Известны механизмы гиреналол ения, содержащие комплект гирь, расположенных на горизонтальной подвеске весов, систему рычаi IB с толкателями и привод толкателей с поворотными элементами, равными количеству декад гирь.
Предложенный механизм гиреналожения отличается от известных тем, что в нем привод толкателей системы рычагов выполнен в виде многогранников, установленных на подвижной Б вертикальной плоскости каретке с возможностью поворота вокруг горизонтальной оси и имеющих на гранях отверстия для утапливания толкателей, и служит программным устройством, а привод каретки кинематически связан с механизмом разарретирования весов. Это позволяет повысить производительность работы весов.
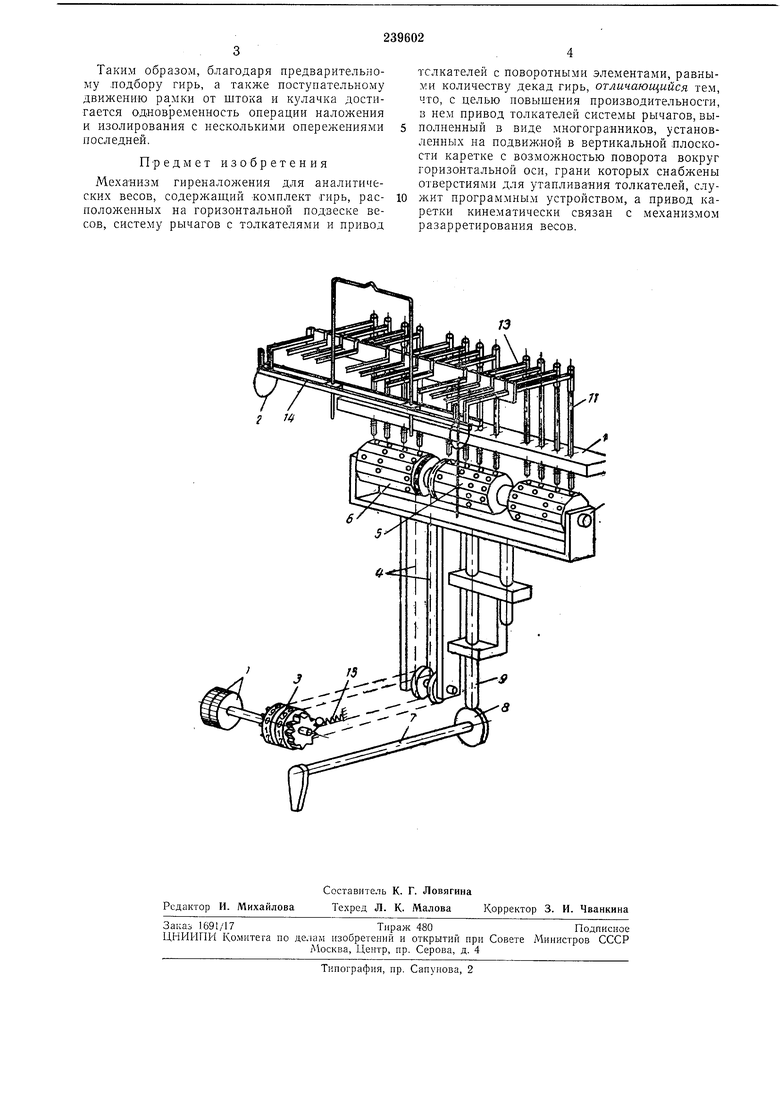
На чертеже представлена кинематическая схема механизма гиреналожения для аналитических весов.
Механизм гиреналожения содержит ручки 1 управления кольцевых гирь 2, постоянно завешанных на подвеску весов, оцифрованные по массе гирь лимбы 3, сваренные вместе с ручками управления и связанные цепочками 4 с соответствующими валиками 5 и б, число которых равно числу декад гирь. На гранях валиков в определенной последовательности наложения .или снятия гирь выполнены отверстия. Привод изолира 7 весов совмещен с кулачками 8, взаимодействующими со щтоком 9, на
котором укреплена рамка 10. Толкатели // перемещаются в направляющей 12 и несут рычаги 13 с гирями 2, постоянно навешенными на подвеску 14 весов. Для фиксации оцифрованных лимбов, а следовательно, и валиков в нужном положении предусмотрен фиксатор с пружиной 15. Механизм работает следующим образом.
С помощью ручек / предварительно набирают нужные для наложения или снятия гири 2. При повороте ручек одновременно вращаются оцифрованные по .массе гирь лимбы 3, связанные цепочками 4 с соответствующими валиками 5 и 5.
Когда гири предварительно подготовлены к снятию с подвески весов, поворачивают ручку изолира 7 весов. Вместе с ручкой изолира поворачивается и кулачок 8. Шток 9, поднимаясь в .направляющих, поднимает и рамку 10, а вместе с ней закрепленные в рамке валики. Часть толкателей 11, закрепленных в направляющей 12 и несущих рычаги 13 с гирями, совместившись с отверстиями в валиках, утопляется в них (нижние концы толкателей) и остается на месте. Толкатели же, которые своими нижними конца.ми упираются в грани валика, поднимаются вместе с рычагами вверх и, следовательно, снимают нужные гири с подвески 14 весов. Процесс наложения гирь на иодвеску весов происходит в обратном порядке.
Таким образОхМ, благодаря предварительному .подбору гирь, а также поступательному движению рамки от штока и кулачка достигается одновременность операции наложения и изолирования с несколькими онережениями последней.
Предмет изобретения
Механизм гиреналолсения для аналитических весов, содержащий комплект гирь, расположенных на горизонтальной подвеске весов, систему рычагов с толкателями и привод
толкателей с поворотными элементами, равными количеству декад гирь, отличающийся тем, что, с целью повышения производительности, в нем привод толкателей системы рычагов, выполненный в виде многогранников, установленных на подвижной в вертикальной плоскости каретке с возможностью поворота вокруг горизонтальной оси, грани которых снабжены отверстиями для утапливания толкателей, служит программным устройством, а привод каретки кинематически связан с механизмом разарретирования весов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
| Механизм гиреналожения большегрузных весов | 1979 |
|
SU859823A1 |
| ЕХНМЧЕСКАЯ ' * BuP^ftOTHKA | 1967 |
|
SU190603A1 |
| Механизм гиреналожениябОльшЕгРузНыХ BECOB | 1978 |
|
SU794394A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Весы с компенсацией тары | 1975 |
|
SU539226A1 |
| АНАЛИТИЧЕСКИЕ ВЕСЫ С АВТОМАТИЧЕСКИМ ПОДБОРОМГИРЬ | 1969 |
|
SU243875A1 |
| Весы с устройством предварительного взвешивания | 1973 |
|
SU469892A1 |
ГЭ
7f
