Известен швейный полуавтомат для выполнения незамкнутых строчек, например, на деталях и узлах обуви, состоящий из швейной машины; кассеты для фиксирования детали; механизма перемеш,ения кассеты относительно иглы, состоящего из устройства для вращения кассеты относительно иглы швейной машины и устройства для перемещения кассеты вдоль строчки, программного механизма и механизма привода.
Предлагаемый полуавтомат позволяет повысить производительность и точность работы.
Достигается это тем, что программный механизм состоит из устройства для считывания программы, записанной на перфоленте, лентопротяжного механизма, следящего приспособления и суммирующего устройства, кинематически связанного с устройством для вращения кассеты.
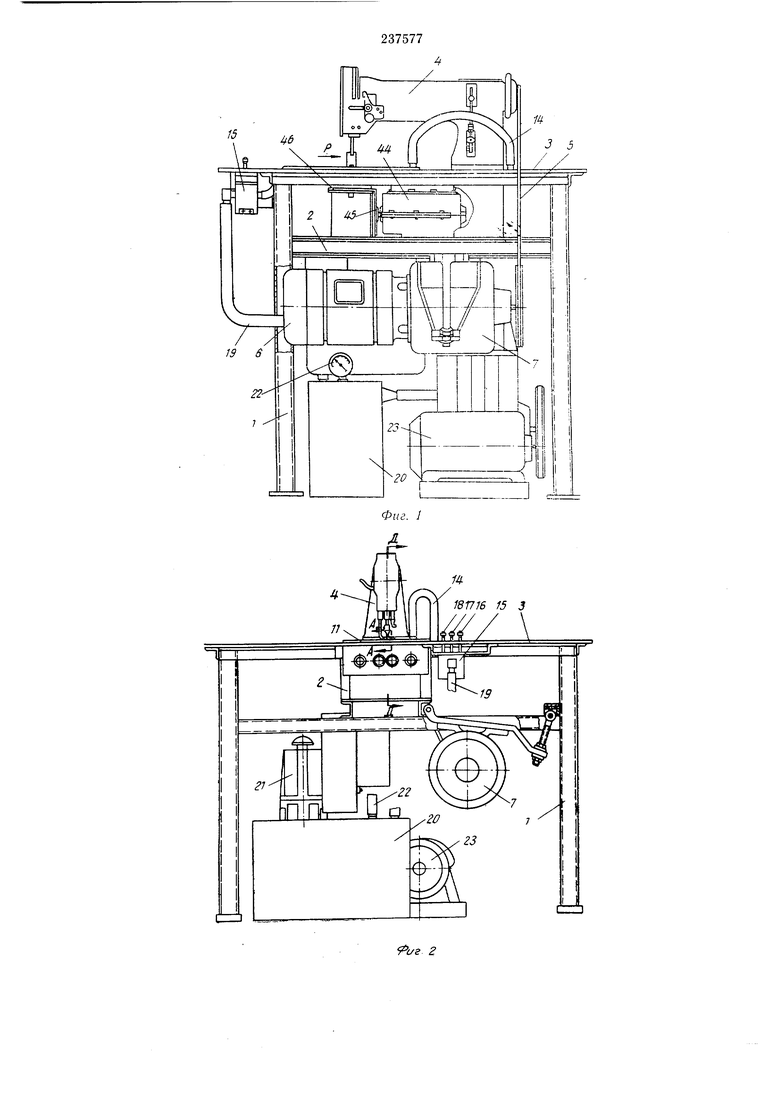
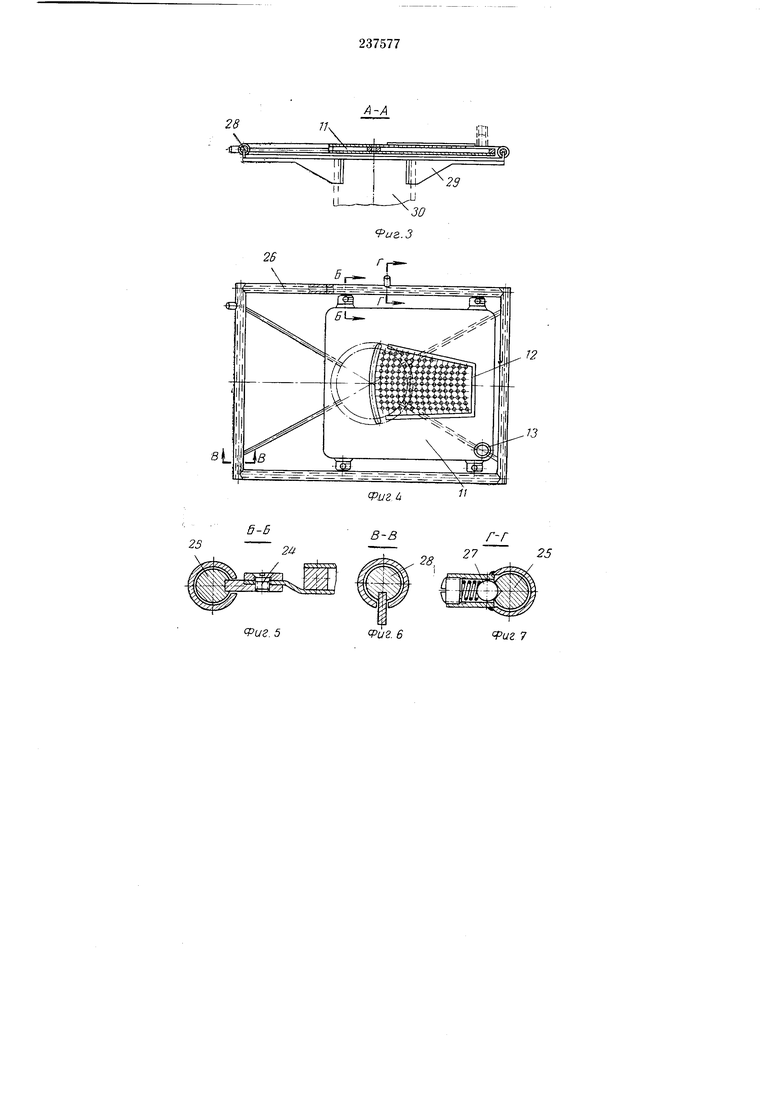
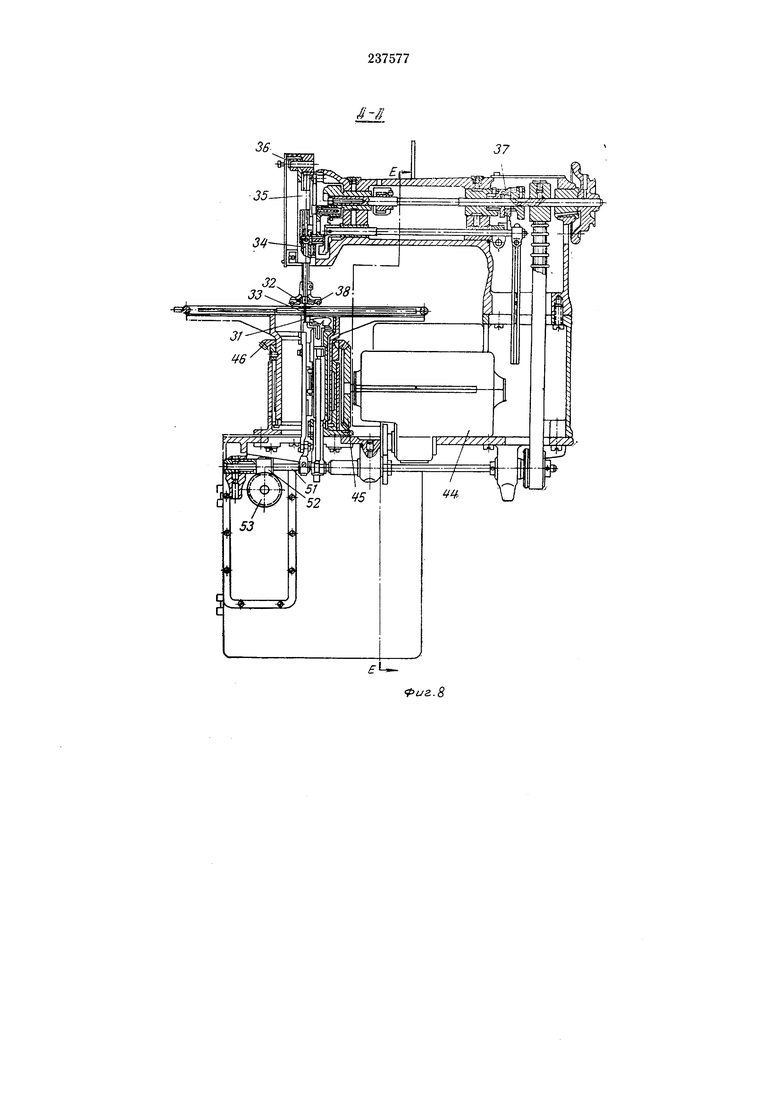
