Изобретение относится к нротезостроенню, а именно к системам унравлення биоэлектрическими протезами рук.
Известна система управления биоэлектрическим протезом по авт. св. № 243142, содержащая датчики силы схвата и пространственного положения пальцев, преобразователи и электромеханические вибраторы. Она сложна и недостаточно удобна в эксплуатации.
Предлагаемая система управления биоэлектрическим протезом отличается от известной тем, что в протезе установлен модулятор, выполненный в виде электронного ключа и управляемого мультивибратора. Модулятор включен между преобразователем величины силы схвата п преобразователем положения пальцев. Такое построение системы управления упрощает пользование протезом.
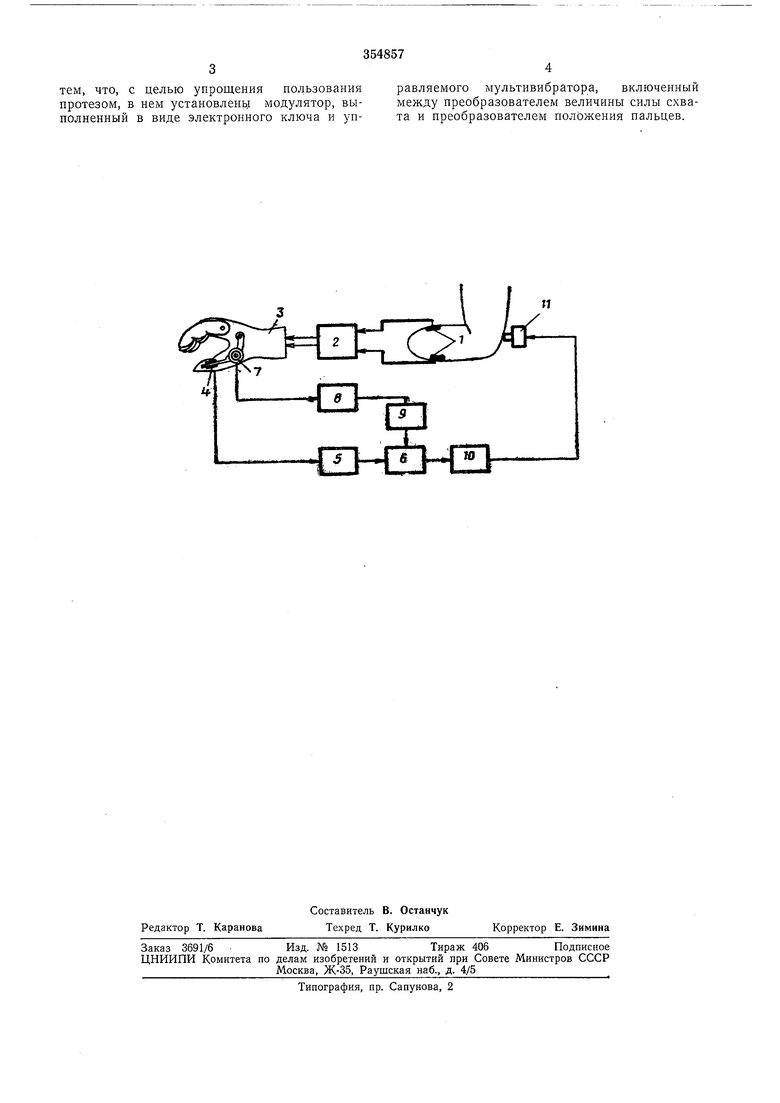
Па чертеже изображена блок-схема предлагаемой системы управления.
Система содержит токосъемные электроды 1, прямой канал управления 2, искусственную кисть 3, датчики 4 силы схвата, тензометрический усилитель 5, импульсный преобразователь 6 сигнала величины силы схвата, датчик 7 пространственного положения пальцев, импульсный преобразователь 8 сигнала величины перемещения, электронный ключ 9,
усилитель мощности 10 и датчик-стимулятор 1.
При движении пальцев искусственной кисти датчик пространственного положения
пальцев изменяет частоту следования импульсов преобразователя 8, выходной сигнал которого через электронный ключ управляет работой преобразователя 6.
В случае отсутствия сигнала о величине
силы схвата преобразователь 6 генерирует импульсы с минимально установленной частотой, и с выхода модулятора, образованного электронным ключом 9 и преобразователем 6, снимаются пачки импульсов определенной
длительности, частота следования которых (частота модуляции) пропорциональна величине сигнала датчика 7 пространственного положения пальцев при постоянной частоте заполнения (несущая частота).
В случае нагружения датчика 4 силы схвата сигнал о величине силы схвата через тензометрический усилитель 5 подается на вход преобразователя 6, частота генерации которого является частотой заполнения пачек-нмпульсов модулированного сигнала.
тем, что, с целью упрощения пользования протезом, в нем установлень модулятор, выполненный в внде электронного ключа и управляемого мультивибратора, включенный между преобразователем величины силы схвата и преобразователем положения пальцев.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕИИЯ БИОЭЛЕКТРИЧЕСКИМИ ПРОТЕЗАМИ ВЕРХНИХ КОНЕЧИОСТЕЙ | 1970 |
|
SU278023A1 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ БИОЭЛЕКТРИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ | 1967 |
|
SU196249A1 |
| Устройство для управления электроприводом биоэлектрического протеза | 1969 |
|
SU280766A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Устройство для управления биоэлектрическими протезами верхних конечностей | 1980 |
|
SU936908A1 |
| СИСТЕМА УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМ ПРОТЕЗОМ | 2016 |
|
RU2653820C2 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |