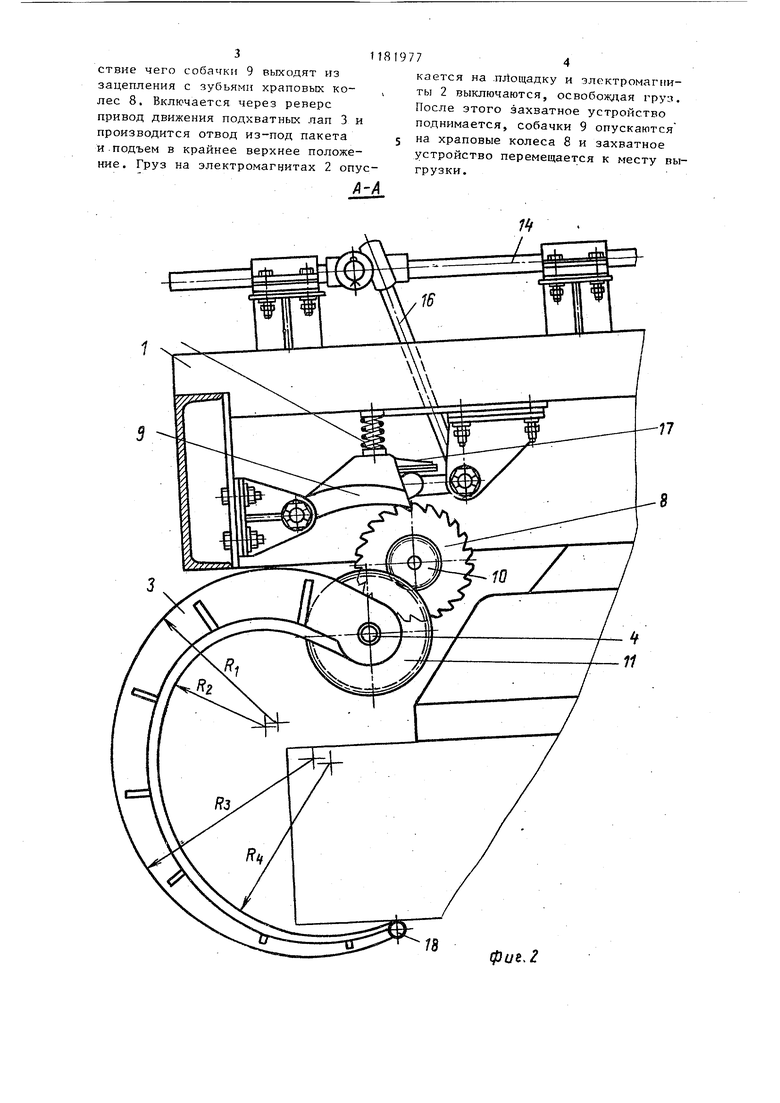
Изобретение относится к подъемно-транспортному машиностроению, а именно к грузозахватным устройствам ДД1Я пакетированных грузов, например листовой стали. Цель изобретения--повьпление удобства в.эксплуатации и расширение номенклатуры ахваёываемых гру.ЗОВ...4 На фиг,- 1 изображено устройство обирй вид; на фиг. 2 - разрез А-А на фиг. 1, на фиг, Б на фиг, 1; на фиг. 4 - узел установки LI --образного рычага на раме. I .. Захватное устройство содержит подвегииваемун) к грузоподьемной мапм яе раму 1, на которой смонтированы электромагниты 2 и подхватные лапы 5 расположенные симметрично относительно продольргой оси несущей рам Подхватные лапы 3, попарно соединенные между собой осью 4, получаю двгжение через два выходных вала редуктора 5, связанного с электродвигателем 6 приводного механизма-, смонтированного на несущей раме I, и шестерни 7 Устройство оборудовано механизMOf-; управления поворотом подхватнь Х лап., которьш взсгпочает храповые колеса 8, подпружиненн ые собачки, 9 и зубчааые колеса 10 и 11 с обратным переДс1точньЕ 1 числом, Механизм фиксации получает движение or дополнительного приводног механизма, включающего электродвиг тель 12 с двумя выходными валами, каж;иКт нз которых через передачу в1П1т-гайка 13 соедине с горизон тальной 1чтаигой 14 и через паралле лограмнн з Й четйгрехзиенник 15 с пов ротными L -образными рычагами 16, взаимодейстиующими с поворотными пллстинами 17 собачек 9, Подхватные лапы 3 выполнены в виде криволинейного бруса с радиусами переме ной кривизны Sl , 2 S J 4 соединены з нижней части опорными стержнями 18, расположенными вдоль несущей рамы Захватное устройство работает ел еду юцгим о б р а з ом с Захватное устройство подается к rvjecTy выгрузкя пакетов листовой стали. 