На фиг. 1 представлен предложенный полуавтомат, вид спереди; на фиг. 2-то же, вид слева; на фиг. 3-разрез по А-А на фиг. 2 устройства для закрепления деталей; на фиг. 4-вид сверху на устройство для закрепления деталей; на фиг. 5-разрез по Б-Б на фиг. 4; фиг. 6-разрез по В-В на фиг. 4; на фиг. 7- разрез по Г-Г на фиг. 4; на фиг. 8-разрез по Д-Д на фиг. 2 головки швейной машины и механизма поворотного перемещения материала; на фиг. 9-разрез по Е-Е на фиг. 8;
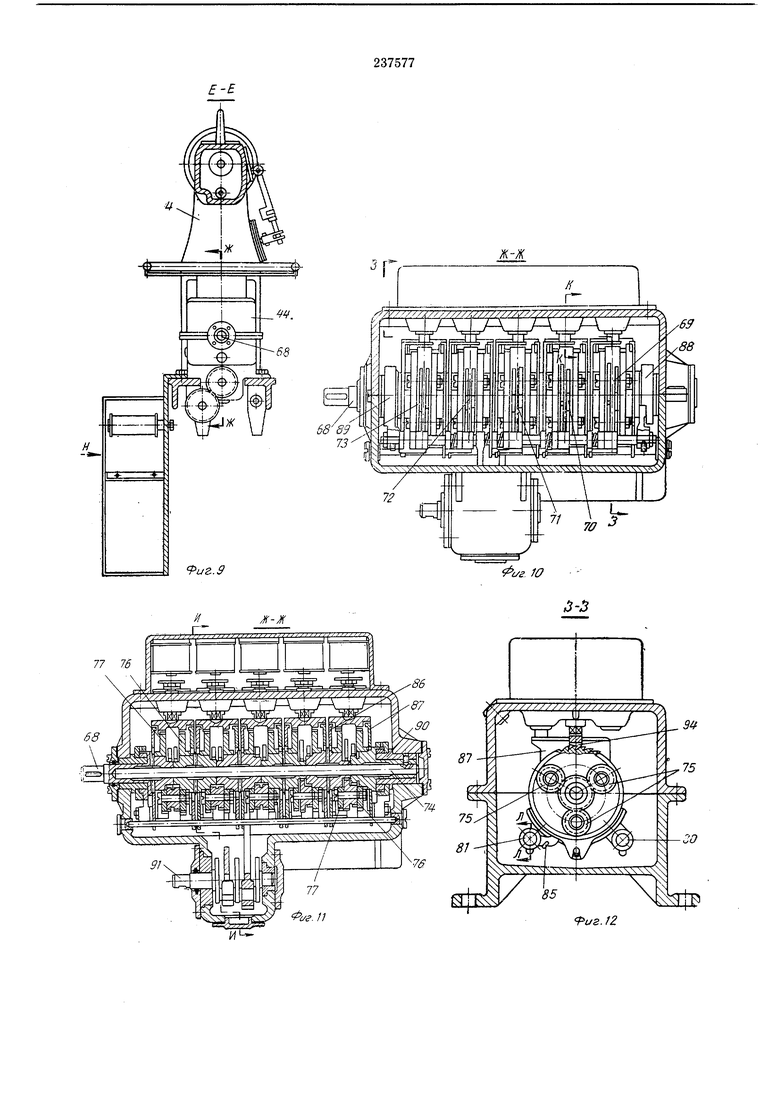
на фиг. 10-разрез по Ж-Ж на фиг. 9 корпуса суммирующего устройства; на фиг. 11 - разрез по Ж-Ж на фиг. 9 всего суммирующего устройства; на фиг. 12-разрез по
3-3 на фиг. 10; на фиг. 13-разрез по И-И на фиг. 12; на фиг. 14-разрез К-К на фиг. 10; на фиг. 15-разрез по Л-Л на фиг. 11; на фиг. 16-разрез по М-М на фиг. 13; на фиг. 17-вид по стрелке Я на фиг. 9 на считывающее устройство и лентопротяжный механизм (крышка снята); на фиг. 18 - разрез по О-О на фиг. 17; на фиг. 19-вид сверху на считывающее устройство и лентопротяжный механизм (фиг. 17); на фиг. 20-
разрез по Я-Я на фиг. 17; на фиг. 21-вид по стрелке Р на фиг. 1 (на корректирующее устройство); на фиг. 22-вид слева на корректирующее устройство (фиг. 21) на фиг. 23-разрез по С-С на фиг. 21; на фиг. 24-
разрез по Г-Т на фиг. 22; на фиг. 25-вид сверху на корректирующее устройство, снятое с полуавтомата; на фиг. 26-разрез по У-У на фиг. 24; на фиг. 27-разрез по Ф-Ф на фиг. 25; на фиг. 28-разрез по Э-Э на фиг.
27. На фиг. 29-электросхема управления полуавтомата.
Все механизмы полуавтомата размещены на основании, состоящем из станины /, установленной на ней сварной рамы 2 и деревянс помощью швейной- машины 4 тина 202 KvT. ПМЗ, в конструкцию которой внесен ряд изменений.
Все механизмы нолуавтомата, кроме вакуум-насоса, получают движение от главного нала швейной машины 4, движение на который передается с номоп,ью клиноременпой передачи 5 от электродвигателя 6 через электромагнитную фрикционную муфту 7.
Исполнительпые устройства муфты 7 - электромагпитные муфты 8-10 обеспечивают работу швейной машин-ы с постоянной скоростью при обработке изделия; снижение числа оборотов главного вала швейной машины, необходимое при повороте изделия на угол, больше 30° и перед остановом машины, останов полуавтомата с фиксированным верхним положением иглы швейной машины.
При обработке на полуавтоматах детали находятся на в.акуумной кассете 11, нредставляюшей собой полую коробчатую конструкцию с пазом для прохождения иглы и отверстиями в верхней стенке. Сверху кассеты установлены ограничитель 12 для ориентации деталей и предотврашения их смещения при обработке на полуавтомате.
Кассета имеет штуцер 13, на который надет гибкий шланг 14, соединяющий полость кассеты с кнопочным устройством /5, регулирующим разряжение в кассете при кнопок /5, П путем изменения площади поперечного сечепия участка воздухопровода и перекрывающим отсасывающий трубопровод при нажатии на кнопку 18. Кнопочное устройство соединено шлангом 19 с ресивером 20 вакуумной станции, включающей в себя, кроме ресивера, вакуум-насос 21. Для контролирования разряжения на ресивере 20 установлен вакуумметр 22, а для выключения приводного электродвигателя 23 вакуум-насоса при создаНИИ в ресивере заданного разряжения установлено реле давления.
Кассета закреплена винтами 24 к ушкам двух цилиндрических ползушек 25, имеющих возможность перемещаться внутри трубчатой рамы 26. Для предотвращения самопроизводного перемещения ползушек 25 одна из них поджата подпружиненным шариком 27. Рама 26 может перемещаться по цилиндрическим направляющим 28 крестовины 29, жестко соединенной со стаканом 30.
Кассета с материалом совершает сложное движение, состоящее из перемещения вдоль контура строчки (перпендикулярно оси симметрии головки машины) и поворота относительно оси, совпадающей с осью иглы швейной машины.
Перемещение вдоль контура строчки осуществляется за счет перемещения нижней 31 и верхней 52 транспортирующих реек вместе с иглой 33 швейной машины. Игловодитель 34 и верхняя р.ейка 32 качаются вместе с рамкой 35 относительно оси 36.
ленного на главном валу швейной машины, от того же эксцентрика получает движение и нижняя рейка 31. Механизмы иглы, нитепритягивателя, челпока и верхней транспортирующей рейки остаются без изменения относительно механизмов машины 202 кл. ПМЗ.
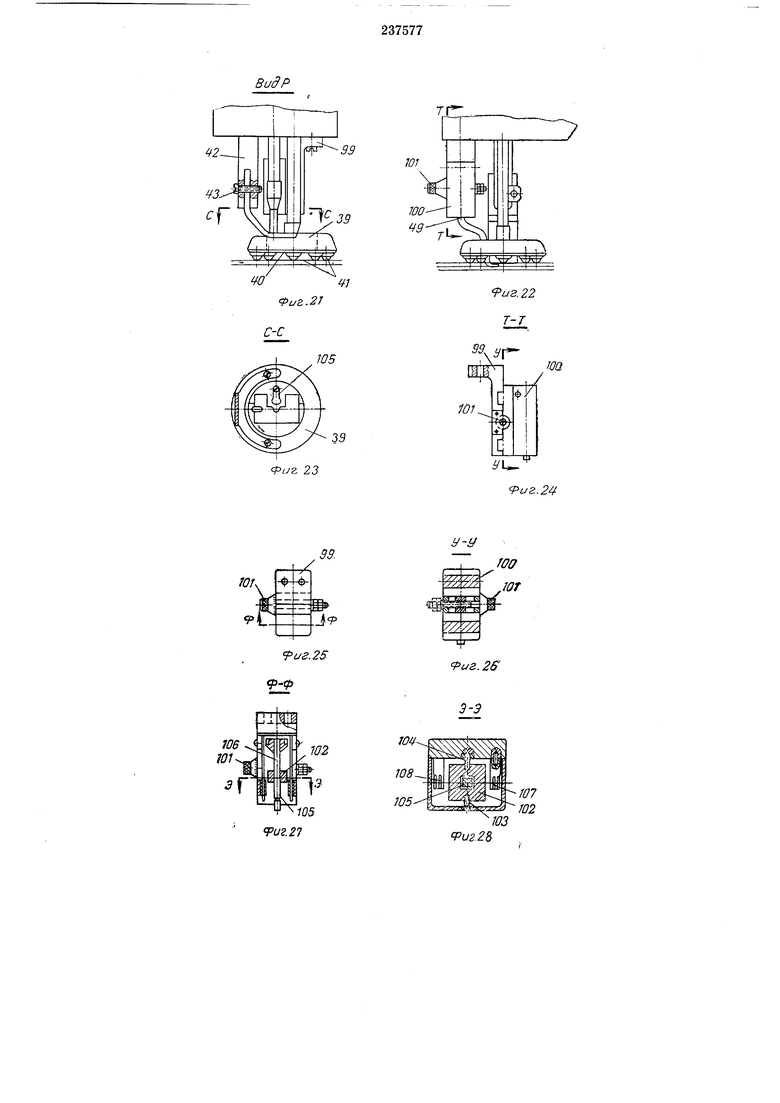
Конструкция верхней прижимной лапки 5S изменена, лапка имеет большую опорную поверхность и при кимает материал в процессе поворота кассеты по выходе иглы из материала. Лапка 38 состоит из внешнего кольца 39 и внутреннего кольца 40 с вложенными в него шариками 41 и кренится к стержн о 42 винтом 43. Шарики позволяют стерл ню лапки оставаться неподвижным при повороте кассеты.
