Известны машины для погрузки штучных грузов в вагоны, представляюш,ие собой тележ1ку, на которой установлен конвейер, подаюш,ий груз к загрузочному конвейеру. Загрузочный конвейер смонтирован на опорной раме в -виде телескопических труб, раздвигаемых с помощью привода.
Отличием предлагаемой машины является То, что загрузочный конвейер оборудован дополнительными опорны.ми рамами для грузонесущего органа. Каждая из этих рам одним концом шарнирно смонтирована на соответствующей трубе, другой конец снабжен катками, перемещающимися по соседней дополнительной раме. Крайняя неподвижная дополнительная опорная рама смонтирована обоими концами на крайней неподвижной трубе.
Дополнительные опорные рамы связаны между собой цепными передачами, обеспечивающими движение грузонесущего органа. На конце каждой предыдущей рамы установлены ведущая и отклоняющие звездочки, огибаемые цепью, расположенной на последующей раме.
Это обеспечивает компактность машины и повышает надежность ее в работе.
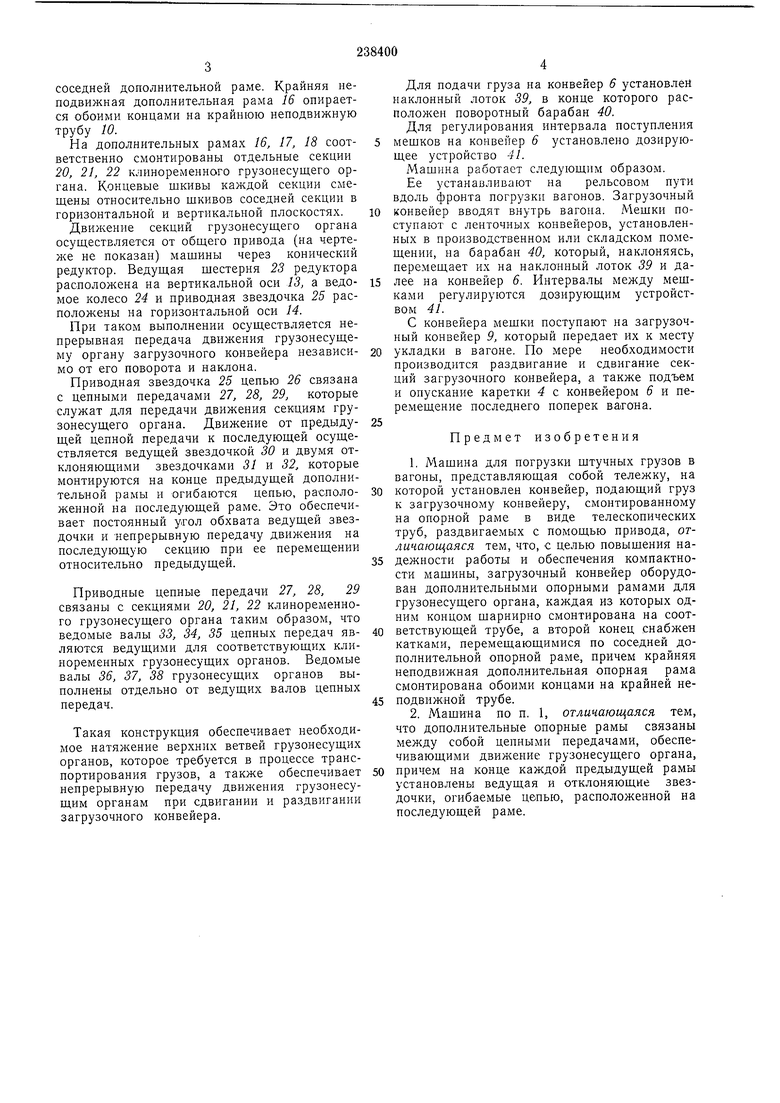
