Изобретение относится к грузозахватным устройствам и может быть применено для отделения путем сдвига листов от стопы., их захвата и перемещения на складах листовых материалов .
Известен захват для листовой стали, состоящий из остова, траверс с поперечинами, лап, поворотных в горизонтальной плоскости, и электромагнитов , смонтированных на тягах 1 .,
Недостатком этого захвата является ограниченная область применения.
Известно захватно-разделихельное устройство, содержащее опору, захватные органы, один из которых имеет высоту, меньшую высоты другого захватного органа, и выполнена в. виде , и трособлочную систему, блоки которой закреплены на втором захватном органе и один из концов ipoса которой соединен с петлей для навески на крюк грузоподъемной маЩины 2.
Однако устройство отличается ненадежностью использования, а также невысокой производительностью из-за
применения ручного труда для фиксации захватных органов.
Цель изобретения - повышение производительности труда и надежности в зксплуатации.
Представленная цель достиг ется тем, что второй захватный орган, включает в себя, по крайней мере, две шарнирно закрепленные на опоре скобы
10 соединенные посредством тяги с клином и снабженные шарнирно соединенными с НШ1Ш подхватными лапгили, которые соединены с другим концом троса, при этом блоки трособлочяой сис15темы закреплены на скобах и на опоре, а клин установлен с во зможностью продольного перемещения относительно опоры от привода.
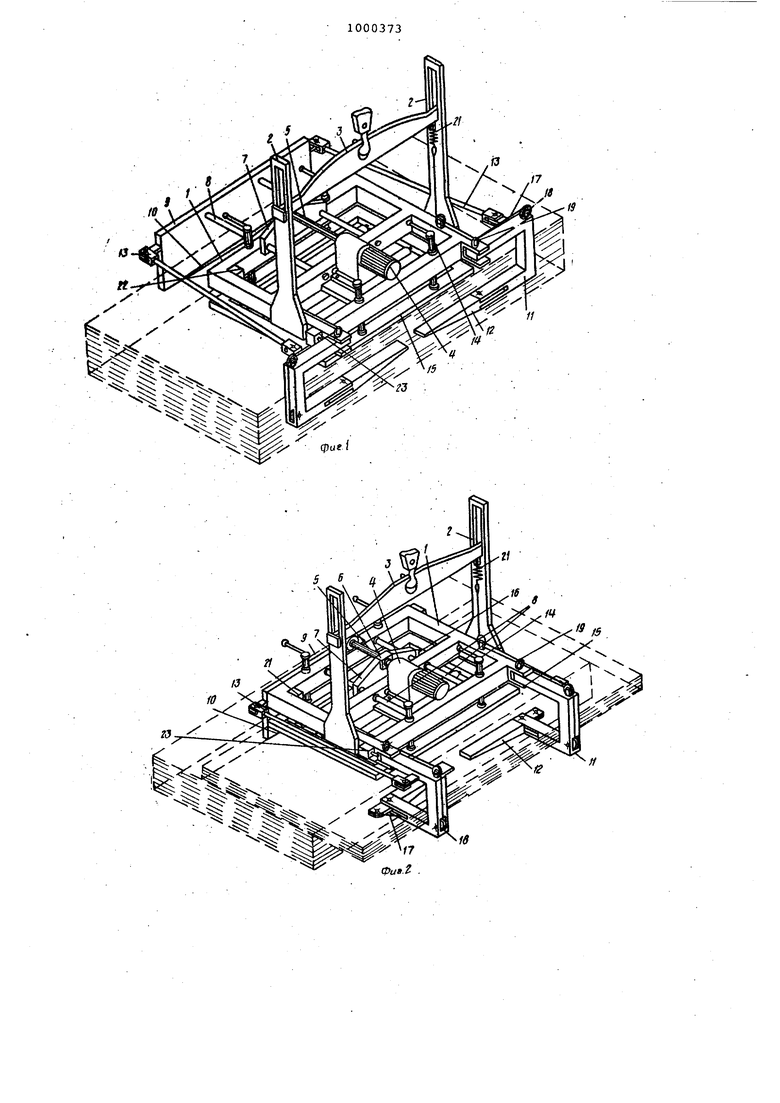
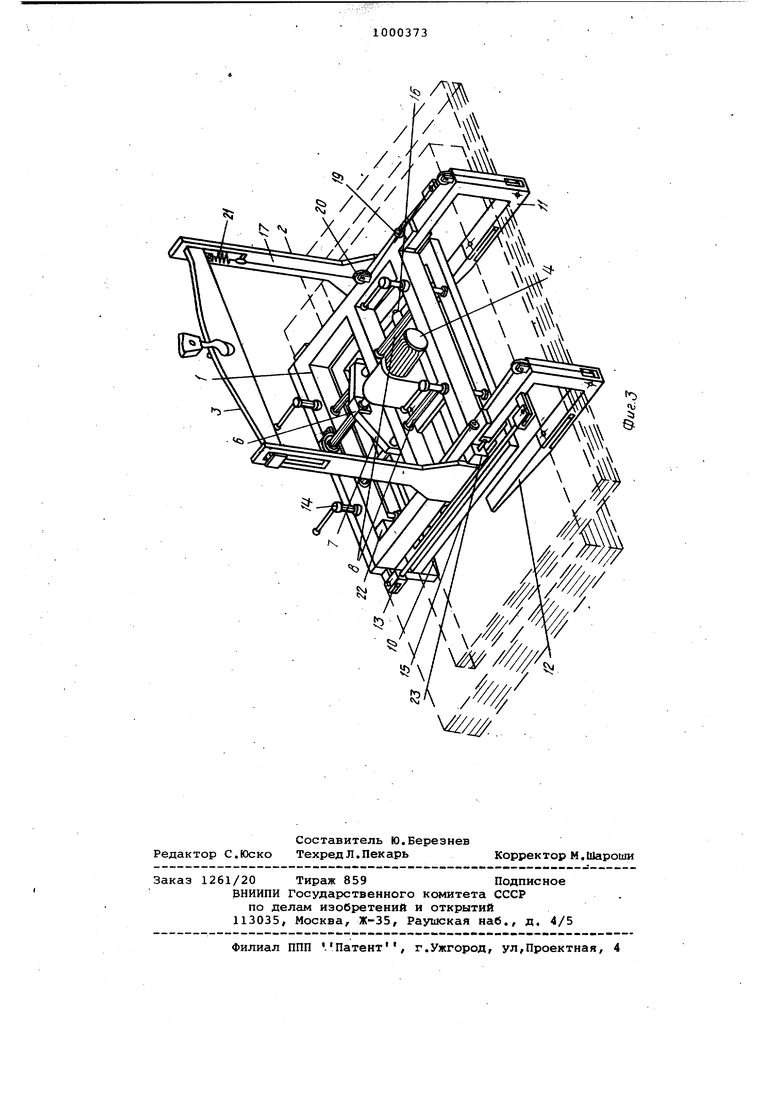
На фиг. JL изображено захватно-раэ20делятель юе устройство, общий вид; на фиг. 2 - то же; перед разделением .листов; на фиг. 3 - то же, после разделения листов.
Захватно-разделительное устройст25во содержит опору 1 с вертикальными стойками 2, в пазах которых расположена траверса 3, подвешиваемая на крюк п ъемного крана.
На «грузрнесущей раме расположен
30 мотор-редуктор 4, к выходнс 4у валу
