Изобретение относится к грузоподъемным кранам, обслуживающим нагревательные печи с выкатным подом и прессы с выдвижным столом.
Известны грузоподъемные краны для захвата, транспортировки и точной укладки раскаленных и холодных заготовок, включающие пролетное строение с грузовой тележкой, несущей грузозахватный орган, представляющий траверсу с захватными подвижными лапамн. Траверса подвещена посредством тросо-блочной системы к подъемным лебедкам грузовой тележки и закреплена на подвижных щтангах, образующих направляющую щахту, смонтированную на этой тележке.
Однако известные краны не обеспечивают точной укладки транспортируемого материала и надежности его крепления на захватных лапах.
В предложенном грузоподъемном кране для повыщения надежности его работы и улучшения маневренности траверса выполнена в виде крестообразной рамы с диагоиальио расположенными на ее консолях пазами с направляющими для перемещения с помощью механизма подачи захватных лап и фиксирующих упоров. Траверса снабжена защитным тепловым экраном и подвижным щупом контроля положения захватных лап. Механизм подачи лап и упоров выполнен в виде установленного на траверсе
редуктора, имеющего комбинированные фрикционные муфты. Каждая из этих муфт - сочетание дисковой муфты, передающей ограниченный крутящий момент на винты, которые перемещают лапы и упоры ири захвате заготовки, и обгонной муфты, передающей максимальный крутящий момент на винты лап при выходе их из-иод заготовки.
Щуп траверсы может быть выполнен с рабочим органом в виде щтока, один конец которого совпадает с плоскостью захвата лап, а другой воздействует на конечный выключатель. Выключатель связан с электромеханическим датчиком, дающим импульс на измерительную систему, отражающую на прибореуказателе положение лап перед захватом заготовок.
Защитный тепловой экран может быть выполнен в виде отдельных комплектов пластин, один из которых жестко закреплен снизу траверсы, а другой подвижен за счет крепления его пластин к торцам лап и упоров. Этим обеспечивается перекрывание пазов траверсы при движении лап и упоров.
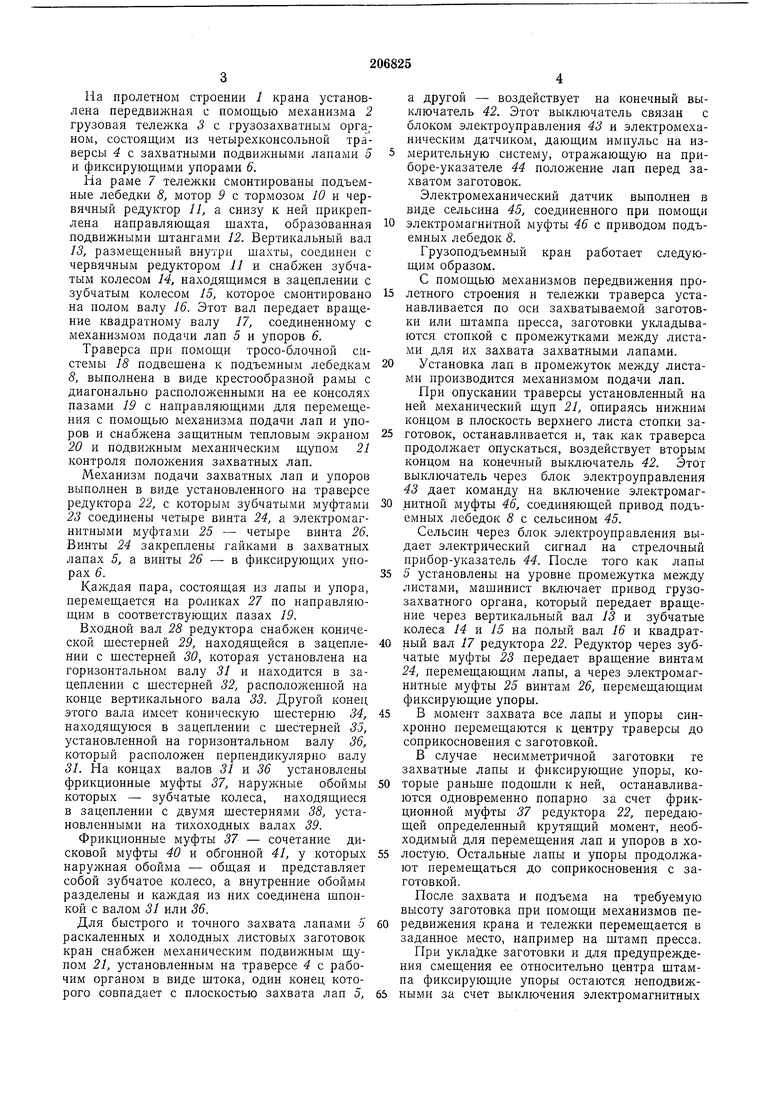
Иа фиг. 1 дан общий вид описываемого крана; на фиг. 2 - привод грузозахватного органа; на фиг. 3 - разрез по А-А на фиг. 2; на фиг. 4 - механизм подачи захватных лап и фиксирующих упоров; на фиг. 5 - траверса с щупом и лебедкой.