На фиг. 1 схематически изображена предлагаемая машина и ее разрез по А-Л; на фиг. 2 - вид по стрелке Б на фиг. 1; на
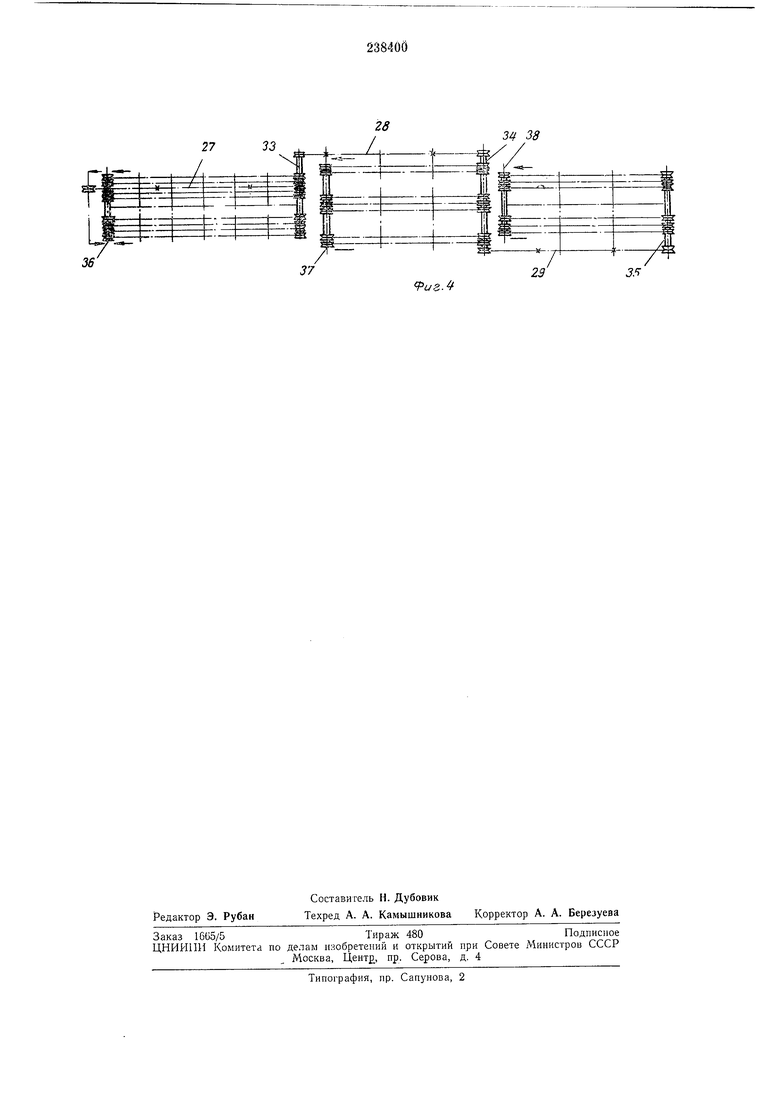
фиг. 3 - загрузочный конвейер при его сдвинутом положении, поперечный разрез; на фиг. 4 - схе.ма расположения цепных передач загрузочного конвейера.
Машина представляет собой тележку У, перемещающуюся по рельсам 2 вдоль фронта потрузки вагонов. На тележке установлены вертикальные стойки 3, по которым передвигается каретка 4, подвешенная с помощью гибкого органа 5. На каретке 4 установлен конвейер 6, перемещающийся по роликам 7 относительно каретки.
На раме 8 конвейера 6 смонтирован загрузочный конвейер 9, опорная рама которого выполнена в виде телескопических труб 10, 11, 12, раздвигаемых с помощью телескопического гидродомкрата (на чертеже не показан), установленного внутри труб.
Труба 10 установлена ма раме 8 с возможностью иоворота на 180° в горизонтальной плоскости относительно оси 13, а таклче может наклоняться относительно горизонтальной оси 14. Наклон осуществляется гидроиилиндром 15.
