Изобретение относится к оборудованию для транспортирования грузов при погрузочно-разгрузочных операциях и может быть использовано для погрузки мясных нОопутун в автотранспорт.
Цель изобретения - повышение надежности.
На фиг. 1 изображен предлагаемый телескопический конвейер; на фиг. 2 -- то же. вид сверху.
Телескопический копвейер состоит из каркаса 1, по вертикальным направляющим 2 которого может перемещаться подвижная п..патформа 3 с закрепленными на ней осями, где средняя ось имеет пару тросовых блоков 4, а две оси расположены симметрично от нее - по паре цепных блоков 5. Все блоки подвижной платформы установлены на подшинниках. На верхней части каркаса жестко закреплена стационарная платформа 6. На пей установлеп в подшипниках ведущий вал 7 с закрепленными на нем цеппыми блоками 8, приводимыми во вращение приводом 9 грузонесущего органа. В средней части стационарной платформы закреплена ось 10 с установленными на ней в подшипниках двумя парами цепных 8 и тросовых 11 блоков, причем последние установлены с сторон от ценньих блоков. Симметрично 15едущему валу относительно описанной оси расположена еще одпа ось 12 с парой цепных блоков.
В верхней части каркаса также закренлена лебедка 13, служащая д.1Я по.;1ьема сложенных телескопических секций в вертикальное положение при помощи троса 14.
На нижней площадке каркаса установлены привод тросовых барабанов 15 и компенсирующие блоки 16, служащие для постоянного натяжения троса при его перераспределении. Такую же функцию для грузонесущего органа выполняет установленная на подвижной натяжной оси пара цепных блоков 17. На пути прохождения тросов и цепей имеются закрепленные на каркасе 1 направляющие цепные 18 и тросовые 19 блоки. В состав грузонесущего органа ВХО.ДЯТ стационарная 20, средняя 21 и концевая 22 нодвижные секции, смонтированные с возможностью телескопического перемещения относительно друг друга. Нричем стационарная секция 20 щарнирно закреплена относительно нижней части каркаса 1 своими цапфами 23 в установленных на стойках каркаса I подщипниках 24. Кроме того, стациопарная секция 20 имеет регулируемые опоры 25, а также направляюп1ие 26 от провисания грузопесущего органа, в который входят две параллельные цепи 27 с п арнирно закрепленными между собой траверсами 28. Средняя 21 и концевая 22 секции имеют направляющие ролики 29, при помощи которых происходит перемещение секций 21 и 22 относительно друг друга. Концевая секция
22 имеет закрепленную ось 30 с двумя цепными блоками и щарнирно установленный откидной рольганг 31. Телескопический конвейер имеет схему тросовой запасовки, являющуюся механизмом выдвижения подвижных секций, и схему запасовки цепей грузонесущего органа.
В схему тросов.ой запасовки входят привод в виде тросовых барабанов 15, представляющий из себя двухбарабанную реверсивную лебедку, причем каждый барабан лебедки разделен перегородкой поровну на внутреннюю сторону (ближайшую к редуктору) и внешнюю (с противоположной навивкой). На внутренних сторонах барабанов 15 лебедки намотаны и крепятся тросы 32, свободные концы которых закреплены к концевой секции 22.
На внещних сторонах барабанов 15 также крепятся тросы 33, свободные концы которых, проходя че)ез направляющие 19 и тросовые блоки 11 и 4 стационарной и подвижной платформ 6 и 3, крепятся к верхней части стационарной платформы 6.
Пара тросов 34, закрепленных на основной секции 20, проходя через направляющие блоки 35 второй секции 21, крепится к пачалу копцевой секции 22. Еще одна пара тросов 36 крепится на нижней части подвижной платформы 3 и, проходя через направляющие 19 и компенсирующие 16 блоки и далее через блоки 37 стационарной секции 20, крепится к началу секции 21.
В схему запасовки грузонесущего органа входят непрерывно замкнутые параллельные цепи, соединенные щарнирно через определенный шаг с траверсами 28. Цепи 27 про ходят через цепные блоки внешнего контура телескопического конвейера и имеют двухкратную запасовку в двух парах цепных блоков 5 подвижной платформы 3. Таким образом, имеются две схемы запасовки, условно передаточные числа которых равные между собой, так как краткость полиспаста грузонесущего органа равна краткости выдвижных секций, связанных между собой тросовой запасовкой по схеме одновременного выдвижения. Кроме того, делительные окружности цепных 5 и тросовых 4 блоков подвижной платформы 3 равны.
Разница, возникающая при перераспреде.1епии длин грузопесущего органа относительно тросов и наоборот, например, при подъеме секции в вертикальное положение, выбирается автоматически подпружиненной натяжкой с цепными блоками 17 натяжепия грузонесущего органа и компенсирующими блоками 16 натяжения тросов.
Перемещение выдвиж.ных секций 21 и 22 вместе с грузонесушим органом находится в прямой зависимости от перемещений подвижной платформы 3 и достигается путем включения привода тросовых барабанов 15.
Конвейер работает следующим образом.
Перед началом погрузочных работ производится необходимое выдвижение телескопических секций 21 и 22 до появления рольганга 31 концевой секции 22 в зоне загрузки фургона автомобиля. Для осуществления этой операции через пульт управления включают привод тросовых барабанов. Происходит вертикальный подъем подвижной платформы 3 и соответственно одновременное равномерное перемещение средней 21 и концевой 22 секций относительно основной и друг друга вместе с грузонесущим органом.
Подготовив конвейер к работе, включают привод 9 грузонесущего органа, траверсы которого, перемещаясь по поверхности секции 20, 21 и 22, захватывают опущенную с подвесного пути полутущу и доставляют ее на концевой рольганг 31. По мере заполкения фургона производят цикличное включение привода тросовых барабанов 15 и задвижение секций вплоть до исходного положения. В конце работы при необходимости складывают концевой рольганг 31 и включают лебедку 13 для подъема сдвинутых секций 21 и 22 в вертикальное положение, например, для освобождения территории рампы и пр.
Формула изобретения
Телескопический конвейер, включающий смонтированную на каркасе стационарную
и установленную под ней подвижную платформы с цепными блоками, огибающий последние приводной грузонесущий орган, стационарную и подвижные, среднюю и концевые секции телескопической рамы и механизм выдвижения подвижных секций с приводом, отличающийся тем, что, с целью повыщения надежности, подвижная и стационарная платформы снабжены тросовыми блоками, одни из которых, смонтированные
0 на стационарной платформе, установлены соосно цепным блокам с внещней их стороны, а привод механизма выдвижения подвижных секций выполнен в виде двухбарабанной реверсивной лебедки, каждый барабан которой
разделен перегородкой и имеет две противоположно направленные навивки, при этом механизм выдвижения подвижных секций выполнен в виде смонтированных на стационарной и подвижной средней секциях направляющих блоков и системы тросов,
одни из которых намотаны на барабан и крепятся к нему и концевой подвижной секции, другие намотаны на барабан, охватывают тросовые блоки стационарной и подвижной платформ и крепятся к последней, третьи закреплены концами на стационарной и концевой секции и охватывают направляющие блоки подвижной средней секции, а четвертые закреплены концами на подвижной платформе и подвижной средней секции и охватывают направляющие блоки стационарной секции.

| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический ленточный конвейер | 1988 |
|
SU1680596A1 |
| Телескопический ленточный конвейер | 1980 |
|
SU908672A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ТРАНСПОРТЕР | 1991 |
|
RU2036125C1 |
| Телескопический ленточный конвейер | 1979 |
|
SU825394A1 |
| ОЧИСТНОЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА | 2006 |
|
RU2323339C2 |
| Телескопический складской кран | 1975 |
|
SU662003A3 |
| Платформа с механизмом погрузки для перевозки миномета | 2024 |
|
RU2841415C1 |
| Телескопический ленточный конвейер | 1980 |
|
SU925788A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 1990 |
|
RU2014766C1 |
Изобретение относится к оборудованию для транспортирования грузов при погрузочно-раз1рузочны. операциях и может быть использовано для погрузки мясных полутуш в автотранспорт. Цель изобретения - повышение надежности. Конвейер включает смонтированную на каркасе 1 стационарную 6 и установленную под ней подвижную З платформы (П) с цепными и тросовыми блоками и приводной грузонесущий орган (ГО), огибающий цепные блоки. Тросовые блоки, смонтированные на П 6, установлены соосно цепным блокам с внешней их стороны. В состав ГО в.ходят стационарная 20 и подвижные средняя 21 и концевая 22 секции (С) телескопической рамы. Привод механизма выдвижения С 21 и 22 выполнен в виде двухбарабанной реверсивной лебедки. Каждый барабан 15 лебедки разделен перегородкой и имеет две противоположно направленные навивки. Механизм выдвижения С 21 и 22 выполнен в виде смонтированных на С 20 и 21 направляющих блоков и системы тросов. Одни из тросов намотаны на барабан и крепятся к нему и С 22, другие намотаны на барабан и охватывают тросовые блоки П 3 и 6 и крепятся к П 3. Третьи закреплены концами на С 20 и 22 и охватывают направляющие блоки С 21. Четвертые закреплены концами на П 3 и С 21 . и о.хватывают направляющие блоки С 20. Перед нача,1ом работ с помощью привода // механизма выдвижения С 21 и 22 проис- / ходит вертикальный подъем П 3 и одновременно равномерное перемещение С 21 и 22 относительно С 20 и друг друга вместе с ГО. Это повышает надежность работы. 2 ил. 5 ьо 05 ел со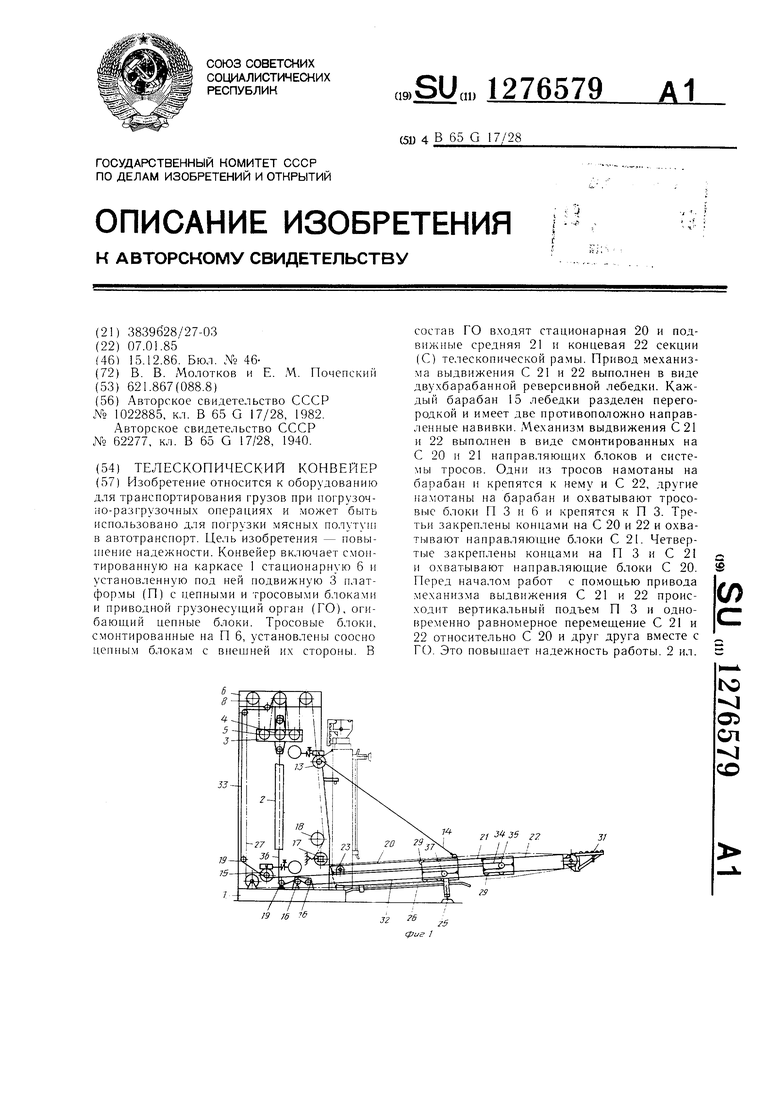
Ф
| Телескопический конвейер | 1982 |
|
SU1022885A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Машина для выгрузки сыпучих материалов из крытых железнодорожных вагонов | 1940 |
|
SU62277A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