которого крепится винт 5, опирающийся другим концом в подшипник. На винте 5 находится гайка 6, прикрепленная к планке 7 и жестко соединяющая два штока 8, которые свободно перемещаются в отверстиях опоры 1. К што кам 8 Жестко крепится захватный орган 9, выполненный в виде клина 10, С противоположной стороны захватното органа 9 к опоре I с помощью шар|Нирного соединения крепятся верхние концы двух С-образных скоб 11, к нижним концам которых шарнирно крепятся подхватные лапы 12, предотвращающие прогиб и выпадение нижних листов отделенной части стопы.
Высота рабочей поверхности захватного органа 9 с клином 10 по сравнению с высотой рабочей поверхности С-образных| скоб 11 и подхватных лап 12 имеет меньший размер, обеспечиваю щий надежный сдвиг и захват отделяемой части листов. Определенной длины тяги 13, соединяющие захватный орган 9, выполненный в виде клина 10, со скобами 11, обеспечивают поворот С-о разных скоб 11 на 90°.
Четыре опорных винта 14 проходят через резьбовые гнезда в опоре 1 и шарнирно соединяются С опорной рамой 15, снабженной свободно вращающимися резиновыми валиками 16. Высота расположения опорной рамы 15 зависит от количества отделяемых листов и регулируется опорными винтами.
Концы подхватных лап 12, входящие в, пазы С-образных скоб, шарнирно сое диняются с тросом 17, который проходит внутри захватньбс частей С-образных скоб 11, через блоки 18, закрепленные наскобах ушки 19 и блоки-20, закрепленные на опоре 1. Концы тросов 17 крепятся к пружинам 21, работающим на растяжение и прикрепленным к траверсе 3. Длина канатов 17 определяется в положении, когда траверса 3 с пружинами 21, находящимися в сжатом положении, расположена . внизу пазов вертикальных стоек 2, а подхватные лапы 12 находятся под углом С-образным скобам 11.
Перемещение захватного органа 9, выполненного в виде клина 10, в сторону опоры 1 ограничено конечными выключателями 22, а перемещение С-образных скоб 11 ограничено конечными выключателями 23. Питание мотора-редуктора осуществляется кабелем. Захватно-разделительное устройство управляется крановщиком из кабины.
Захватно-разделительное устройство работает следующим образом.
Устройство, настроенное опорными винтами 14 на захват определенного количества листов, навешивают через проушин траверсы 3 на крюк крана. Электроприводом приводят захватные органы в исходное рабочее положение,
при котором захватный орган 9, выполненный в виде клина 10, и С-образные скобы 11 подхватными лапами 12 занимают параллельное положение, и опускают устройство на стопу листов. Опорная рама 15 с резиновыми валиками 16 устанавливается на середину стопы, а траверса 3 опускается до низа пазов вертикальных стоек 2, ос лабляя натяжение канатов.
После зтого включают мотор-редук.тор 4, вращательное усилие которого через механизм винт-гайка 5 и 6 и планки 7 преобразуется в усилие вдвигания во внутрь опоры 1 штоков В и жестко прикрепленного к ним захватного органа 9, при этом острие клина 10 входит в прослойки между листами, одновременно захватный орган 9 передает через тяги 13 на С-образные скобы11 созданное усилие. С-образные скобы 11 поворачиваются в соосных шарнирах, при этом подхватные лапы 12 нижними концами С-образных скоб 11 прижимаются к стопе листов и являются упорами для поворачивающихся в этот момент С-образных скоб 11.
Сдвигание и захват отделяемой части листов от стопы производится устройством до тех пор, пока захватный орган 9 не коснется штока конечного выключателя 22, отключающего моторредуктор, а С-образные скобы 11 не займут положение, перпендикулярное захватному органу 9, подхватным лапам и стопе листов. При сдвиге между верхними листами отделяемой части и захватно-равделительным устройством возникает трение, которое уменьшается вращением резиновых валиков 16.
Затем производится подъем траверсы 3 до верха пазов вертикальных стоек 2, при этом пружины 21 растягиваются и натягивают канаты 17.
При дальнейшем подъеме устройства с отделенной частью листов опорные поверхности подкватных лап 12 спускаются с верхней части стопы листов. Под действием усилия сжатия пружин 21 через канаты 17 одни концы подхватных лап 12 входят в пазы С-образных скоб 11, а другие концы входят в промежуток между стопой и отдельной частью листов.
Переместив захватно-разделительное устройство с отделенной частью листов на место укладки, включают мотор-редуктор .4, вращательное усилие которого через механизмы винтгайка 5 и 6 и планки 7 преобразуется в усилие выдвигания из опоры 1 штоков 8 и жестко прикрепленного к ним захватного органа 9, выполненного в виде клина 10. Захватных орган 9 передает через тяги 13 созданное усилие на С-образные скобы 11 и связанные с ними подхватные лапы 12. С-образные скобы 11, подхватныв лапы 12 поворачиваются в шарнирах и выводятся из-под пачки листов до тех пор пока не установятся параллельно площадке 9 и укладываемой пачке листов и пока не коснутся штока конечного выключателя 23, отключающего моторредуктор 4. Захватно-раэделительное устройство, освобожденное от груза перемещается краном к стопе листов и весь цикл отделения, захвата и перемещения материала повторяется. Предлагаемое эахватно-разделитель |Ное устройство целесообразно использовать для складской переработки ме таллопродукции, в частности листов цветных металлов. Захватно-разделительное устройство можно использоват -для отделения, захвата и перемещения листового материала при штабелироваНИИ без подкладок. Использование устройства на складах листового проката позволит благодаря выполнению одного из захватных органов в виде С-образнЫх скоб с подхватными лапами значительно сок|ратить ручной труд при комплектовании листа потребителям, так как сдвигание и захват отделяемой части листов от стопы производится без применения ручного труда. Поворотные лапы обеспечивают надежность в эксплуатации, так как они предотвращают прогиб и выпадение нижних листов отделенной части стопы Наличие резиновых валиков на опорной раме предотвращает повреждение верхних листов в пачке. Формула изобретения Захватно-разделительное устройство, содержащее опору, захватные органы, 1СЗДИН из котор ос имеет высоту, меньшую высоты другого захватного органа, и выполнен в виде клина, и трособлочную систему, блоки которой закреплены на вторам захватном органе и один из концов троса которой соединен с петлей для навески на крюк грузоподъемной машины, отличающееся тем, что, с целью повышения производительности труда и надежности в эксплуатации, второй захватный орган включает в себя, по крайней мере, две шарнирно закрепленные на опоре скобы, соединенные посредством тяги с клином и снабженные шарнирно соединенными с ними подхватными лапами, которые соединены с другим концом троса, при этом блоки трособлочной системы закреплены на скобах и на опоре, а клин установлен с возможностью продольного перемещения относительно опоры от привода. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 131480, кл. В 66 С 1/32, 1960. 2.Авторское свидетельство СССР 591385, кл. В 66 С 1/32, 1976 (прототип).
ш
:-«%.
%
v .« $
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1973 |
|
SU645924A1 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| Захватное устройство | 1987 |
|
SU1493582A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Грузозахватное устройство | 1978 |
|
SU763234A1 |
| Кран | 1988 |
|
SU1523528A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватно-разделительное устройство | 1976 |
|
SU591385A1 |
| Захватное устройство для труб | 1989 |
|
SU1740302A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |