Известны агрегаты для механизации и автоматизации очистных работ, включающие шарнирные многозвенные резцовые каретки, забойный конвейер и механизированную крепь.
Предложенный агрегат отличается тем, что шарнирные многозвенные резцовые каретки снабжены наклонной опорой и базовыми опорными захватами, соосными с тяговой цепью, а забойный конвейер выполнен с расположенными под тем же углом направляющими и зачистным ножом-лемехом. Это позволяет уменьшить энергоемкость и повысить сортность угля. Кроме того, для установки резцовых кареток в любом месте замкнутой цени без ее разъединения, базовые опорные захваты выполнены разъемными.
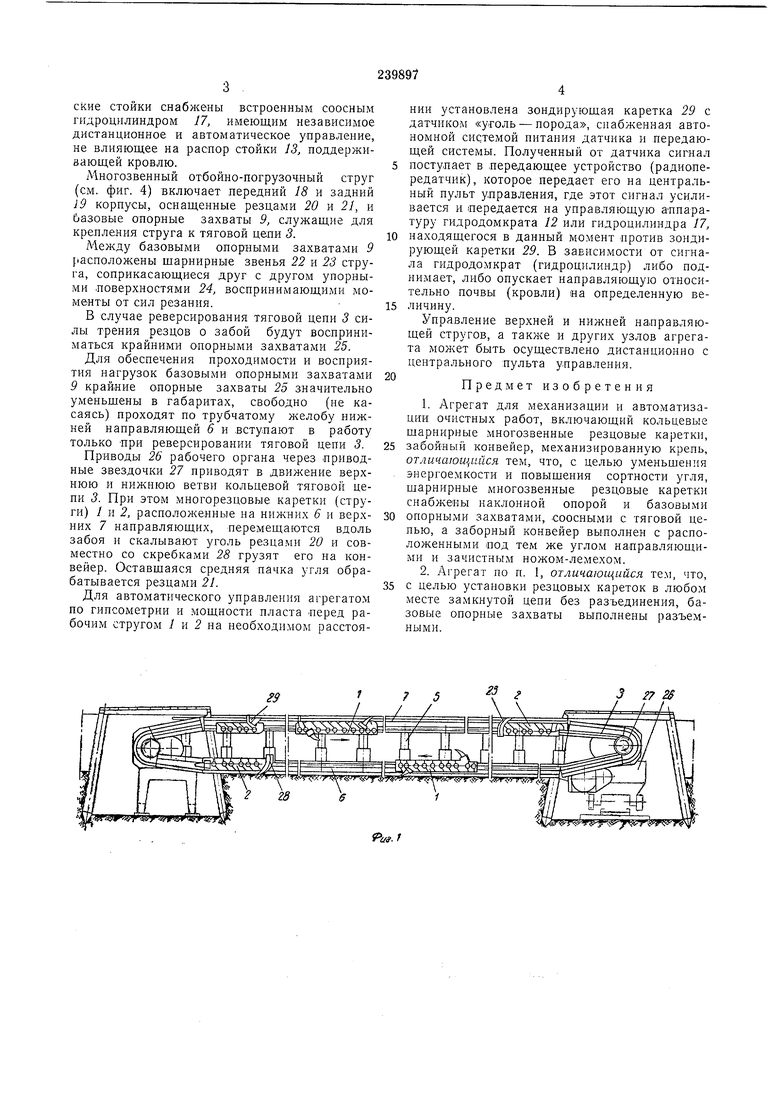
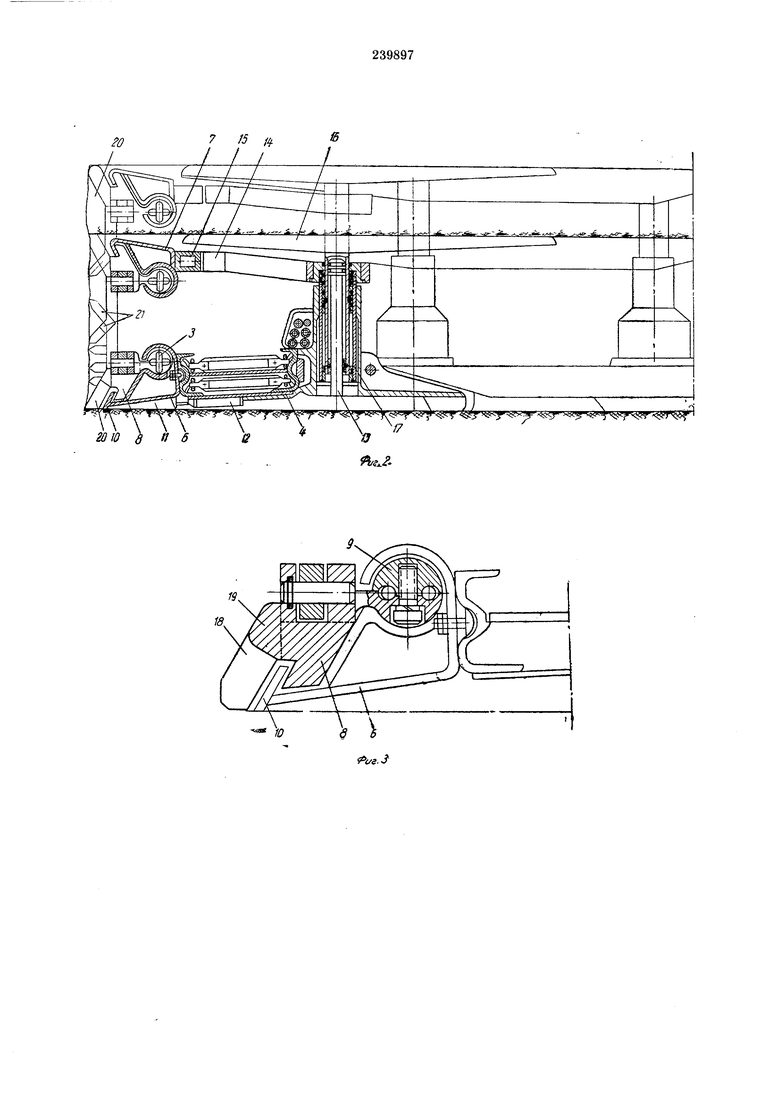
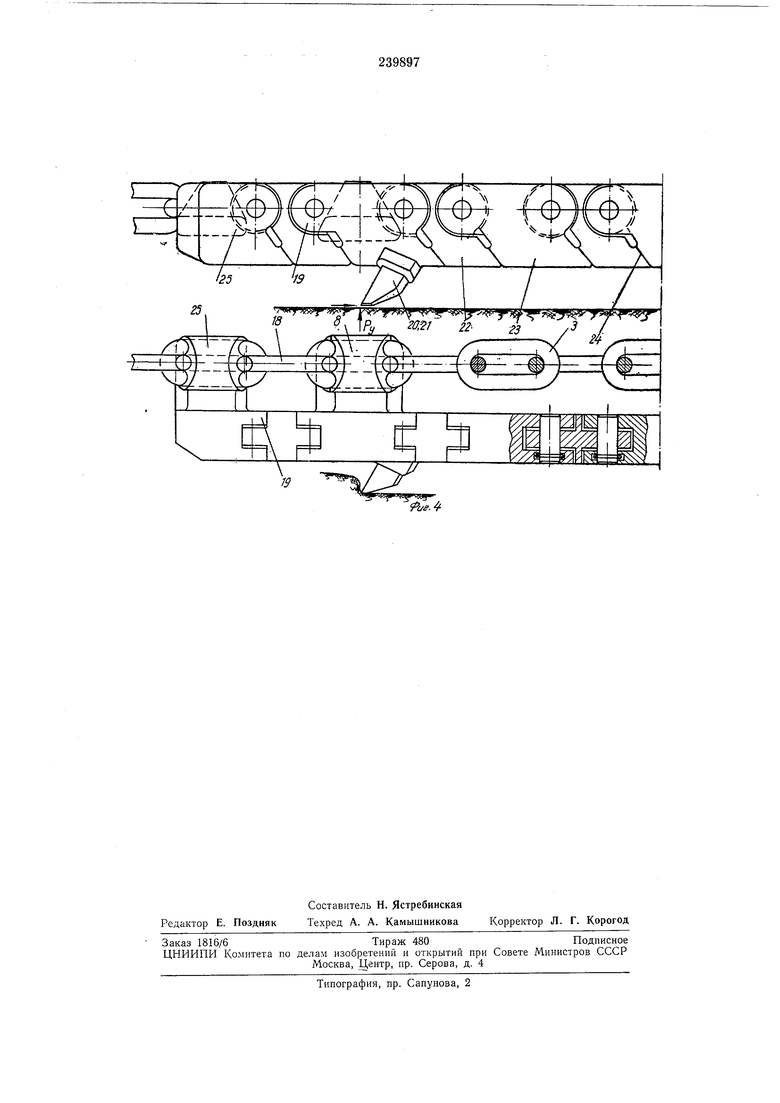
На фиг. 1 Представлен описываемый агрегат, общий вид; на фиг. 2 - линейная часть агрегата, поперечный разрез по лаве; на фиг. 3 показано направление струга у почвы; на фиг. 4 - отбойно-погрузочный струг с резцами, общий вид.
