110
4
vj
vl
4i Изобретение относится к контрольно-измерительной аппаратуре и может быть использовано в электромашинах малых мощностей для балансировки роторов. Цель изобретения - автоматизация процесса балансировки роторов из мах- нитожестких сплавов путем обеспечени автоматической проверки и определения величины дисбаланса злектроэрозионным способом. На чертеже изображена блок-схема устройства для балансировки роторов Устройство для балансировки роторов содержит два основных узла, заключенных в общий корпус (на чертеже не показан), Первый узел предназначен дл5 определения величины и места дисбаланса, обработки данных и выдачи командных сигналов на вторе й узел, осуществляющий процесс корректировки. Первый узел включает в себя бесконтактный привод 1 с установленным на станине статором для вращения ротора, подвижными опорами, установленными с помощью плоских пружин на статоре, и схемой программного управления, размещенной на шасси (на чертеже не показаны), блок 2 програм много запуска, расположенный в корпу се, соединенный с приводом 1 посредством жгута и штепсельного разъема (на чертеже не показаны) и осуществляющий подачу питания в статор бесконтактного привода 1 по заданной программе, датчик 3 дисбаланса, закрепленньм на станине и соединенньш подвижными опорами посредством жесткой тяги (на чертеже не показана), электроизмерительную схему 4, состоя щую из избирательного усилителя, катодного повторителя, формирователя импульсов, усилителя импульсов, усилителя мощности, тиратронного генератора и импульснбй лампы (на чертеже не показаны), поблочно расположенных на шасси, установленном в корпусе и соединенным системой жгутов, релейньш коммутатор 5, осуществлякнций автоматическое коммутировани датчика 3 дисбаланса, два блока 6 и 7 памяти, например, емкостно-триодно го типа, расположенные на отдельном шасси в корпусе (на чертеже не показаны) и осуществляющие хранение информации по дисбалансу после его пер вич:юй обработки в электроизмерител 742 ной схеме 4, задатчик 8 времени обработки, связанный с блоками 6 и 7 памяти и предназначенный для преобразования сигнала величины дисбаланса, обработанного в электроизмерительной схеме 4 во время обработки (снятие дисбаланса), выдающий командные сигналы на начало и конец обработки. Блок 9 питания, расположенный в корпусе, осуществляет питание всей схемы за исключением привода 1. Второй узел устройства для корректировки дисбаланса роторов включает в себя машинно-вентильньй генератор 10, осуществляющий питание рабочим током, и осуществляющий автоматическое регулирования режимов обработки блок 11 управления электроэрозионного устройства, включающего рабочий электрод 12, управляющий блокрм 13 следящей системы, состоящей из механизма перемещения электрода и электронную следящую систему (на чертеже не показаны). Во время обработки ротор 14 закрепляется в специальном узле 15 крепления, установленном на неподвижной станине. Во время обработки узел 15 крепления, ротор 14 и электрод 12 находятся в рабочей ванне 16, подъемом которой управляет блок 17 подъема и опускания ванны 16 через редуктор 18. Устройство для балансировки роторов работает следующим образом. Ротор 14 устанавливается в подвижные опоры бесконтактного привода 1 и по заданной программе приводится во вращение полем статора. По истечении переходных процессов в приводе 1 датчик 3 дисбаланса вьздает сигнал в электроизмерительную схему 4. Здесь сигнал усиливается избирательным усилителем и поступает на катодный повторитель, где разветвляется, первая ветвь поступает на формирователь импульсов, затем на усилитель импульсов и далее на тиратронньй генератор, питающий импульсную лампу. Вторая ветвь от катодного повторителя идет на усилитель мощности, затем на релейньш коммутатор 5, который осуществляет автоматическое коммутирование усиленного сигнала на два канала блоков 6 и 7 памяти, хранящих информацию о дисбалансе. При проверке первого ротора информация поступает на блок 6 памяти, по окончании определения места и величины дисбаланса ротор 14 снимается с привода 1 и устанавливается в узел 15 крепления для снятия дисбаланса, после чего в привод 1 устанавливается второй проверяемый ротор, процесс повторяется, а информация поступает на блок 7 памяти. В то же время информация из блока 6 памяти поступает в задатчик 8 времени обработки, который управляет с помощью блока 11 управления электроэрозионного устройства электроэрозионным процессом снятия дисбаланса. Заданньй режим обработки ротора 14 поддерживается автоматически блоком 13 следящей системы, который управляется рабочим электродом 12. По истечении времени обработки рабочий ток отключается, электрод 12 отходит в исходное положение, узел 15 крепления выходит из ванны 16, и ротор 14 вынимается. Процесс балансировки первого ротора закончен, информация в блоке 6 памяти автоматически стирается. К этому времени уже подготовлена информация по величине и месту дисбаланса второго ротора в блоке 7 памяти, которы проверялся в то же время, пока велась обработка первого ротора. Второй ротор устанавливается для обработки и процесс ведется аналогично, что и в первом случае, но информация поступает уже с блока 7 памяти, а первый узел устройства для балансировки роторов начинает проводить проверку третьего ротора с подачей информации опять в блок 6 памяти и т.д.