На пролетном строении 1 крана установлена передвижная с помощью механизма 2 грузовая тележка .3 с грузозахватным орга; ном, состоящим из четырехконсольной траверсы 4 с захватными подвижными лапами 5 и фиксирующими упорами 6.
На раме 7 тележки смонтированы подъемные лебедки 8, мотор 9 с тормозом 10 и червячный редуктор 11, а снизу к ней прикреплена направляющая щахта, образованная подвижными штангами 12. Вертикальный вал 13, размещенный внутри шахты, соединен с червячным редуктором 11 и снабл ен зубчатым колесом 14, находящимся в зацеплении с зубчатым колесом 15, которое смонтировано на полом валу 16. Этот вал передает вращение квадратному валу 17, соединенному с механизмом подачи лап 5 и упоров 6.
Траверса при помощи тросо-блочной системы 18 подвещена к подъемным лебедкам 8, выполнена в виде крестообразной рамы с диагонально расположенными на ее консолях пазами 19 с направляющими для перемещения с помощью механизма подачи лап и упоров и снабжена защитным тепловым экраном 20 и подвижным механическим щупом 21 контроля положения захватных лап.
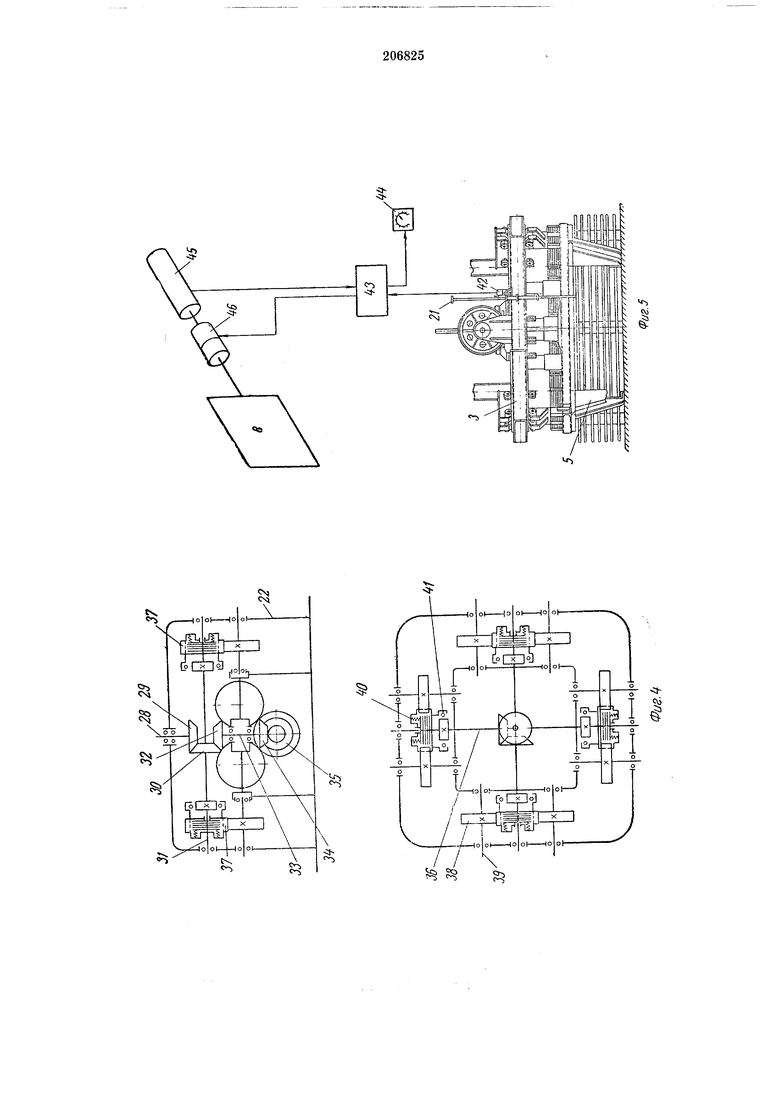
Механизм подачи захватных лап и упоров выполнен в виде установленного на траверсе редуктора 22, с которым зубчатыми муфтами 23 соединены четыре винта 24, а электромагнитными муфтами 25 - четыре винта 26. Винты 24 закреплены гайками в захватных лапах 5, а винты 26 - в фиксирующих упорах 6.
