Известны захваты для транспортирования паркетов листового материала, содержащие навешиваемый на крюк грузоподъемного механизма корлус, в :котором смонтированы подвижные рычаги, несущие захватные лапы с конечными 1выключателями.
Однако они сложны и «е предотвращают деформирование трайспортируемого груза.
Отличие Описываемого захвата от известных состоит в том, что рычаги, несущие захватные ланы, выполнены в виде реек, перемещающихся возвратно-поступательно в смещенных по отношению .продольной оси направляющих корпуса и взаилюдействующих с вало-м-шестеряей, расположенной между реек с приводом от червячной нары.
Кроме того, на корпусе смонтирован нрижим, -выполненный в виде вннта с приводом от червячной пары.
Такое выполнение захвата для транспортирования пакетов листового материала упрощает конструкцию и предотвращает деформирование груза.
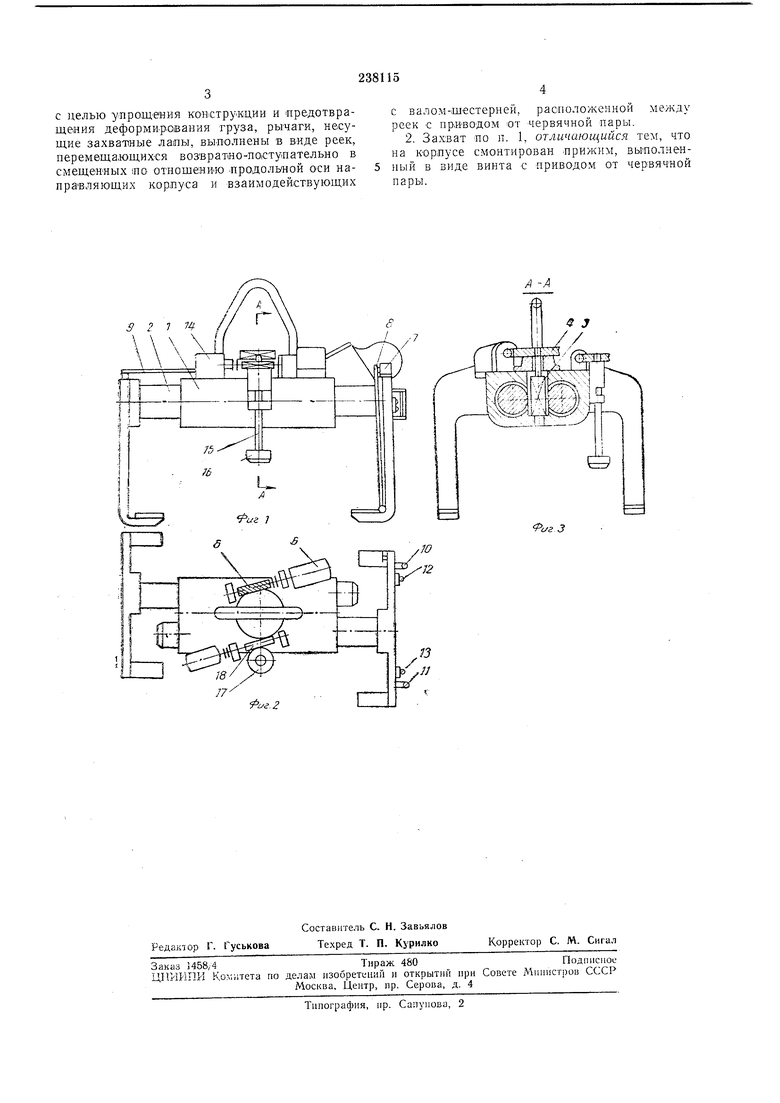
На фиг. 1 схематически изображен описываемый захват, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сбоку.
лей 8 и 9, рукояток 10 и 11 перемещения захватных лап, кнопочных включателей 12 1г 13, электродвигателя М, привода прижима 15, резинового подпятника 16, червячной передачи /7 и 18 прижнма 15.
Работа захвата заключается в следующем.
Чтобы захватить пакет листового материала с помощью кнопочного включателя 12, электродвигатель 6 вращает вал-шестерню 3 через червячный узел (детали 4 и 5), сообщая параллельное возвратно-поступательное движение зубчатым рейкам 2. Прп этом грузозахватные лапы разводятся на необходимую величину. После захвата пакета груза шина конечного выключателя 8, касаясь пакета, отключает электродвигатель 6, предохраняя пакет от повреждения. С помощью кнопочного включателя 1- прижимом 15 пакет прижимается сверху, предотвращая падение листов.
Предмет изобретения
1. Захват для транспортирования пакетов листового материала, содержащий навешиваемый на крюк грузоподъемного механизма корпус, в котором смонтированы подвижные рычаги, несущие захватные латы с конечны 11 выключателями, отличающийся тем, что
с целью упрощения конструащии и предотвращения деформИрСвания груза, рычаги, несущие захватные лапы, выполнены в виде реек, перемещающихся возвратно-постулательно в смещенных то отнощеиида продольной ОСИ направляющих корпуса и взаимодействующих
с валом-шестерней, расположошои между реек с приводом от червячной пары.
2. Захват по п. 1, отличающийся тем, что на корпусе смонтирован прижим, вьшолнениый в виде винта с приводом от червячной пары.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Вилочный захват для пакетированных грузов | 1983 |
|
SU1152914A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ БЕСПОДДОНКОГО ТРАНСПОРТИРОВАНИЯ КИРПИЧА | 1970 |
|
SU272514A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1968 |
|
SU206825A1 |
| Грузозахватное устройство | 1990 |
|
SU1801921A1 |
| ЗАХВАТ ДЛЯ БЫТОВЫХ ВАНН | 1969 |
|
SU233862A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯКИРПИЧАПАКЕТА | 1970 |
|
SU266178A1 |
| Грузозахватное устройство | 1981 |
|
SU1031869A1 |
| Автоматический клещевой захват | 1980 |
|
SU925838A1 |
3 2 1 т
