируется упором 10.
В конце донорста пластина 16 попадает в пространство между полюсами индуктивного датчика 17, котор1з1Й подает сигнал об окончании процесса доворота. Для замены приводных ремней без демонтажа мехаипзма достаточно устаповигь доворачиваемый вал в такое положение, чтобы пластина 16 находилась вне датчика 17 и, отпустив винт 9, переместнть поводковьп 7 влево.
П р е д с т изобретен и я
Определенно-го угло,вого положения, силовой механнЗМ которого воздействует на приводной шкив шпинделя через 1поводковый -валик, поводок и ,кулачок, закрепленный иа шкиве, отличающийся тем, что, с целью обеспечения возможноети замены приводных ремней без демоитажа механизма, поводковый валик выполнен перемеш,аемым в осевом направлении и
фикеируемым в рабочем положении с помошью установочного впнта.
2. Механизм но п. 1, отличающийся те, что, с целью сокращения .габаритов, зубчатая рейка, связываюш,ая силовой орга-н, например гидроцилиндр, с паводковым валиком, установлена параллельно силовому органу п связана с его иеремещаюшнмся элементом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДОВОРОТА | 1972 |
|
SU330934A1 |
| РАСПРЕДЕЛЕНИЕ КАПЕЛЬ СТЕКЛОМАССЫ | 2007 |
|
RU2434815C2 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
| ТОКАРНЫЙ СТАНОК | 1995 |
|
RU2087263C1 |
| Устройство для автоматической подналадки резца | 1974 |
|
SU516471A1 |
| Станок для притирки резьбовых колец | 1944 |
|
SU67410A1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Переносной станок для обработки фланцев | 1982 |
|
SU1076196A1 |
| Двухкулачковый поворотный самоцентрирующий патрон | 1982 |
|
SU1013123A1 |
| ПЕРЕНОСНАЯ СВЕРЛИЛЬНАЯ ГОЛОВКА | 1990 |
|
SU1792014A1 |
/7 fff
B-S
12