Поворот кассеты с материалом осуществляется при повороте стакана 30, получающего движение от суммирующего устройства 44 системы управления полуавтоматом через конические шестерни 45 и 46.
Конструкция механизма нродольного перемещения материала имеет регулировку длины стежка, устроенную по типу такого устройства машины 94. кл. ПМЗ. Наличие указанной регулировки позволяет, используя одну программу новоротных перемещений материала, вынолнять строчки на узлах заготовки всех размеров данной модели обуви.
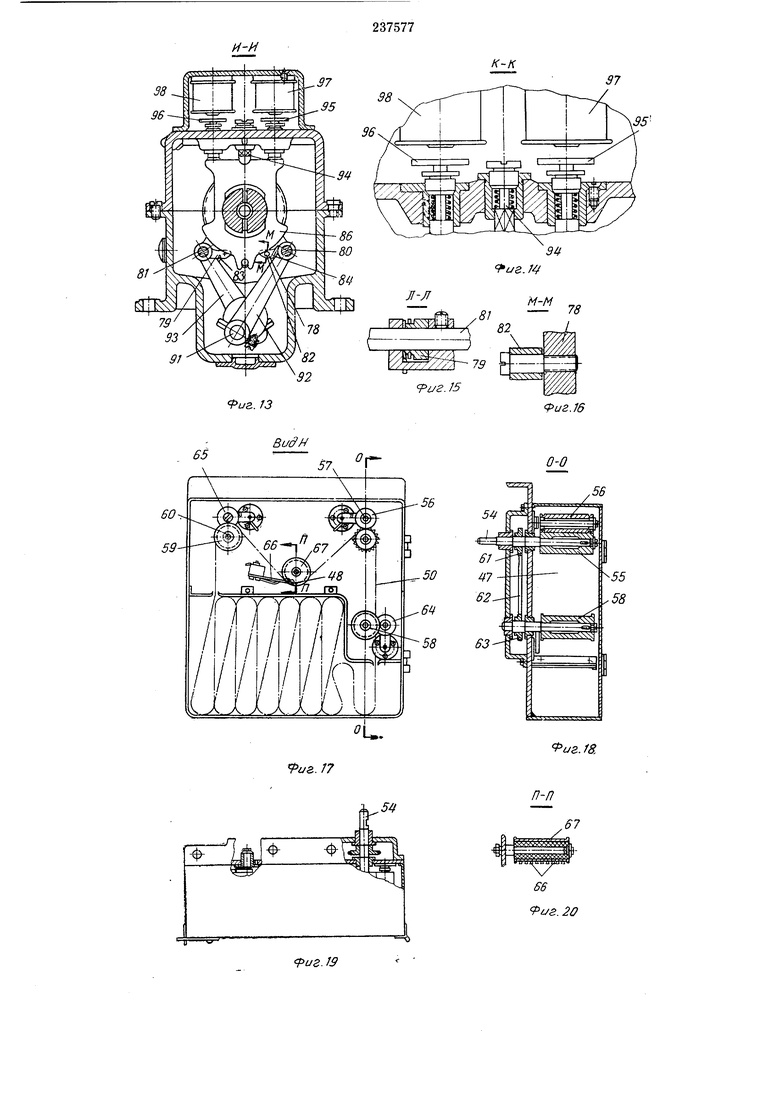
Система управления включает в себя механизм 47 транспортирования перфоленты и механизм 48 считывания программы, суммирующее устройство 44 и механический датчик 49 положения края верхней из сшиваемых деталей.
Запись программы осуществляется на фотопленке 50 на 12 дорожках. Восемь дорол :ек предназначены для записи угла поворота транспортирующего механизма, одна - для коррекции полол ;ения деталей относительно иглы при выполнении краевых строчек и три дорол ки - для снижения числа оборотов главного вала машины при отработке больших углов поворота и останова машины с фиксацией иглы машины в верхнем положении.
Лентонротял ный механизм получает движение от вала 51 швейной машины через специальную (с выстоем) червячную пару 52-55. Вместе с валом 54 вращается жестко связанный с ним ведущий барабан 55, имеющий шипы, входящие в краевую перфорацию ленты, и транспортирующий ее. Движение перфоленты прерывистое. Лента 50 поджимается к барабану 55 подпрул :иненным роликом 56, свободно вращающимся но оси 57.
Для обеспечения неоднократного воспроизведепия полуавтоматом одной и той программы без перемотки перфоленты программа записана на бесконечной ленте.
От барабана 55 лента возвращается к считывающему устройству 48 барабаном 58, огибая нри этом барабан 59, свободно вращающийся на оси 60. Барабан 58 получает движение от вала 54 через шкив 61, тросик 62 и шкив 63. Лента поджимается к барабанам 5S и
59 своболно вращающимися подпружиненными роликами &4, 65. Между барабанами 55 и 55 на ленте делается некоторый нануск для предотвращения ее обрыва.
программы производится щупами 66, прижаплмл к неподвижному металлическому барабану 67. По мере прохождения перфоленты щупы через пробитые на ней отверстия за.11 п;ают электрическую цепь электромагнитоз, включающих или выключающих соответствующие механизмы.
Суммирующее устройство 44 представляет собой планетарно-дифференциальный механизм, работающий по принципу сумматора. Управление работой механизма осуществляется автоматически, согласно программе, записанной на перфоленте. Сумматор обеспечивает поворот выходного вала 68 s диапазоне от О до 90° с интервалом в 1°.
Суммирующий механизм состоит из пяти дифференциалов 69-73, расположенных на общей оси 74. Один из дифференциалов - 73 - является корректирующим. Сателиты 75 каждого из дифференциалов расположены между двумя водилами-храповиками 76 « 77, имеющими противоположные направления зубьев, что позволяет собач кам 78 и 79 поворачивать дифференциал как против, так и по наиравлению движения часовой стрелки.
Собачки 78 « 79 щарнирно сидят иа двух осях-водилах 80 и 81 и имеют ролики 82 и 83, поджатые пружинами 84 и 85 к дискам 86 и 87. Оси-водила закреплены на коромыслах 88 и 89, одно из которых (88) щарнирно сидит на неподвижной ступице 90 щестерни первого дифференциала. С входным коленчатым валом 91 оси-водила 80, 81 соединены шатунами 92 и 93.
Каждый дифференциал в нерабочем положении фиксируется одним из фиксаторов 94, который тормозит своими зубьями водилахраповики 76 и 77. Диски 86 и 87 через фиксатор 94 соединены с лепестками 95 и 96 электромагнитов 97 и 98; суммирующий механизм имеет десять таких электро.магнитов, по два на каждый дифференциал, для растормаживания хра.повиков 76 и 77 и создания возможности зацепления одного из храповиков с соответствующей из собачек 78 и 79 (фиг. 11 - 15).
С целью обеспечения постоянства расстояния от кромки детали до строчки ири выполнении краевых строчек в систему управления включено корректирующее устройство, состоящее из следящего устройства и исполнительНого механизма, которым является дифференциал 73 суммирующего устройства.
Расстояние от кромки детали до строчки контролируется датчиком 49, кронщтейн 99 которого закреплен на рука1ве мащины. Корпус 100 может перемещаться при повороте головки винта 101, что позволяет иастраивать устройство на контроль различных расстояний от края детали до строчки. В корпусе 100 помещена направляюп1,ая 102, имеющая возможность поворота относительно осей 103 и 104, закрепленных в корпусе.
В вертикальном отверстии направляющей может перемен|аться 105, нижнш конец которого поджпмается к краю верхней из сщиваемых деталей пружпной 106. В корпусе 100 на.ходятся контакты 107 W8, замыкаемые щупом 105 при изменении расстояния от 1края детали до строчки.
Программа на работу корректируюп1,его устройства записывается иа одну дорожку иерфоленты пробиванием отверстий по всей ее длине. Число пробитых отверстий соответствует числу стежков, выполняемых по краю заготовки, что позволяет иметь 109 замкнутым (см. фиг. 29) при отработке угла поворота. При выполнении нек)аевых строчек отверстия не иробиваются, контакт 109 постоянно разомкнут, в результате чего корректирующее устройство все время отключено.
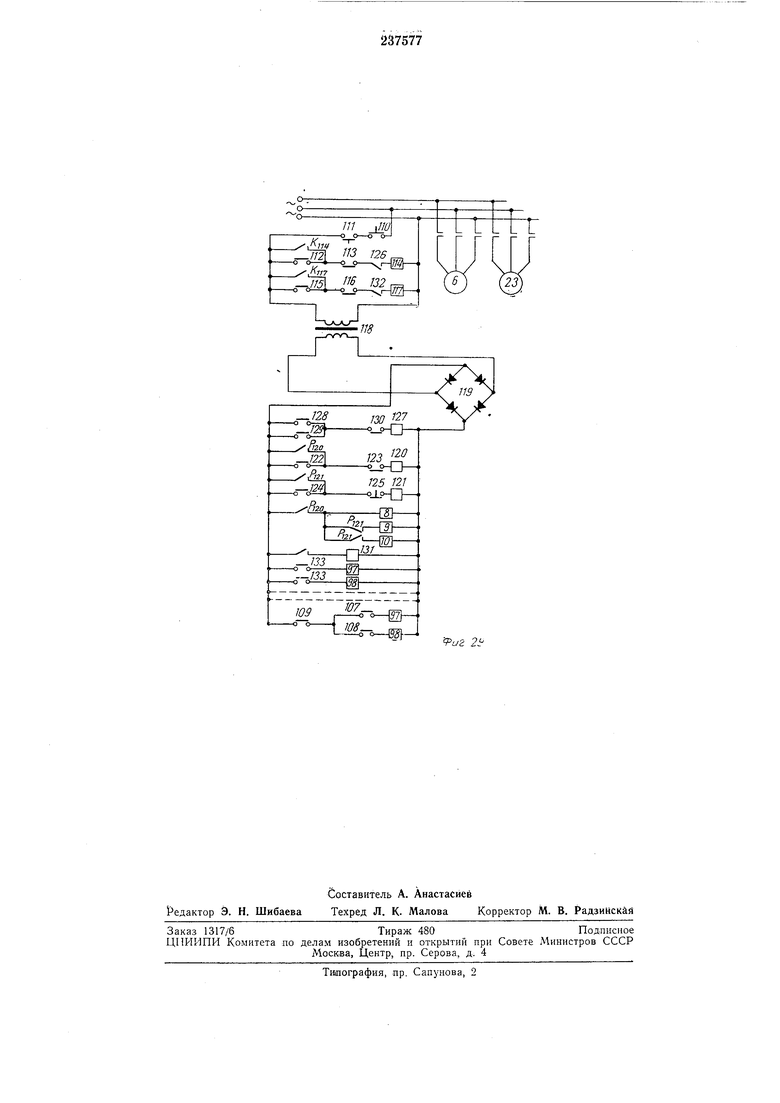
Питание электродвигателей 6 и 23 осуществляется от сети иере.менного тока (фиг. 29). Вл.почение электрическо цепи уиравления двигателями производится кноикой 110, а выключение - кнопкой 111. Пуск и останов двигателя 6 выполняется кнопками 112 и ИЗ через магнитный пускатель 114, я двигателя 23 - кноиками 115 и 116 с магнитным иускателем 117.
Питан1 е слаботочной системы осуществляется через ионижающий трансфор.}атор 118 и выпрямитель 119. Управленпе работой электромагнптных муфт 8-10 производится считываюи им устройством 48 посредство.м включения и выключения реле 120 и 121 замыканием и размыканием контактов 122-124, которые осуи1ествляются при считывании сигналов, записанных на трех дорожках иерфоленты.
Пуск полуавтомата иосле сборки обрабатываемого узла В1 полняется кнопкой 125. Останов мащпны при обрыве верхней илп нижней нити осуществляется размыканием цепи магнитного иускателя 114 через реле 127, срабатываюи1ее ири замыкании одного из контактов 128 и 129, контролирующих нити; останов производится при нахождении иглы швейной маИ1ИНЫ вне материала, что обеспечивается наличием контакта 130, замыкаемого ;кулачком, сидяишм на главном валу машин1)1 (по тииу соответствуюи1,его устройства четырехголовочного в1)Ш,1ивального иолуавтомата). При превышении заданной величины разряжения в ресивере 20 ироисходит выключение двигателя 23 от реле 131, размыкающего контакт 132 цепи магнитного пускателя 117.
Управление десятью электромагнитами 97 и 98 суммирующего уетройства осуществляется замыканием десяти контактов 133 при счптыванпп программы с перфоленты.
Работает полуавтомат следующим образом. Работница сначала нажимает кноики 110-115, включая этим цепь управления двигателями и сами двигатели 6 и 23, затем укладывает на кассету // детали узла, включая
соответствующие кнопки устройства 15 для изменения разряжения в кассете.
После укладки и за кренления всех деталей и оиускания прижимной лапки 38 необходимо нажать кнопку 125, при этом леиь муфты 10 размыкается и замьикается цепь муфты 9, что обеспечивает работу швейной машины в период иуска на иониженных оборотах.
В момент начала вран, главного вала машин1 1 начинают работать «се механизмы швейной машины и системы управления.
Рейки 31 и 32 начинают иеремен.1,ать кассету с материалом вдоль строчки пр.и нахождении иглы 33 швейной машины в материале, при этом игла отклоняется относительно оси 36. При перемен1ении материала вдоль строчки ползунки 25 .перемещаются относительно рамы 26, а рама 26 перемещается относительно неподвижных в момент продольного перемещения направляющих 28, причем суммарное перемещение равно шагу строчки. После образования одного стежка издел ие должно быть повернуто на угол, определяемый формой строчки и заданный на перфоленте 50.
При прохождении иод несколькими из контактов 66 участков ленты с отверстиями эти контакты замыкают цепь соответствуюииьх из магнитов 97, 98, ироисходит их срабатывание и леиесБки 95, 96 прплсимаются к включенным магнитам. Лепестки растормаживают фиксаторы 94 с храиовиками-водилами 76, 77 и поднимают диски 86, 87, давая возможность зацепления собачек 78, 79 с храповиками-водилами 76, 77. Вошедшие в закрепление с храповиками собач:ки ири движении вверх повернут их вместе с ося.ми саттелитов на заданный угол относительно входных шестерен дифференциалов, что вызовет поворот выходных шестерен дифференциалов на соответствующий угол. Суммарный угол поворота выводится на вал 68, с которого поворот передается через пару шестерен 45, 46 стакану 30, поворачивающему направляющие, 28 рамы 26, ползушки 25 и кассету с материалом на заданный угол.
Поворот материала относительно оси иглы ироа-1зводится в момент, соответствующий нахоЛСдению иглы 1вне материала, при этом материал дополнительно поджат к кассете прижимной лапкой 38.
При выиолнении нескольких иервых стежков выполняемого шва со считывающего устройства подается сигнал на размьикание цепи электромагнитной муфты 8, в результате чего число оборотов машины увелич ивается до максимальной величины.
При выполнении краевых строчек в случае И3 менения расстояния от строчки до кро.мки детали щуп 105 отклоняется влево под действием края детали или вправо под действием пружины 106 и замыкает контакты 108 или 107, включаю цие ири замыкании контакта 109 один из электромагнитов 97, 98 корректирующего дифференциала 73, который изменит выходной угол поворота вала 68 суммирующего
устройства в сторону уменьшения отклонения расстояния от края детали до строчки.
При отработке больших углов -поворота материала машина переводится на работу с пониженным числом оборотов пуге.м включения
электромагнитных муфт 8, 9, замаыканием
контакта 122, а выключение этих муфт после
отработки угла осуществляется размыканием
контакта 123.
За несколько стежков до окончания строчки снижается скорость работы машины, после чего по сигналу считывающего устройства замыкается контакт 124 и срабатывает реле 121, разрывающее цепь электромагнитной муфты 9 и замыкающее цепь муфты 10, осуществляющей фиксированный останов машины.
После этого работница выключает отсос воздуха из вакуумной кассеты нажатием кнопки 18 устройства 15 и снимает прошитые детали с кассеты. Затем цикл работы повторяется,
причем перемещение материала производится в направлении, иротивоположном перемещению его ири предшествующем цикле, в результате чего отпадает необходимость возвращения кассеты в исходное положение по окончаНИИ каждого цикла работы.
Предмет изобретения
Швейный иолуавтомат для выполнения неза1М«нутых строчек, например, на деталях и
узлах обуви, состоящий из швейной машины; кассеты для фиксирования детали; механизма перемещения кассеты относительно иглы, состоящего из устройства для вращения кассеты относительно иглы швейной машины и устройства для перемещения кассеты вдоль строчки, программного механизма и механизма привода, отличающийся тем, что, с целью повышения ироизводительности и точности работы иолуавтомата, программный механизм состоит
из считывающего устройства для считывания программы, записанной на перфоленте, лентопротяжного механизма, следящего приспособления и суммирующего устройства, кинематически связанного с устройством для вращения кассеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| Способ прокладывания отделочных строчек на швейной машине с программным управлением | 1983 |
|
SU1124056A1 |
| КРАЕОБМЕТОЧНАЯ ШВЕЙНАЯ МАШИНА | 2011 |
|
RU2493302C2 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1969 |
|
SU244105A1 |
| Устройство для стачивания деталей швейных изделий по заданному контуру | 1978 |
|
SU767253A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1964 |
|
SU166226A1 |
| ШВЕЙНАЯ МАШИНА ЗИГЗАГ | 2010 |
|
RU2415977C1 |
| ШВЕЙНАЯ МАШИНА ЗИГЗАГ | 2010 |
|
RU2415209C1 |
| Устройство для управления швейной машиной | 1984 |
|
SU1201374A1 |
Фиг it
г-г
Фиг 7
VU2.6
36
37
риг. 8
1О
г. 1Z Риг. 13 ТТЛ L/e. J5 р :,i/ Е:;;;; -.ххчхч /// Фиг.Ю
0-0
3-56
и&. 1
U.
Риг. 18.
гт-
с-с
иг 23
ГГ
,w
700
-7U
fuB. 22
Т-7 93. f
/Ш
IN
5f
i
yi
/(7 Л7/
.
fPu228
fuz 2