Каждая пара, состоящая из лапы и упора, перемещается на роликах 27 по направляющим в соответствующих пазах 19.
Входной вал 28 редуктора снабжен конической шестерней 29, находящейся в зацеплении с шестерней 30, которая установлена на горизонтальном валу 31 и находится в зацеплении с щестерней 32, расположенной на конце вертикального вала 33. Другой конец этого вала имеет коническую щестерню 34, находящуюся в зацеплении с шестерней 35, установленной на горизонтальном валу 36, который расположен перпендикулярно валу 31. На концах валов 31 и 36 установлены фрикционные муфты 37, наружные обоймы которых - зубчатые колеса, находящиеся в зацеплении с двумя шестернями 38, установленными на тихоходных валах 39.
Фрикционные муфты 37 - сочетание дисковой муфты 40 и обгонной 41, у которых нарулшая обойма - общая и представляет собой зубчатое колесо, а внутренние обоймы разделены и каждая из них соединена щпонкой с валом 31 или 36.
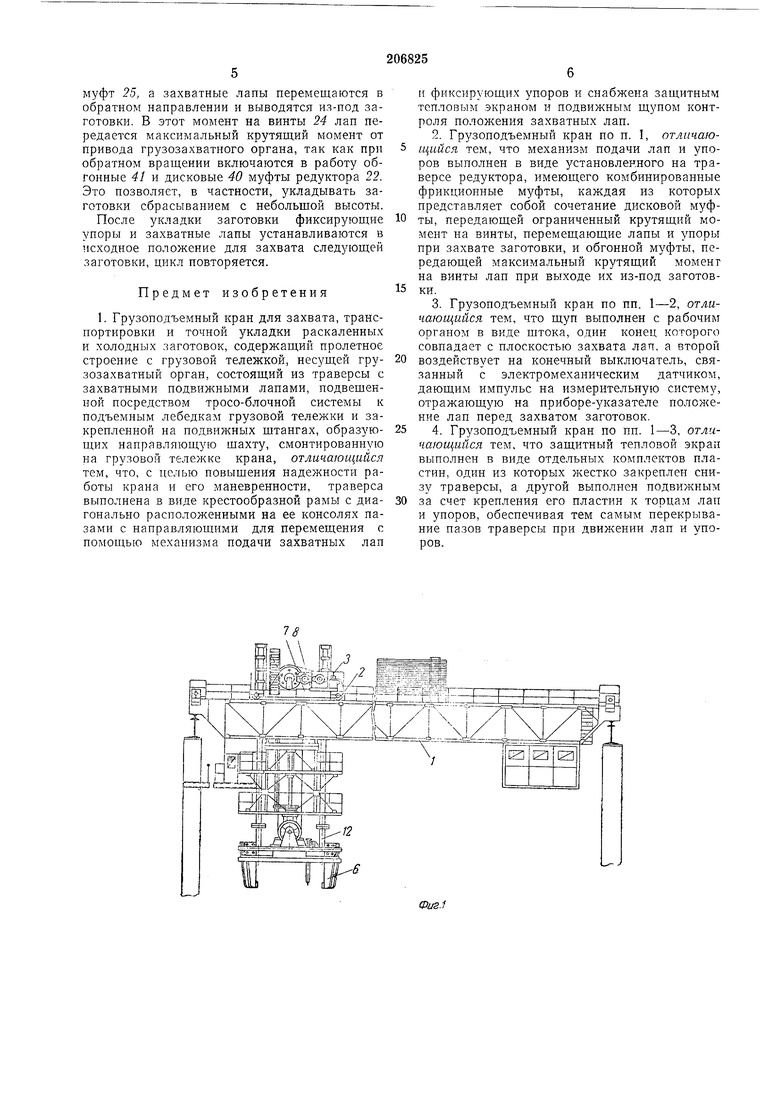
Для быстрого и точного захвата лапами 5 раскаленных и холодных листовых заготовок кран снабжен механическим подвижным щупом 21, установленным на траверсе 4 с рабочим органом в виде штока, один конец которого совпадает с плоскостью захвата лап 5,
а другой - воздействует на конечный выключатель 42. Этот выключатель связан с блоком электроуправления 43 и электромеханическим датчиком, дающим импульс на измерительную систему, отражающую на приборе-указателе 44 положение лап перед захватом заготовок.
Электромеханический датчик выполнен в виде сельсина 45, соединенного при помощи
электромагнитной муфты 46 с приводом подъемных лебедок 8.
Грузоподъемный кран работает следующим образом. С помощью механизмов передвижения пролетного строения и тележки траверса устанавливается по оси захватываемой заготовки или штампа пресса, заготовки укладываются стопкой с промежутками между листами для их захвата захватными лапами.
Установка лап в промежуток между листами производится механизмом подачи лап.
