(З) АВТОМАТИЧЕСКИЙ КЛЕЩЕВОЙ ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Клещевой захват | 1982 |
|
SU1054272A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство для монтажа строительных конструкций | 1974 |
|
SU557034A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |

1
Изобретение относится к области грузоподъемных механизмов, в частности к грузозахватным устройствам для транспортировки грузов, например труб, и может быть использовано при монтаже водоводов.
Известен автоматический клещевой захват, содержащий раму с поворотными захватными лапами, шарнирно связанными посредством тяг с несущей балкой, навешиваемой на крюк грузоподъемной машины, опорную плиту, смонтированную на вертикальных стойках, установленных на раме с возможностью возвратно-поступательного перемещения, и механизм фиксации захватных лап в раскрытом положении, вк.пючающий закрепленный на раме по крайней мере один крюк и установленную на несущей балке штангу с пальцем для взаимодействия с крюком 1 .
Однако известный захват недостаточно надежен в работе в связи с
тем, что в нем отсутствует принудительное взаимодействие пальца с крюком механизма фиксации.
Цель изобретения - повышение надежности захвата в работе.
Цель достигается тем, что в захвате механизм фиксации снабжен взаимодействующими с пальцем упругими крючками, закрепленными на раме, и шарнирно закрепленными на стойках толкателями, при этом крюк закреплен с возможностью поворота вокруг горизонтальной оси и подпружинен,а в несущей балке выполнено вертикальное отверстие, в котором установлена с возможностью ограниченного перемещения штанга.
Такое выполнение автоматического захвата обеспечивает принудительное взаимодействие пальца штанги с крюком механизма фиксации, что повышает надежность работы захвата.
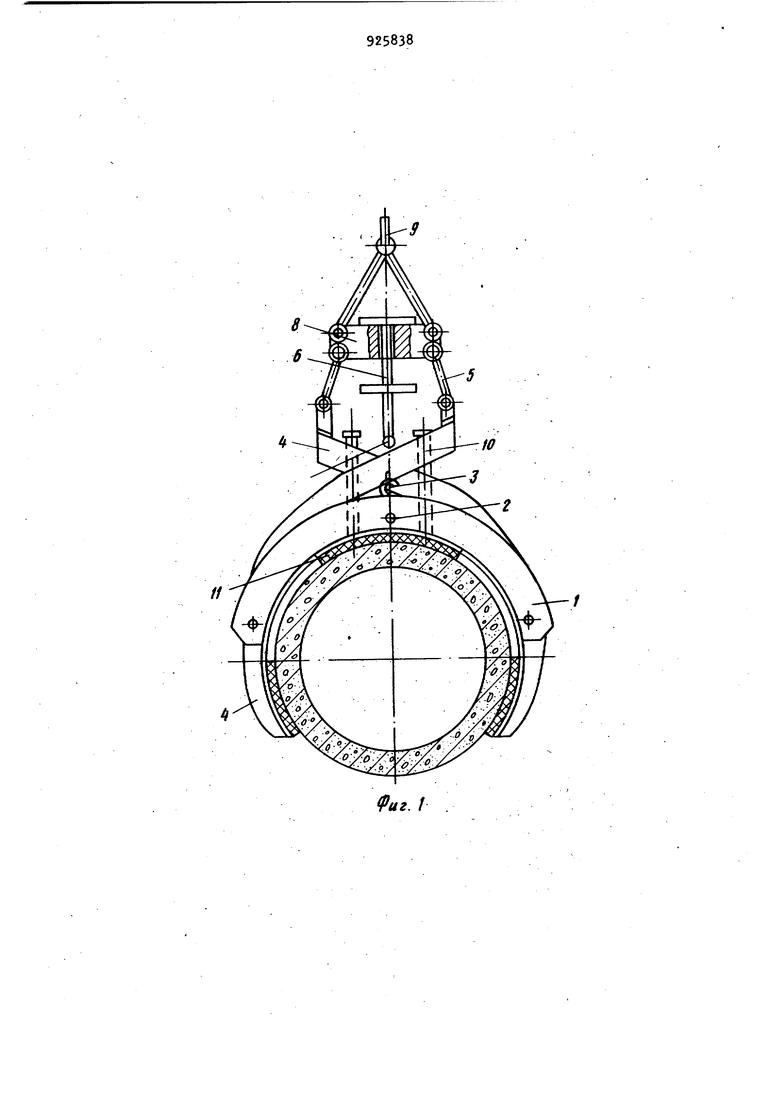
На фиг. 1 дан общий вид автоматического клещевого захвата; на
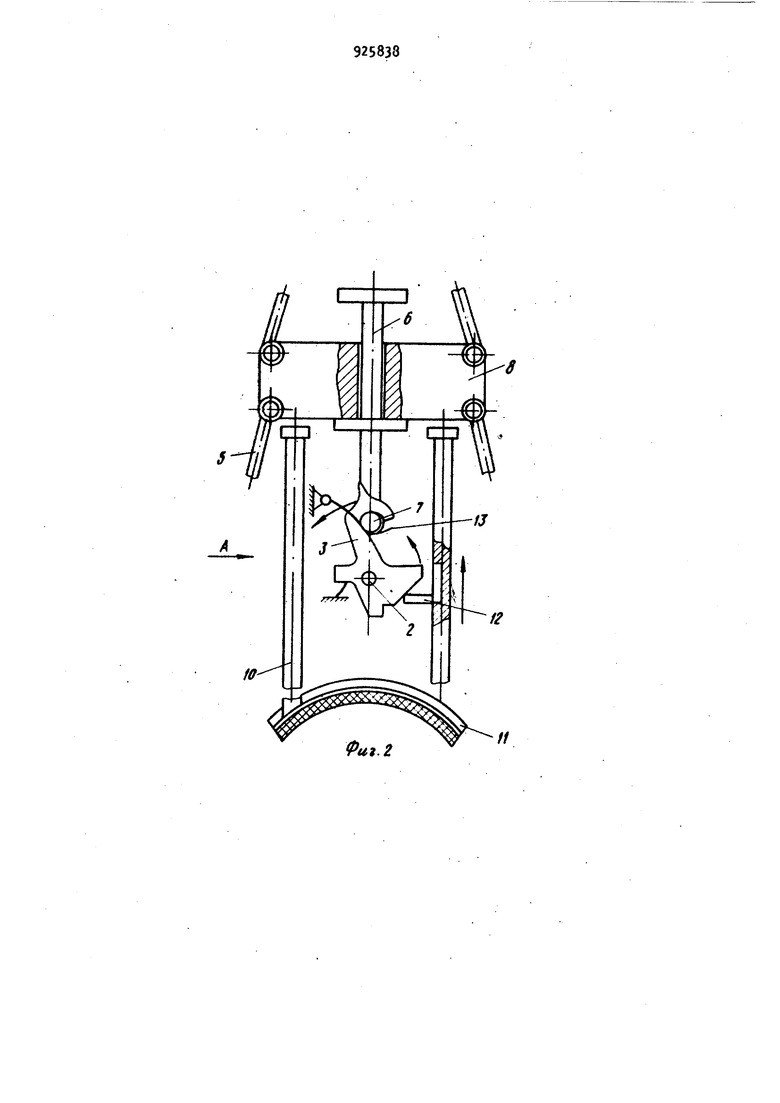
фиг. 2 - схема работы захвата в момент начала расстроповки; на фиг.З схема работы захвата в момент окончания расстроповки; на фиг. k - вид А на фиг.2.
Автоматический клещевой захват включает в себя раму 1 с шарнирно закрепленными на осях 2 подпружиненными крюками 3. поворотные захватные лапы , тяги 5 штангу б с пальцем 7 а также несущую б.алку 8, шарнирно соединенную с лапами 4 и грузозахватным кольцом Э для навешивания на крюк грузоподъемной машины. На вертикальных стойках 10, установленных на раме с возможностью возвратно-поступательного перемещения,смонтирована опорная плита 11 и шарнирно закреплены толкатели 12, а на раме 1 закреплены упругие крючки 13,предназначенные для вывода пальца 7 штанги 6 из-под крюков 3 в момент поворота их толкателями 12 и взаимодействующие с пальцем 7. В несущей балке 8 выполнено вертикальное отверстие, в котором установлена с возможностью ограниченного перемещения штанга 6..
Автоматический клещевой захват работает следующим образом.
Автоматический клещевой захват, навешенный на крюк грузоподъемной машины, находится в разгруженном состоянии - лапы раздвинуты и находятся в исходном положении (фиг.2), При этом штанга 6 пальцем 7 находится в зацеплении с крюками 3 и упругими крючками 13- При встрече с грузом стойки 10 перемещаются вертикально вверх относительно захвата. Толкатели 12 при встрече с крюками 3 (фиг.2) поворачивают их вокруг оси 2 против часовой стрелки. Одновременно стойки 10, соприкоснувшись с балкой 8, приподнимают ее на расстояние ДЧ (фиг.З). Когда толкатели 12 находятся в верхнем положении, несущая балка 8 поднимается, крюки 3 поворачиваются, штанга 6 освобождается от зацепления с крюками 3 и упругие крюки 13 приподнимают штангу на величину дх После этого крюки 3 посредством пружин занимают исходное положение.
При Дальнейшем натяжении тросов и подъеме кольца 9 происходит захват груза захватными лапами (фиг.1). Захват готов .к поднятию груза.
После касания грузом поверхности земли (транспортного средства) кольцо 9 совместно с захватными лапами и несущей балкой 8 движется вниз, палец 7 штанги 6 при этом скользит
по внешней стороне крюков 3 преодолевает усилие упругих крючков 13, поворачивает крюки 3 вокруг оси 2 и заходит в зацепление с ними. Захват разгружен и при поднятии его краном освободится от груза.
Данная конструкция захвата позволит осуществить автоматический надежный захват и расстроповку груза.
Формула изобретения
Автоматический кпёщевой захват, содержащий с поворотными захватными лапами, шарнирно связанными посредством тяг с несущей балкой, навешиваемой на крюк грузоподъемной машины, опорную плиту, смонтированную на вертикальных стойках, установленных на раме с возможностью возвратно-поступательного перемещения, и механизм фиксации захватных лап в раскрытом положении| включаю ций закрепленный на раме по крайней мере один крюк и установленную на несущей балке штангу с пальцем для взаимодействия с крюко 1, о т л ичающийся тем, что, с целью повышения надежности захвата в работе, механизм фиксации снабжен взаимодействующими с пальцем упругими крючками, закрепленными на раме, и шарнирно закрепленными на стойках толкателями, при этом крюк закреплен с возможностью .поворота вокруг горизонтальной оси и подпружинен, а в несущей балке выполнено вертикальное отверстие, в котором установлена с возможностью ограниченного перемещения упомянутая штанга.
Источники информации,
принятые во внимание при экспертизе
Риг. /
