Известны электромеханические программные устройства, iB которых осуществляется дистанционное изменение длительности циклов программы.
Предложенное устройство отличается от известных применением мехаиизмов дистанционного фор1МирО|Вания долговременных и краткоВременных «оманд, не зависящих от длительности цикла отрабатываемой програм-мы.
Это обеспечивает возможность дистанционного формирования Кратковременных команд постоянной дла-1тельности и заданной скважности и долговременных команд задаиной длительности, не зависящей от длительности цикла программы.
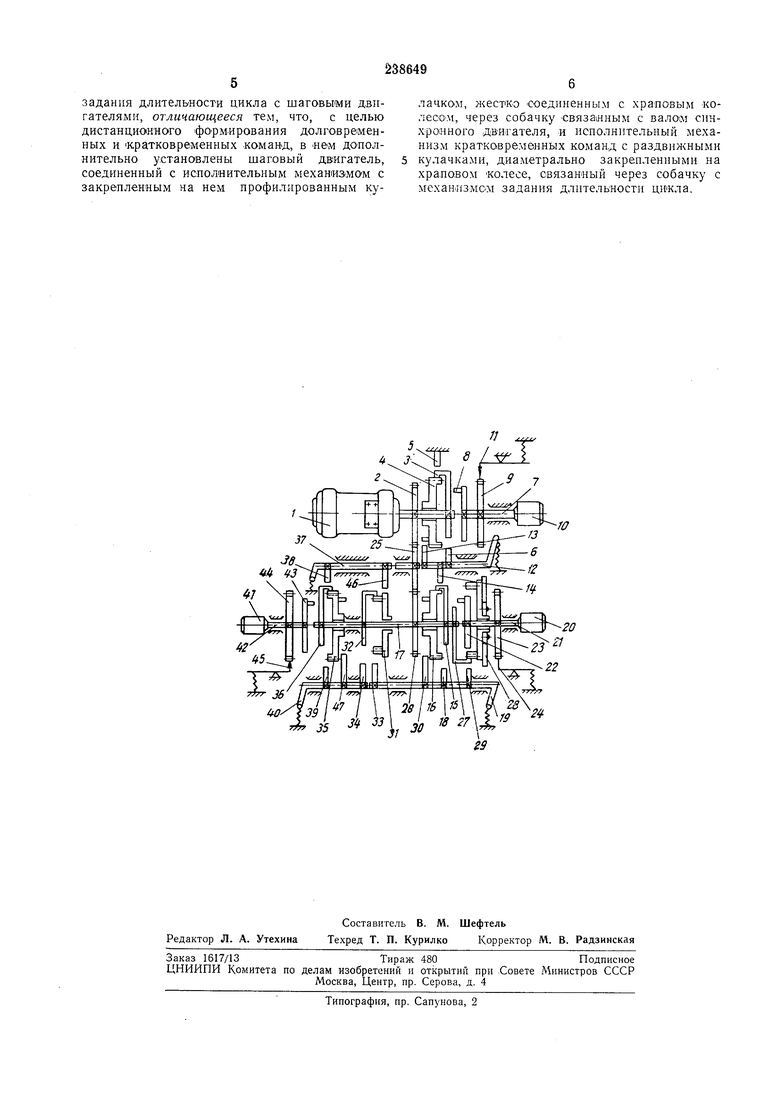
На чертеже показана кинематическая схема устройства.
На валу синхронного двигателя / жестко посажены щестерня 2 и собачка 3, служащая для поворота храоового колеса 4, свободно сидящего на валу двигателя.
Для сцепления собачки 3 с храповым колесом 4 установлен упор 5, а для расцепления - упор 6. Упоры 5 и 6 настраиваются таким образОМ, что на один оборот вала двигателя храповое колесо 4 поворачивается на один зуб, т. е. ведется отработка nporpaiMMbi, установленной задающим механизмам первой ступени длительности цикла.
