Известны устройства для, измерения И1скри1вления скважин, состоящие из узла регистрации сигналов, преобразователя и матнито-модулядиоЕных датчиков,.
Предлагаемое устройство отличается от известных тем, что устройство дополнительно снабжено двух координатным индукционным датчиком, лричем статор индукционного датчика жестко закреплен относи,тельно магнитОмодулящионных датчиков так, что одноименные оси чувствительности обоих датчиков взаимно параллельны.
Та,кое выполнение устройства позволяет повысить точность измерений азимутальных углов.
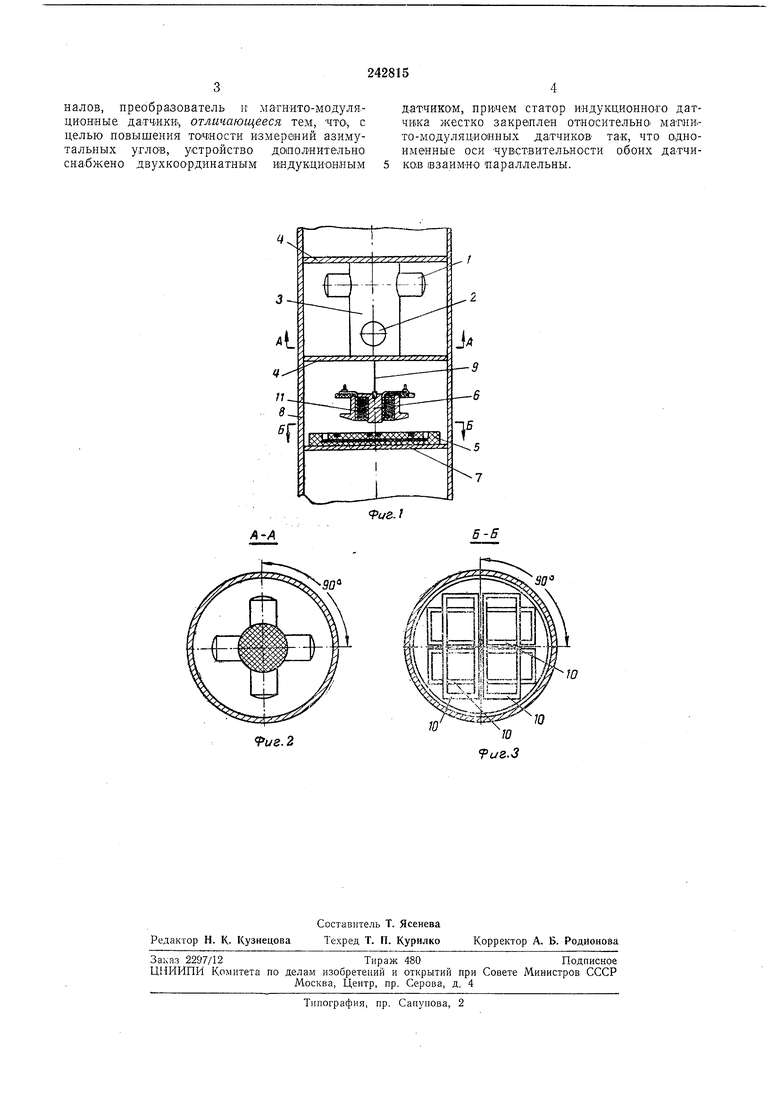
Па фиг. 1 представлена конструктивная схема устройства; на фиг. 2-сечение по А-А на ,ф.ит. I; на фиг. 3-сечение ло Б-Б на фиг. 1.
Устройство выполнено в форме скважиннО)ГО снаряда, имеющего Цилиндрический немагнитный кожух, герметически закрытый сверху и ониву на.конечникамИ|.
Чувствительными элементами являются два матнито-модулящионных датчика 1, 2. Датчики расположены в установочной колодке 3, жестко связанной с перегородками 4. Двухкомпонентный индукционный датчик угла имеет неподвижную часть - статор 6 я подвижную часть - ротор 6. Статор установлен на горизонтальной площадке 7, которая жестко закреплена в Koipnyce 8 скважинного снаряда. iPoTop датчика угла подвешен на нити 9 так, что она совпадает с вертикальной осью устройства. Корпус статора 5 имеет пазы для
укладки обмоток 10 прямоугольной формы. Укладываются онй в па|3ы корпуса статора так, что оси чувствительности двух пар обмоток образуют прямоугольную систему координат. В корпусе ротора 6 уложена круговая
обмотка возбуждения 11.
В процессе измерения, когда скважинный снар1яд меняет свое положение в пространстве, в измерительных обмотках ма-гнитогмодуляционных датчиков 1 v. 2 так же, как и в
измерительных обмотках индукционного датчика угла, появляются электрические сигналы, характеризующие ориентацию скважин«ого снаряда в момент измерения. При отклонении прибора от вертикали в любую сторону
ротор датчика угла под воздействием грав-итационного поля Земли сохраняет свою .вертикальную установку, но смещается OITHOCHтельно: статора 5. Одна1ко при всех изменениях положения скважинного снаряда оси чувствительности магнито-модуляцнонных датчиков 12 и датчика угла сохраняют неизменное полол ение относительно друг друга,. налов, преобразователь и матнито-модуляционные датчики, отличающееся тем, чтО, с целью повышения точиости измерений азимутальных углов, устройство доооляительно снабжено двухкоординатным иядукци-оаным 5 датчиком, при1чем статор индукционного датчвка жестко закреплен относительно матни-то-модуляц«онных да;тчиков так, что одноименные оси чув1ствительно€ти 0:боих датчиKOIB взаимно параллельны.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КОМПЛЕКСА ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ И НАПРАВЛЕНИЯ ОТКЛОНИТЕЛЯ | 1970 |
|
SU285860A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ИНКЛИНОМЕТР | 1971 |
|
SU310035A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1972 |
|
SU323681A1 |
| ДАТЧИК УСИЛИЯ | 1972 |
|
SU343901A1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| Инклинометр | 1978 |
|
SU794208A1 |
50
иг.2
SO