При опускании траверсы установленный на ней механический щуп 21, опираясь нижним концом в плоскость верхнего листа стопки заготовок, останавливается и, так как траверса продолжает опускаться, воздействует вторым концом на конечный выключатель 42. Этот выключатель через блок электроуправления 43 дает команду на включение электромагнитной муфты 46, соединяющей привод подъемных лебедок 8 с сельсином 45.
Сельсин через блок электроуправления выдает электрический сигнал на стрелочный прибор-указатель 44. После того как лапы
5 установлены на уровне промежутка между листами, машинист включает привод грузозахватного органа, который передает вращение через вертикальный вал 13 и зубчатые колеса 14 и 15 на полый вал 16 и квадратный вал 17 редуктора 22. Редуктор через зубчатые муфты 23 передает вращение винтам 24, перемещающим лапы, а через электромагнитные муфты 25 винтам 26, перемещающим фиксирующие упоры.
В момент захвата все лапы и упоры синхронно перемещаются к центру траверсы до соприкосновения с заготовкой.
В случае несимметричной заготовки те захватные лапы и фиксирующие упоры, которые раньше подошли к ней, останавливаются одновременно попарно за счет фрикционной муфты 37 редуктора 22, передающей определенный крутящий момент, необходимый для перемещения лап и упоров в холостую. Остальные лапы и упоры продолжают перемещаться до соприкосновения с заготовкой.
После захвата и подъема на требуемую высоту заготовка при помощи механизмов передвижения крана и тележки перемещается в заданное место, например на щтамп пресса. При укладке заготовки и для предупреждения смещения ее относительно центра штампа фиксирующие упоры остаются неподвижмуфт 25, а захватные лапы перемещаются в обратном направлении и выводятся из-под заготовки. В этот момент на винты 24 лап передается максимальный крутящий момент от привода грузозахватного органа, так как при обратном вращении включаются в работу обгонные 41 и дисковые 40 муфты редуктора 22. Это позволяет, в частности, укладывать заготовки сбрасыванием с небольшой высоты. После укладки заготовки фиксирующие упоры и захватные лапы устанавливаются в исходное положение для захвата следующей заготовки, цикл повторяется.
Предмет изобретения
1. Грузоподъемный кран для захвата, транспортировки и точной укладки раскаленных и холодных заготовок, содержащий пролетное строение с грузовой тележкой, несущей грузозахватный орган, состоящий из траверсы с захватными подвижными лапами, подвещениой посредством тросо-блочной системы к подъемным лебедкам грузовой тележки и закрепленной на подвижных щтангах, образующих направляющую щахту, смонтированную на грузовой тележке крана, отличающийся тем, что, с целью повыщения надежности работы крана и его маневренности, траверса выполнена в виде крестообразной рамы с диагонально расположенными на ее консолях пазами с направляющими для перемещения с помощью механизма подачи захватных лап
и фиксирующих упоров и снабжена защитным тепловым экраном и подвижным щупом контроля положения захватных лап.
2.Грузоподъемный кран по п. 1, отличающийся тем, что механизм подачи лап и упоров выполнен в виде установленного на траверсе редуктора, имеющего комбинированные фрикционные муфты, каждая из которых представляет собой сочетание дисковой муфты, передающей ограниченный крутящий момент на винты, перемещающие лапы и упоры при захвате заготовки, и обгонной муфты, передающей максимальный крутящий момент на винты лап при выходе их из-под заготовки.
3.Грузоподъемный кран по пп. 1-2, отличающийся тем, что щуп выполнен с рабочим органом в виде щтока, один конец которого совпадает с плоскостью захвата лап, а второй
воздействует на конечный выключатель, связанный с электромеханическим датчиком, дающим импульс на измерительную систему, отражающую на приборе-указателе положение лап перед захватом заготовок.
4. Грузоподъемный кран по пп. 1-3, отличающийся тем. что защитный тепловой экран выполнен в виде отдельных комплектов пластин, один из которых жестко закреплен снизу траверсы, а другой выполнен подвижным
за счет крепления его пластин к торцам лап и упоров, обеспечивая тем самым перекрывание пазов траверсы при движении лап и упоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |
| Кран мостового типа | 1980 |
|
SU893825A2 |
| Кран мостового типа | 1977 |
|
SU652091A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ТЯЖЕЛОВЕСНЫХГРУЗОВ | 1970 |
|
SU260115A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Тележка для крана мостового типа | 1980 |
|
SU895901A1 |
| ЗАХВАТНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ИЗДЕЛИЙ | 1967 |
|
SU206068A1 |
| Кран мостового типа | 1980 |
|
SU893826A2 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ С ФИТИНГАМИ | 2005 |
|
RU2291100C1 |
| Грузоподъемное устройство | 1990 |
|
SU1740311A1 |

te иг
«-