1одхва( лапы 3 находятся в крайнем лерхл-тем иоосожении.. Захва нов устройстве опускается до сопри косяо1. егчт злектромагнитов 2 72 с верхним пакетом по центру. Вкиэтчаются электромагниты 2 и производится подъем пакета выше бортов полувагона. Затем включаются электродвигатели 6, которые через редукторы 5 и шестерни 7 приводят во вращение оси 4 с закрепленными на них подхватными лапами 3, соединенными через зубчатые колеса 10, 11 с храповыми колесами 8. Производится опускание и подвод подхватных лап 3 под пакет до соприкосновения опорных стержней 18 с нижней плоскостью пакета и с последующим его поджатием. Подхватная лапа 3, имеющая форму криволинейного бруса с радиусами переменной кривизны, обеспечивает захват пакетов различных размеров по ширине и толщине.. Во время опускания и подвода подхватных лап 3 горизонтальные штанги 14 механизма фиксации находятся в крайних положениях, параллелограммные четырехзвенники 15 сжаты, поворотные L -образные рычаги 16 выведены из взаимодействия с пластинами 17 собачек 9. Благодаря этому подпруисиненные собачки 9 находятся в нижнем положении в контакте с храповыми колесами 8, что дает возможность подхватным лапам 3 перемещаться вниз и под пакет5 но препятствует их отходу и автоматически фиксирует их в любом положении при подхвате пакета любого размера. Точность фиксации обеспечивается за счет увеличенной окружной скорости храповых колес 8, получаемой благодаря зубчатым колесам 10, 11 с обратным передаточным числом. После захвата пакета подхватнь1ми лапами 3 и их фиксации электромагниты 2 выключаются, и пакет на подхватных лапах 3. транспортируется к месту складирования, где опускается на высоту, обеспечивающую вьтод подхватных .лап 3 из-под пакета, затем включаются электромагниты 2. При этом подхватные лапы 3 и собачки 9 храповых рсолес 8 освобождаются от нагрузки.. Включается электродвигатель 12 и через передачи винтгайка 13 штанги 14 раздвигают параллелограммные четырехзвенНИКИ 15, которые вводят L -образные рр гчаги 16 во взаимодействие с поворотными пластинами 17 с.оПамок Q, в-глед3ствие чего собачки 9 выходят из зацепления с зубьями храповых колес 8. Включается через реверс привод движения подхватных лап 3 и производится отвод из-под пакета и подъем в крайнее верхнее положение. Груз на электромагнитах 2 опу
фиь.2 7 кается на .площадку и электромагниты 2 выключаются, освобождая rpyii. После этого захватное устройство поднимается, собачки 9 опускаются на храповые колеса 8 и захватное устройство перемещается к месту выгрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство для пакетированных грузов | 1988 |
|
SU1664716A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Захват для листовой стали | 1977 |
|
SU753772A1 |
| Захватное устройство | 1983 |
|
SU1222614A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Захватное устройство для плит | 1977 |
|
SU668868A1 |
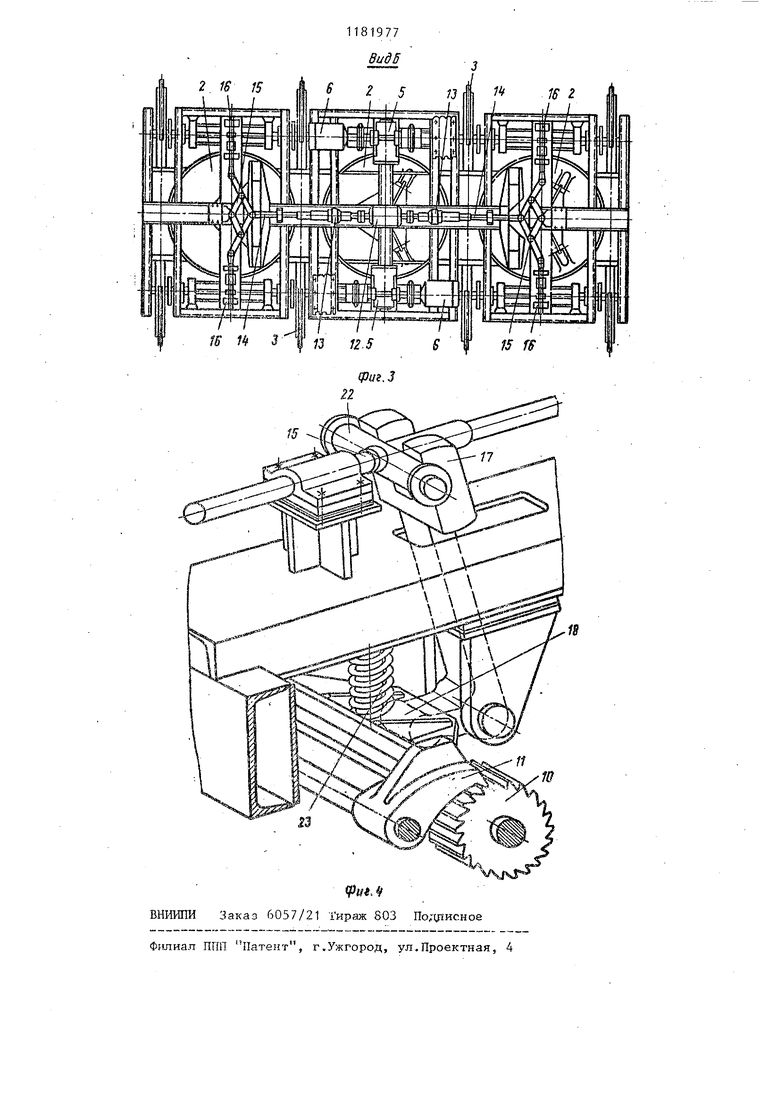
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее навешиваемую на грузоподъемную машину раму, закрепленны на ней с возможностью поворота посредством оси по крайней мере две пары приводных подхватных лап и ме ханизм управления поворотом лап, включающий смонтированное на корпу се и кинематически связанное с подхватными лапами храповое колесо J .2 18 , фии собачку и приводную штангу, установленную на раме с возможностью возвратно-поступательного перемещения, отличающееся тем, что, с целью повышения удобства в эксплуатации и расширения номенклатуры захватываемых грузов, оно снабжено жестко прикрепленной к собачке пластиной и шарнирно закрепленным на раме L -образным рычагом, который установлен с возможностью поочередного взаимодействия нижним плечом с пластиной, а верхним - со штангой, расположенной горизонтально, при этом собачка закреплена на корпусе и подпружинена относительно последнего, а кинематическая связь подхватных лап с храповымколесом представляет собой находящиеся в зацеплении зубчатые колеса, жёстко связанные соответственно с храповым колесом и осью поворота подхватной лапы.
| Грузозахватное устройство | 1978 |
|
SU664906A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