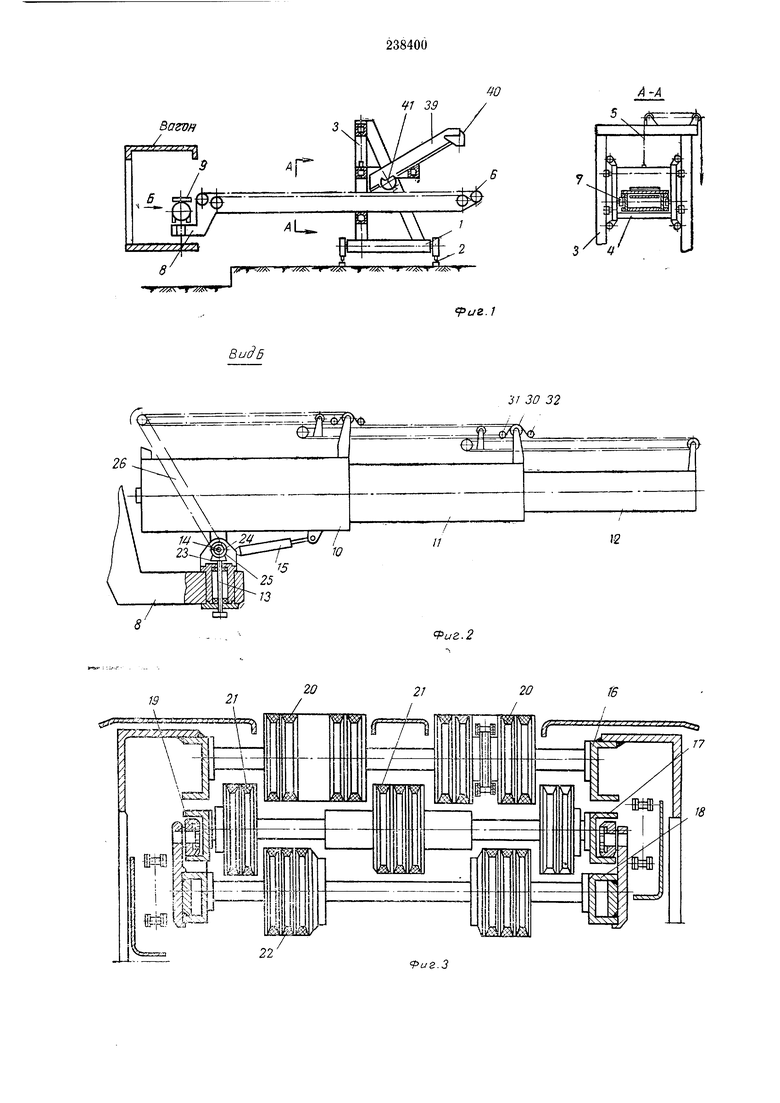
На телескопических трубах установлены дополнительные опорные рамы 16, 17, 18 загрузочного конвейера. Один конец каждой дополнительной рамы шарнирно смонтирован на соответствующей трубе, а другой конец снабжен катками 19, перемещающимися по
соседней дополнительной раме. Крайняя неподвижная дополнительная рама 16 опирается обоими концами на крайнюю неподвижную трубу 10.
На дополнительных рамах 16, 17, 18 соответственно смонтированы отдельные секции 20, 21, 22 клиноременного грузонесущего органа. Концевые шкивы каждой секции смещены относительно шкивов соседней секции в горизонтальной и вертикальной плоскостях.
секций грузонесуш,его органа осуш,ествляет€я от обш,его привода (на чертел е не показан) машины через конический редуктор. Ведущая шестерня 23 редуктора расположена на вертикальной оси 13, а ведомое колесо 24 и приводная звездочка 25 расположены на горизонтальной оси 14.
При таком выполнении осуществляется непрерывная передача движения грузонесущему органу загрузочного конвейера независимо от его поворота и наклона.
Приводная звездочка 25 цепью 26 связана с цепными передачами 27, 28, 29, которые служат для передачи движения секциям грузонесущего органа. Движение от предыдущей цепной передачи к последующей осуществляется ведущей звездочкой 30 и двумя отклоняющими звездочками 31 и 52, которые монтируются на конце предыдущей дополнительной рамы и огибаются цепью, расположенной на последующей раме. Это обеспечивает постоянный угол обхвата ведущей звездочки и непрерывную передачу движения на последующую секцию при ее перемещении относительно предыдущей.
Приводные цепные передачи 27, 28, 29 связаны с секциями 20, 21, 22 клиноременного грузонесущего органа таким образом, что ведомые валы 33, 34, 35 цепных передач являются ведущими для соответствующих клиноремеиных грузонесущих органов. Ведомые валы 36, 37, 38 грузонесущих органов выполнены отдельно от ведущих валов цепных передач.
Такая конструкция обеспечивает необходимое натяжение верхних ветвей грузонесущих органов, которое требуется в процессе транспортирования грузов, а также обеспечивает непрерывную передачу движения грузонесущим органам при сдвигании и раздвигании загрузочного конвейера.
Для подачи груза на конвейер 6 установлен наклонный лоток 39, в конце которого расположен поворотный барабан 40.
Для регулирования интервала поступления мешков на конвейер 6 установлено дозирующее устройство 41. Машина работает следующим образом. Ее устанавливают на рельсовом пути вдоль фронта погрузки вагонов. Загрузочный конвейер вводят внутрь вагона. Мешки поступают с леиточных конвейеров, установленных в производственном или складском иомещении, на барабаи 40, который, наклоняясь, перемещает их на наклонный лоток 39 и далее на конвейер 6. Интервалы между мешками регулируются дозирующим устройством 41.
С конвейера мещки поступают на загрузочный конвейер 9, который передает их к месту укладки в вагоне. По мере необходимости производится раздвигание и сдвигание секций загрузочного конвейера, а также подъем и опускание каретки 4 с конвейером 6 и перемещение последнего поперек вагона.
Предмет изобретения
1.Машина для погрузки штучных грузов в вагоны, представляющая собой тележку, на
которой установлен конвейер, подающий груз к загрузочному конвейеру, смонтированному на опорной раме в виде телескопических труб, раздвигаемых с помощью привода, отличающаяся тем, что, с целью повышения надежности работы и обеспечения компактности машины, загрузочный конвейер оборудован дополнительными опорными рамами для грузонесущего органа, каждая из которых одним концом шарнирно смонтирована на соответствующей трубе, а второй конец снабжен катками, перемещающимися по соседней дополнительной опорной раме, причем крайняя неподвижная дополнительная опорная рама смонтирована обоими концами на крайней неподвижной трубе.
2.Машина по п. 1, отличающаяся тем, что дополнительные опорные рамы связаны между собой цепными передачами, обеспечивающими двиясение грузонесущего органа,
причем на конце каждой предыдущей рамы установлены ведущая и отклоняющие звездочки, огибаемые цепью, расположенной на последующей раме.
Вагт}/
Т f K-frv.
А-А
хп
иг. 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический конвейер | 1985 |
|
SU1276580A1 |
| Конвейер для перегрузки штучных грузов | 1980 |
|
SU918194A1 |
| Машина для погрузки штучных грузов в вагоны | 1981 |
|
SU962154A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Перегрузочное устройство для стеллажных складов | 1983 |
|
SU1146240A1 |
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1999 |
|
RU2194662C2 |
| МАШИНА ДЛЯ ПОГРУЗКИ МЕШКОВ В КРЬИЫЕ ЖЕЛЕЗНОДОРОЖНЫЕ ВАГОНЫ | 1969 |
|
SU236311A1 |
| ЗАГРУЗКИ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ШТУЧНЫМИ и СЫПУЧИМИ ГРУЗАМИ | 1965 |
|
SU174126A1 |
| Погрузочная машина для штабелирования в железнодорожных вагонах загруженных мешков | 1958 |
|
SU116200A1 |
| Телескопический конвейер | 1985 |
|
SU1276579A1 |
61 30 32
12
иг.2
