Изобретение относится к подъемно-транспортному машиностроению и может найти применение для перемещения тарно-штучных грузов при производстве технологических, погрузочно-разгрузочных и транспортноскладских операций в различных отраслях народного хозяйства.
Целью изобретения является расширение технологических возможностей конвейера путем обеспечения постоянной скорости транспортирования.
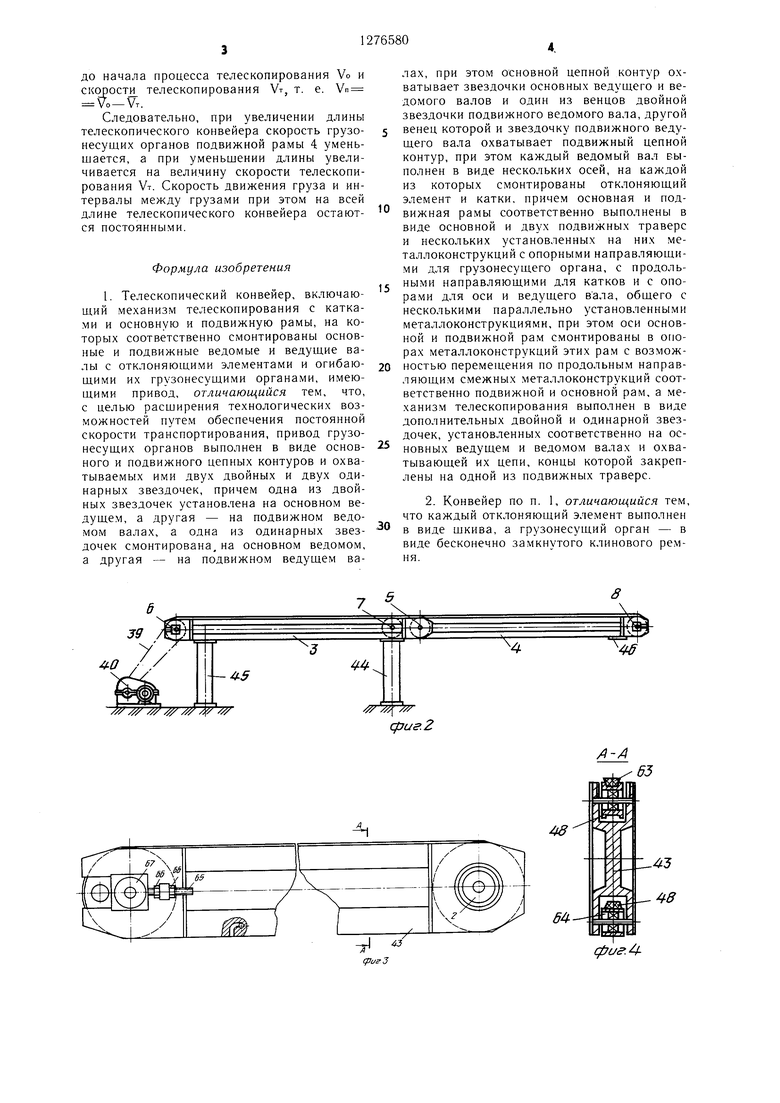
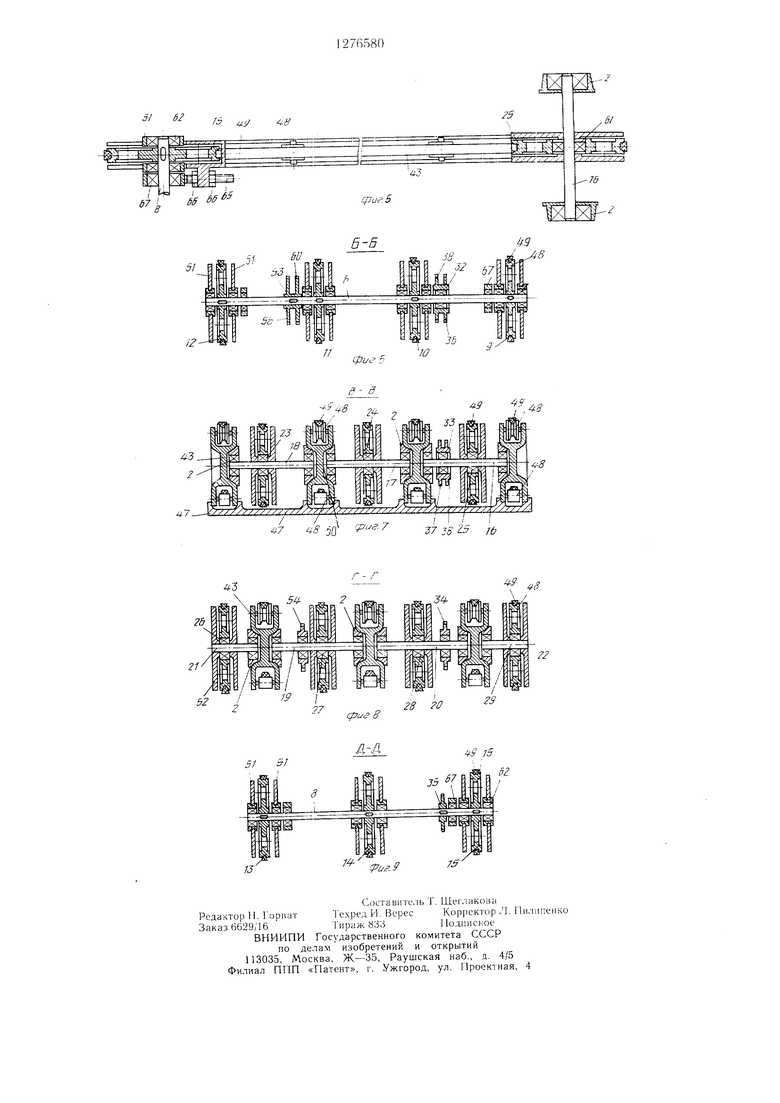
На фиг. 1 изображен телескопический конвейер, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - металлоконструк-. ция, вид сбоку; на фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 - металлоконструкция вид сверху; на фиг. 6 - сечение Б-Б на фиг. I; на фиг. 7 - сечение В-В на фиг. 1; на фиг. 8 - сечение Г-Г на фиг. 1; на фиг. 9 - сечение Д-Д на фиг. 1
Телескопический конвейер включает механизм телескопирования 1 с катками 2 и основную 3 и подвижную 4 рамы. На основной раме 3 смонтированы основные ведомый 5 и ведущий 6 валы, а на подвижной раме 4 смонтированы подвижные ведомый 7 и ведущий 8 валы. На основном 6 и подвижном 8 ведущих валах смонтированы отклоняющие элементы в виде щкивов 9-15, а основной 5 и подвижный 7 ведомые валы выполнены в виде нескольких осей 16-22, на каждой из которых смонтированы отклоняющие элементы в виде щкивов 23-29, при этом на одном из концов крайних осей 21 и 22 смонтировано по одному катку 2, а на