Процесс снятия дисбаланса производится в среде масла в рабочей ванне 16, которая автоматически поднимается и опускается с помощью блока 17 через редуктор 18.
Данное устройство для балансировки роторов представляет собой совокупньй-комплекс блоков и устройств, .соединенных между собой в технологической последовательности, обеспечивающей автоматическую проверку и определение величины дисбаланса, также собственно балансировку роторов из магнитно-жестких сплавов (например, АНКО-4) электроэрозионным методом по данным, полученным измерительной части и заложенным в блоки памяти.

| название | год | авторы | номер документа |
|---|---|---|---|
| Балансирующее устройство | 1988 |
|
SU1613898A1 |
| ЭЛЕКТРОЭРОЗИОННЫЙ АВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ПРОШИВАНИЯ ОТВЕРСТИЙ В ТЕЛАХ ВРАЩЕНИЯ | 1991 |
|
RU2032505C1 |
| ИЗМЕРИТЕЛЬ ДИСБАЛАНСА | 1992 |
|
RU2030724C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ШПИНДЕЛЬНЫХ УЗЛОВ | 2011 |
|
RU2467836C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
| Устройство для динамической балансировки роторов | 1985 |
|
SU1293508A1 |
УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ, содержащее бесконтактный привод со статором для вращения ротора, датчик дисбаланса, электроизмерительную схему, электроэрозионное устройство для снятия дисбаланса блок памяти, получающий информацию от электроизмерительной схемы, и задатчик времени обработки, связан- ньш с блоком памяти, отличающееся тем, что, с целью автоматизации процесса балансировки роторов из магнитожестких сплавов, оно снабжено блоком программного запуска, осуществляющим подачу питания в статор бесконтактного привода по заданной программе, и блоком управления электроэрозионного устройства, осуществляющим автоматическое регулирование режимов обра- . ботки.S.(Л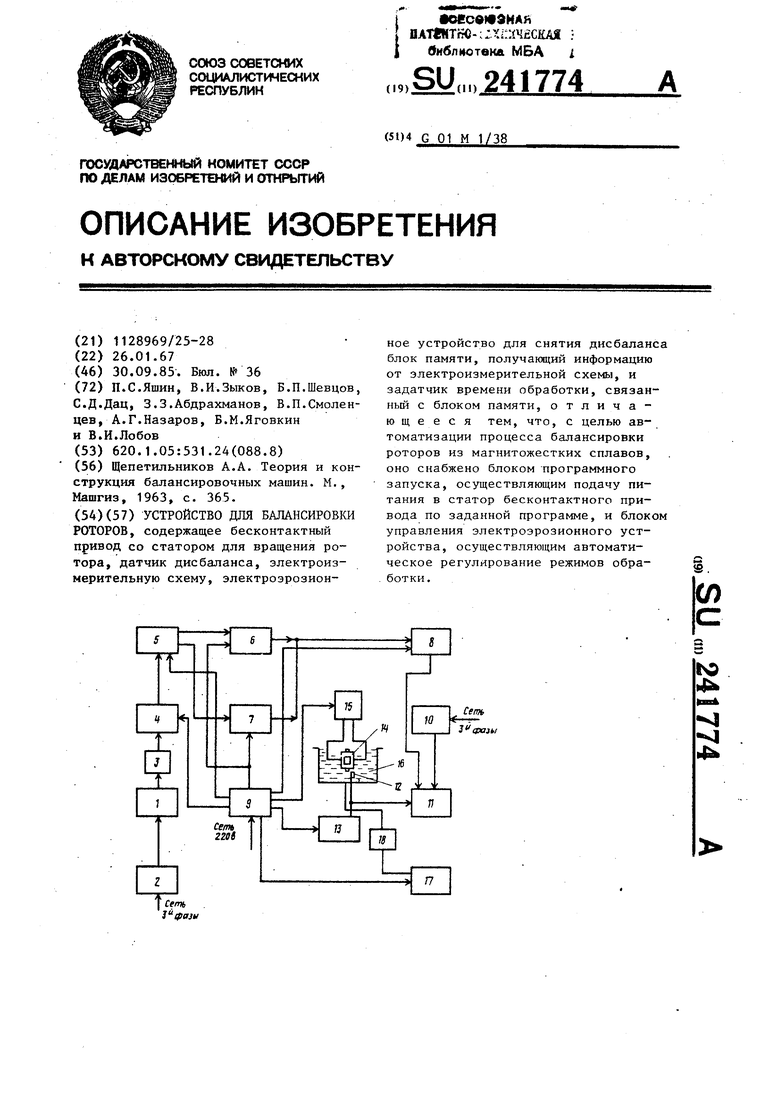
| Щепетильников А.А | |||
| Теория и конструкция балансировочных машин | |||
| М,, Машгиз, 1963, с | |||
| Станок для нарезания зубьев на гребнях | 1921 |
|
SU365A1 |