Очистной агрегат содержит кольцевые шарнирные многорезцовые каретки (струги) 1 и 2, закрепленные на цепи 3, забойный конвейер 4 и механизированную крепь 5. Многорезцовые каретки движутся яо нижней 6 и верхней 7 наклонным направляющим и снабжены опорой 8. Нижняя направляющая 6 прикреплена :К забойному борту секцни конвейера и имеет трубчатый л ;елоб, в котором размещена нижняя ветвь тяговой цепи 3 и базовые опорные захваты 9, с помощью которых каретки /
и 2 присоединены к тяговой цепи 3. Уголь с почвы при подаче конвейера на забой подбирается зачистным ножом-лемехом 10.
Под нижней направляющей 6 размещены донолнительные опоры 11, которые выдвигаются гидродомкратом 12 и слулсат для управления агрегатом по гипсометрии пласта. Верхняя наклонная направляющая 7 аналогично нижней имеет трубчатый для тяговой цепи и паз по всей длине для направления и
оноры стругов. Две гидравлические стойки 13 прикреплены с завальной стороны к каладой секции конвейера и снабл ;ены кронштейнами М и балкой 15, соединяющей их в единую раму.
Гидравлические стойки 13 служат для поддерлсания кровли в призабойной части рабочего пространства, для чего они снабжены перекрытиями 16.
Кроме того, они поддерживают и регулируют положение верхней направляющей 7, что обеспечивает раздвил ность и управление рабочим органом но мощности пласта и гипсометрии кровли. Для осуществления дополнительной функские стойки снабжены встроенным соосным гидроцилиндром 17, имеющим независимое дистанционное и автоматическое управление, не влияющее на расиор стойки 13, поддерживающей кровлю. Многозвенный отбойно-погрузочный струг (см. фиг. 4) включает передний 18 и задний 19 корпусы, оснащенные резцами W и 21, и базовые опорные захваты 9, служащие для кренления струга к тяговой цепи 3. Между базовыми опорными захватами 9 расположены шарнирные звенья 22 и 23 струга, соприкасающиеся друг с другом упорными .поверхностями 24, воспринимающими моменты от сил резания. В случае реверсирования тяговой цепи 3 силы трения резцов о забой будут восприниматься крайними олорными захватами 25. Для обеспечения проходимости и восприятия нагрузок базовыми опорными захватами 9 крайние олорные захваты 25 значительно уменьшены в габаритах, свободно (не касаясь) проходят по трубчатому желобу нижней направляющей 6 и .вступают в работу только -при реверсировании тяговой цепи 3. Приводы 26 рабочего органа через приводные звездочки 27 приводят в движение верхнюю и нижнюю ветви кольцевой тяговой цепи 3. При этом многорезцовые каретки (струги) / и 2, расположенные на нижних 6 и верхних 7 направляющих, перемещаются вдоль забоя и скалывают уголь резцами 20 и совместно со скребками 28 грузят его на конвейер. Оставшаяся средняя пачка угля обрабатывается резцами 21. Для автоматического управления агрегатом по гипсометрии и мощности пласта леред рабочим стругом / и 2 на необходимом расстояНИИ установлена зондирующая каретка 29 с датчиком «уголь - порода, снабженная автономной системой питания датчика и передающей системы. Полученный от датчика сигнал поступает в передающее устройство (радиопередатчик), которое передает его на центральный пульт управления, где этот сигнал усиливается и передается на управляющую аппаратуру гидродомкрата 12 или гидроцилиндра 17, находящегося в данный момент против зондирующей каретки 29. В зависимости от сигнала гидродомкрат (гидроцилиндр) либо поднимает, либо опускает направляющую относительно почвы (кровли) на определенную величину. Управление верхней и нижней направляющей стругов, а также и других узлов агрегата может быть осуществлено дистанционно с центрального пульта управления. Предмет изобретения 1.Агрегат для механизации и автоматизации очистных работ, включающий кольцевые шарнирные многозвенные резцовые каретки, забойный конвейер, механизированную крель, отличаюш ийся тем, что, с целью уменьшения энергоемкости и иовыщения сортности угля, шарнирные многозвенные резцовые каретки снабжены наклонной опорой и базовыми опорными захватами, соосными с тяговой цепью, а заборный конвейер выполнен с расположенными под тем же углом направляющими и зачистным ножом-лемехом. 2.Агрегат по п. 1, отличающийся тем, что, с целью установки резцовых кареток в любом месте замкнутой цепи без разъединения, базовые опорные захваты выполнены разъемными.
s
19 f г f S rv f jlJil W/ 1 f l /T r -f rj-y