всех остальных осях 16-20 катки 2 установлены на обоих их концах. Привод грузонесущих органов выполнен в виде основного 30 и подвижного 31 цепных контуров и охватываемых ими двух двойных 32 и 33 и двух одинарных 34 и 35 звездочек. Двойная звездочка 32 установлена на основном ведущем валу 6, а двойная звездочка 33 установлена на оси 16 подвижного ведомого вала 7. Одинарная звездочка 34 установлена на оси 22 основного ведомого вала 5, а одинарная звездочка 35 смонтирована на подвижном ведущем валу В. Основной цепной контур 30 охватывает венец 36 двойной звездочки 32, венец 37 двойной звездочки 33 и одинарную звездочку 34, а подвижный цепной контур 31 охватывает венец 38 двойной звездочки 33 и одинарную звездочку 35. Венец 38 двойной звездочки 32 через цепную передачу 39 и редуктор 40 связан с двигателем 41. Основная рама 3 выполнена в виде основной траверсы 42 и смонтированных на ней нескольких параллельных металлоконструкций 43, опирающихся на опоры 44 и 45. Подвижная рама 4 выполнена из двух подвижных траверс 46 и 47, на которых установлены металлоконструкции 43. Каждая металлоконструкция 43 имеет опорные направляющие 48 для грузонесущих органов в виде бесконечно замкнутых клиновых ремней 49, продольные направляющие 50 для катков 2 и опоры 51 и 52 для ведущего вала 6 или 8 и для одной из осей 16-22, которые на катках 2 могут перемещаться по продольным направляющим 50 смежных металлоконструкций 43.
Механизм телескопирования 1 выполнен в виде дополнительных двойной звездочки 53 и одинарной звездочки 54, установленных соответственно на основных ведущем 6 и ведомом 7 валах и охватывающей их цепи 55 концы которой закреплены на подвижной траверсе 47, при этом один венец 56 дополнительной двойной звездочки 53 охватывает цепная передача 57, связывающая ее через редуктор 58 и с двигателем 59, а другой венец 60 охватывается цепью 55.
На одном конце одной из металлоконструкций 43 неподвижно установлена, например, ось 16, на которой на подщипниках качения 61 установлены, например, ведомый шкив 25 и опорные катки 2. На другом конце одной из металлоконструкций 43 через опорные подшипники 62, установленные в опорах 51, смонтирован, например, подвижный приводной вал 8 с жестко закрепленным на нем, например, шкивом 15. Грузонесущий элемент в виде бесконечно замкнутого клинового ремня 49 огибает шкивы 25 и 15 и опирается на рабочей 63 и на холостой 64 ветвях на опорные направляющие 48. Винт 65 с гайками 66 и подшипником 67 служит для натяжения бесконечно замкнутого клинового ремня 49.
Телескопический конвейер работает следующим образом.
Двигатель 41 через цепную передачу 39 и двойную звездочку 32 вращает основной вал 6 с установленными на нем щкивами 9-12. Одновременно двойная звездочка 32 передает вращение на основной контур 30, двойную звездочку 33 и подвижный цепной контур 31 которые приводит во вращение подвижный ведущий вал 8 со шкивами 13-15. Бесконечно замкнутые клиновые ремни 49 всех металлоконструкций 43 двигаются с одинаковой скоростью. Для изменения длины телескопического конвейера включается двигатель 59, который через редуктор 58, цепную передачу 57 и дополнительную двойную звездочку 43 приводит в движение цепь 55, которая через подвижную траверсу 47 начинает перемещать подвижную раму 4. При перемещении подвижной рамы 4 вместе с ней перемещается и двойная звездочка 33 вдоль основного, цепного контура 30. В результате этого скорость движения грузонесущих органов подвижной рамы 4 при телескопировании VT равна разности векторов скорости движения грузонесущих элементов
до начала процесса телескопирования Vo и скорости телескопирования VT, т. е.
Vo -VT.
Следовательно, при увеличении длины телескопического конвейера скорость грузонесущих органов подвижной рамы 4 уменьшается, а при уменьшении длины увеличивается на величину скорости телескопирования VT. Скорость движения груза и интервалы между грузами при этом на всей длине телескопического конвейера остаются постоянными.
Формула изобретения
1. Телескопический конвейер, включающий механизм телескопирования с катками и основную и подвижную рамы, на которых соответственно смонтированы основные и подвижные ведомые и ведуш,ие валы с отклоняющими элементами и огибающими их грузонесущими органами, имеющими привод, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения постоянной скорости транспортирования, привод грузонесущих органов выполнен в виде основного и подвижного цепных контуров и охватываемых ими двух двойных и двух одинарных звездочек, причем одна из двойных звездочек установлена на основном ведущем, а другая - на подвижном ведомом валах, а одна из одинарных звездочек смонтирована, на основном ведомом, а другая - на подвижном ведущем валах, при этом основной цепной контур охватывает звездочки основных ведущего и ведомого валов и один из венцов двойной звездочки подвижного ведомого вала, другой венец которой и звездочку подвижного ведущего вала охватывает подвижный цепной контур, при этом каждый ведомый вал выполнен в виде нескольких осей, на каждой из которых смонтированы отклоняющий элемент и катки, причем основная и подвижная рамы соответственно выполнены в виде основной и двух подвижных траверс и нескольких установленных на них металлоконструкций с опорными направляющими для грузонесущего органа, с продольными направляющими для катков и с опорами для оси и ведущего вала, общего с несколькими параллельно установленными металлоконструкциями, при этом оси основной и подвижной рам смонтированы в опорах металлоконструкций этих рам с возможностью перемещения по продольным направляющим смежных металлоконструкций соответственно подвижной и основной рам, а механизм телескопирования выполнен в виде дополнительных двойной и одинарной звездочек, установленных соответственно на основных ведущем и ведомом валах и охватывающей их цепи, концы которой закреплены на одной из подвижных траверс.