Задающий механизм состоит из валика 7, задающего упора S, служащего для расцепления собачки 3, и, следовательно, остановки храпового колеса 4 в заданном положении, цилиндрической щестерни 9, исполнительного двигателя 10 (например, щагового) и устройства 1 для фиксации положения задающего упора.
На распределительном валике 12 установлены рычаг 13 длv поворота валика 12, упор 14 для сцепления собачки 15 с храповым колесом 16, свободно с; дящим на главном валике 17. Для расцепления собачки /5 с храповым колесом 16 имеется упор 18, установленный иа распределительном валлке 19. Упоры 14 и IS настраиваются таким образо:м, что за один оборот главного валика /7 храповое колесо поворачивается на один зуб, т. е. 1ведется отработка пpoгpa iмы, установленной задающим механизмом второй ступени длительности цикла. Последний состоит из сполнительного двигателя (например, шагового) 20, валика 21, на котором жестко закреплены задающий
упор 22 для расцепления собачки 15 и, следовательно, остановки храпового колеса 16 в заданном положении, и цилиндрическая щестерня 23. Для фиксации цоложен 1я задающего упора 22 предусмотрено фиксирующее устройПередача вращения от двигателя -к главному валику Г/ осуществляется шестернями 2, 2д и 26 с .передаточным числом г 1.
На главном валике 17 закреплена собачка 27, служащая для поворота исполнительното оргала 28 ла угол 180. Исполнительный орган 2в обеспечивает подачу коротких команд (импульсов) постоянной длительности (25-H.iuu мсек).
Короткие команды постоянной длительности создаются диаметрально расположенными на исполнительном органе 2 кулачками, воздействующими на ми кролереключатель, пневмоклапан и другие элементы. Сцепление и расцепление собачки 27 с исполнительным о-рганом 2i осуществляется при помощи упора 29.
Для поворота распределительного 1У служит рычаг 3U. Исполнительный орган 3, свободно сидящий .на валике 17, служит для получения команд (импульсов) большой длительности. Исполнительный О:рган J/ поворачивается на угол 18U при помощи собачки 32, сцепление и расцепление которой с исполнительным органом 31 осуществляется упорами 33 (начало команды) и 34 (.конец команды).
Для отработки длительности 1команды на главном валике 17 свободно посажено храповое колесо 35, которое поворачивается собачкой ЗЬ. Для сцепления собачки 3ti с Храповым колесом 35 на распределительном валике 37 установлен упо-р 38, для расцепления - упор 3i, установленный на распределительном валике 40. Упоры 38 и 3i настраиваются таким образом, что за один оборот главного валика Г/ храповое -колесо 35 поворачивается на один зуб, т. е. ведется отработка программы, установленной задающим механизмом длительности команды.
Задающий механизм длительности команды состоит из иополнптельного двигателя (например, шагового; 4J, валика 42, на котором же|ст.ко закреплены задающий упор 43, для расцепления собачки и, следовательно, остановки храпового колеса 35 в заданном положении и цилиндрическая шестерня 44. Для фиксации положения задающего упора 43 предусмотрено фиксирующее устройство 45. Для поворота распределительного валика 37 служит упор 46.
Распределительные валики 12, 19, 37 и 40 подпружинены возвратными пружинами. Для надежной фиксации в определенном положения храповое колесо и исполиительные органы имеют фрикционные прижимные устройства. Храповые колеса 4, 16, 35 и цилиндрические шестерни 9, 23, 44 имеют равное число зубьев.
Отработка устааовленной программы осуществляется следующим образом.
СОбачка 3 новорачивает храпово.е колесо 4 за каждый оборот двигателя на один зуб до момента встречи уступа на храповом колесе 4 с поворотным рычагом 13. При следующем захвате собачкой 5 храпового .колеса 4 уступ находит 1на поворотный рычаг 13 и поворачивает распределительный валик 12. При этом расцепляющий упор 6 выхо.дит лз радиуса вращения собачки 3, которая, не расцепляясь с храповым .колесом 4, вращает его до встречи
собачки 3 с задающим упором 8. Одновременно сцепляющий упор 14 входит в радиус вращения собачки 15, которая, набегая на упор 14, сцепляется с храповым «олесочм 16 и по.ворачивает его на один зуб. После соска.кивания уступа храпового колеса 4 с поворотного рычага 13 распределительный валик 12 под действием возвратной пружины приходит в исходное положение, и цикл отработки программы, установленной задающим механизмом
первой ступени, повторяется.
За каждый цикл храповое колесо 16 поворачивается на один зуб до встречи уступа храпового колеса 16 с поворотным рычагом 30. При следующем захвате собачкой 15 хра.пового колеса 16 его уступ находит на поворотный рычаг 30 и поворачивает распределительный валик 19 в результате поворота которого расцепляющий упор 18 выходит из радиуса вращения собачки 15. При этом собачка свободно
проходит упор 18, вращая храповое колесо 16 до встречи собачки с задающим упором 22, упор 29 входит в радиус вращения собачки 27, сцепляет ее с исполнительным органом коротких команд 28 и поворачивает его на угол
180°, т. е. подается .импульс малой длительности. Одновременио упор 33 входит в радиус вращения собачки 32, сцепляет ее с исполнительным органом 31 команд (импульсов) большой длительности и поворачивает его на
180°, что является началом подачи команды большой длительности.
При повороте на 180 исполнительный орган 31, имеющий профиль кулачка, набегает на рычаг и поворачивает распределительный валик 37 с упором 38. При этом упор 38 входит в радиус собачки 36, оцепляет ее с храповым колесом 35 и поворачивает его на величину одного зуба, т. е. происходит отработка программы, установленной задающим механизмом команды большой длительности до встречи уступа храпового колеса 35 с рычагом 47, установленным на распределительном валике 40. При следующем захвате собачкой храпового колеса 35 его уступ поворачивает распределительный валИК 40. При этом расцепляющий упор 39 выходит из радиуса .вращения собачки 36, которая, не расцепляясь с храповым колесом 35, свободно проходит над упором 39 и .поворачивает храповое .колесо до встречи
собачки 36 с задающим упором 43. Одновременно упор 34 входит в радиус вращения собачки 32, сцепляет ее с исполнительным органом 31 и поворачивает его на угол 180°, что является окончанием долговременной команды.
задания длительности цикла с шаговыми двигателями, отличающееся тем, что, с целью дистанционного форм ирования долговре;менных и Кратковременных команд, в «ем доиолнительно установлены шаговый дв игатель, соединенный с исиолнительным механизмом с закрепленным на нем профилированным кулачком, жестко соединенным с храповым колесом, через собачку связа1нным с валом синхронного двигателя, и исиолнительный механизм кратковременных команд с раздв11жными кулачками, диаметрально закрепленными на храновом Колесе, связанный через собачку с механ измом задания длительности цикла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод к плосковязальной пальчиковой машине | 1958 |
|
SU117804A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| СТВО ДЛЯ УПРАВЛЕНИЯ ПЛОСКОФАНГОВОЙМАШИНОЙ | 1966 |
|
SU178929A1 |
| ШАГОВЫЙ ПРИВОД | 1972 |
|
SU335752A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| Прибор для отпуска жидкости в измеренных количествах | 1933 |
|
SU36201A1 |
| Храповой механизм | 1986 |
|
SU1395884A1 |
| ЛЕНТОПРОТЯЖНЫЙ МЕХАННЗМ | 1972 |
|
SU333590A1 |
| СТАНОК ДЛЯ ПРАВКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ В ПРОЦЕССЕ ТЕРМООБРАБОТКИ | 1970 |
|
SU272793A1 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ДЛЯ ПЛАНЕТАРНОЙ КОРОБКИ ПЕРЕДАЧ | 2011 |
|
RU2527608C1 |
J 33 I I, /i .7 V.
//
;Р
/ 1 5 7
У
5И/51/5И
gs