2. Конвейер по п. 1, отличающийся тем, что каждый отклоняющий элемент выполнен в виде шкива, а грузонесущий орган - в виде бесконечно замкнутого клинового ремня.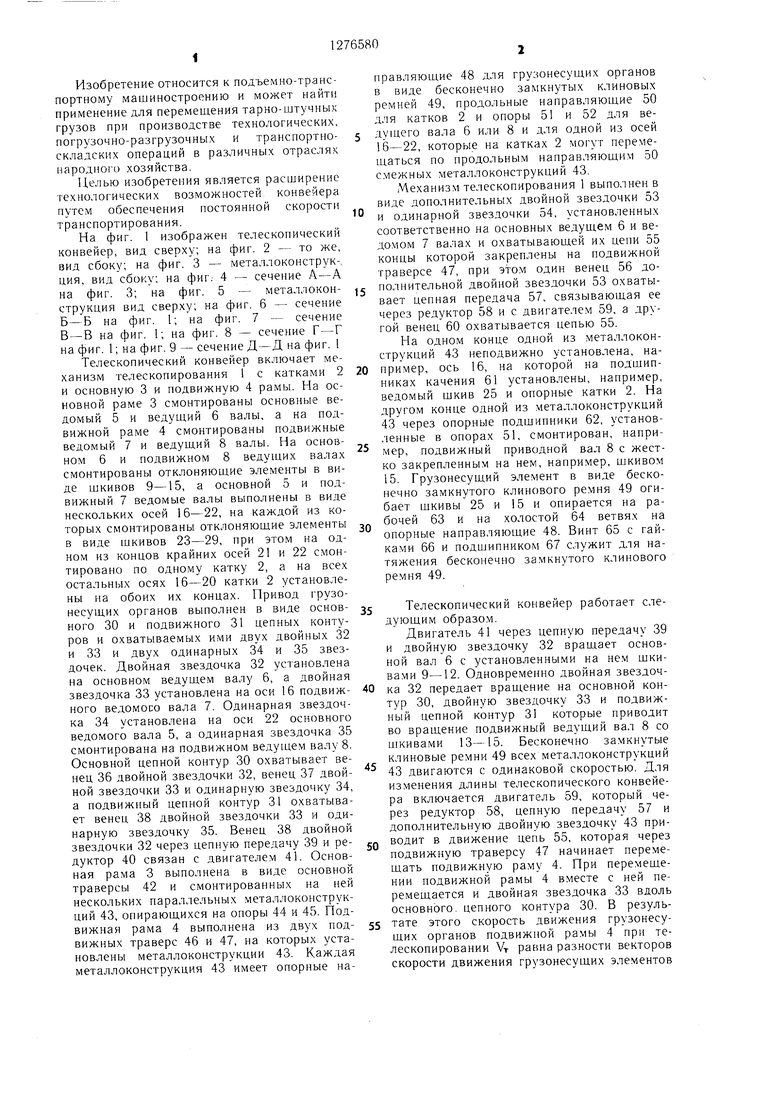
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический конвейер | 1981 |
|
SU1027106A1 |
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1969 |
|
SU238400A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Крутонаклонный конвейер | 1987 |
|
SU1502431A2 |
| Подающее устройство бамбуковых заготовок | 1987 |
|
SU1523344A1 |
| Вертикальный цепной конвейер | 1990 |
|
SU1776247A3 |
| Поперечный конвейер | 1981 |
|
SU1008100A1 |
| Ленточный конвейер | 1983 |
|
SU1077824A1 |
| Телескопический конвейер | 1985 |
|
SU1276579A1 |
| Устройство для извлечения бутылок из ящиков | 1973 |
|
SU448149A1 |
Изобретение относится к подъемнотранспортному маншностроению и позволяет расп1ирить техпологическпе воз.можности путем обеспечения постояппой скорости транспортирования. Д.1я этого при сборе телескопического конвейера (ТК) подвижная рама (ПР) .монтируется на подвижный ведущий вал 8 со шкивами 13-15. Одновременно основная рама (ОР) монтируется на основной ведупшй вал 6 со шкивами 9-12. В месте соединения ОР и ПР устанавливают катки по одному на оси 21 и 22 и попарно на оси 16-20. В результате такого соединения обеспечивается пере.мещение ПР относительно ОР по продольным направляюпхим смежны.х металлоконструк щй. При этом неремен1ение осуществляется от двигателя 41. Двигатель 41 через редуктор 40, непную передачу (ЦП) 39 и двойную звездочку 32 вращает основной вал 6. Одновременно двойная звездочка 32 передает врап1ение на основной цепной контур 30, двойную звездочку 33 и подвижный цепной контур 31. Далее вращение передается на подвижный ведущий вал 8. При этом постоянная скорость транспортирования достигается изменением длины ТК. Для этого включают двигатель 59, который через редуктор 58, ЦП 57 и дополн1 те,1ьную двойную звездочку 53 приводит в движение пень 55, концы которой закреплены на траверсе ПР. Цепь 55 через подвижную траверсу 47 перемещает ПР. Вместе с ПР вдоль основного цепного контура 30 перемеп;ается двойная звездочка 33, связывающая основной цепной контур 30 и подвижный ценной контур 31. При Ф такой кинематической связи цепных контуров 30 и 31 скорость двпження грузонесущих (Л органов Vn ПР при телескопировании равна разности векторов скорости движения до начала телеско пирования Vo и скорости телескопирования VT. При этом грузонесущий орган выполнен в виде бесконечно замкнутого к,1инового ремня. Таким образом при ю увеличении длины ТК уменьшается Vn, а при y ieпынeнии длины ТК увеличивается Vii на величину т. При этом скорость Oi движения грузов и интервалы между ними ел но всей длине ТК остаются постоянными. 00 1 3. п. ф-лы, 9 ил. Cpue.i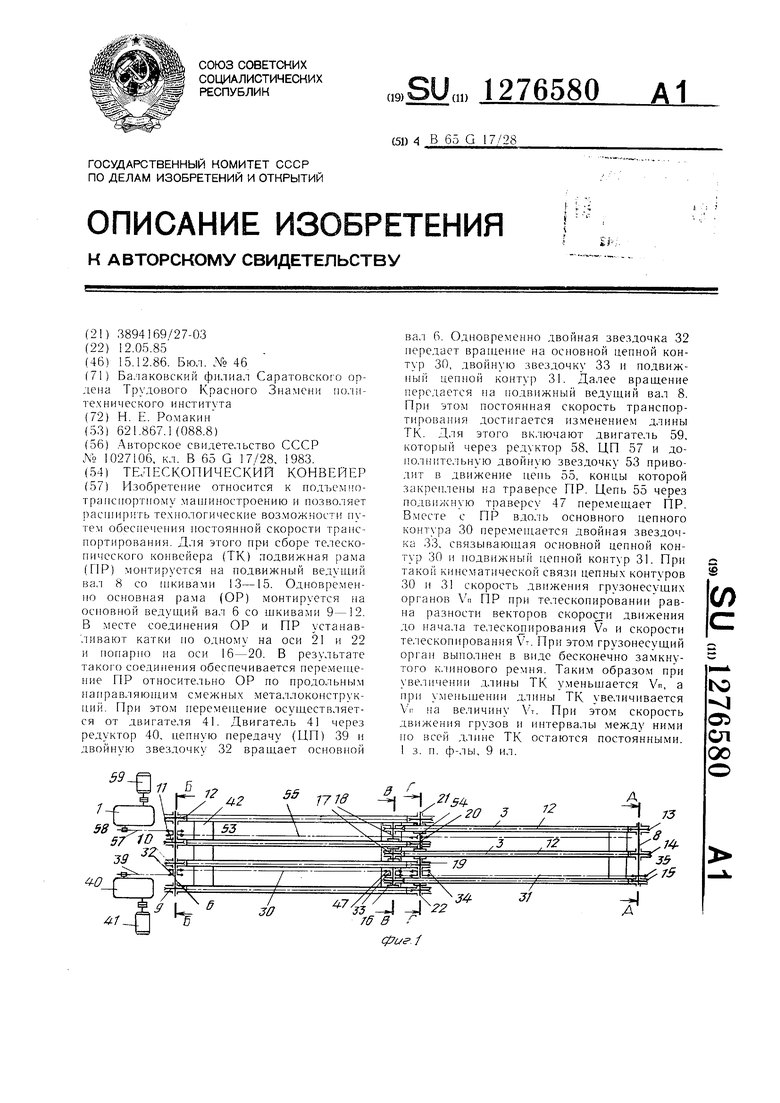
ери г. 2
(f us:f4
| Телескопический конвейер | 1981 |
|
SU1027106A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
