Известен способ частотного регулирования скорости асинхронного двигателя, питающегося от статического преобразователя частоты, путем воздействия на управляющие напряжением и частотой цепи преобразователя с использованием сигнала, пропорционального абсолютному скольжению, и сигнала, пронорционального току статора двигателя.
Предлагаемый способ отличается от известного тем, что сигнал, пропорциональный абсолютному скольжению, преобразуют в сигнал, пропорциональный модулю значения абсолютного скольжения, сравнивают с сигналом, пропорциональным току статора, а полученный от сравнения сигнал подают в управляющую напряжением цепь преобразователя частоты.
Это упрощает способ, обеспечивает надежность и повышает качества переходных процессов.
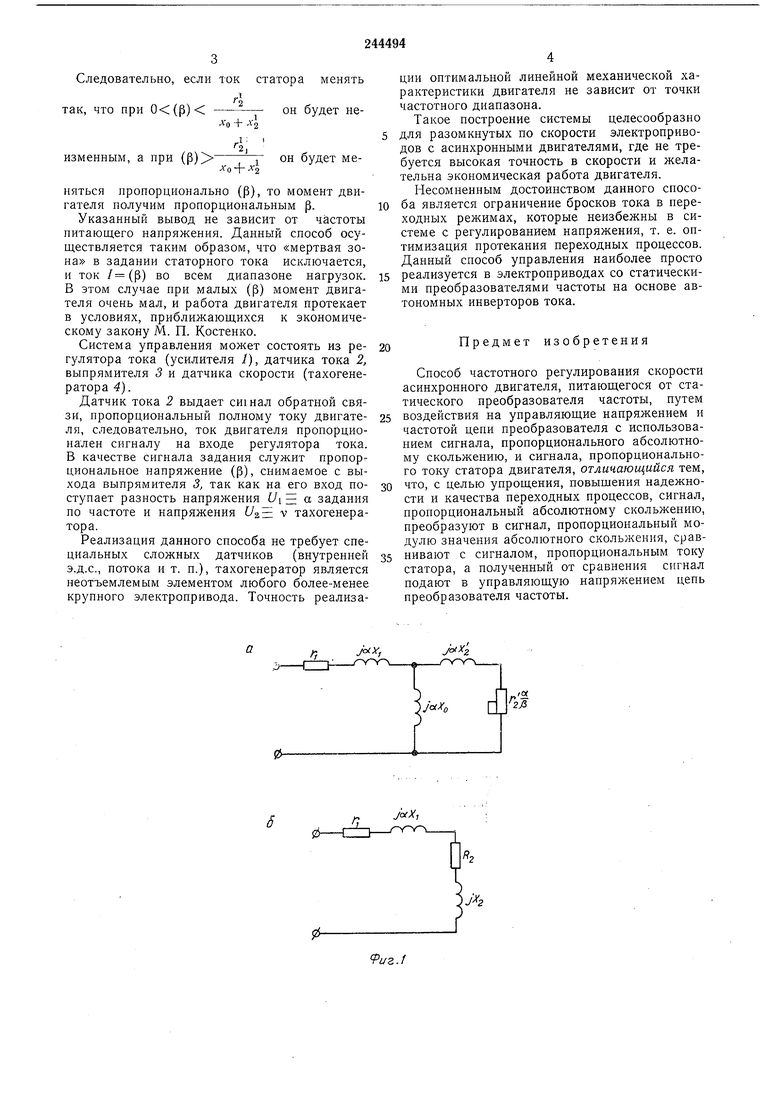
На фиг. la,б даны схемы замещения асинхронного двигателя, где riXi - параметры статорной цепи; rig, -параметры роторной цепи; Хо - сопротивление намагничивающей
ветви; р - абсолютное скольжение; - -
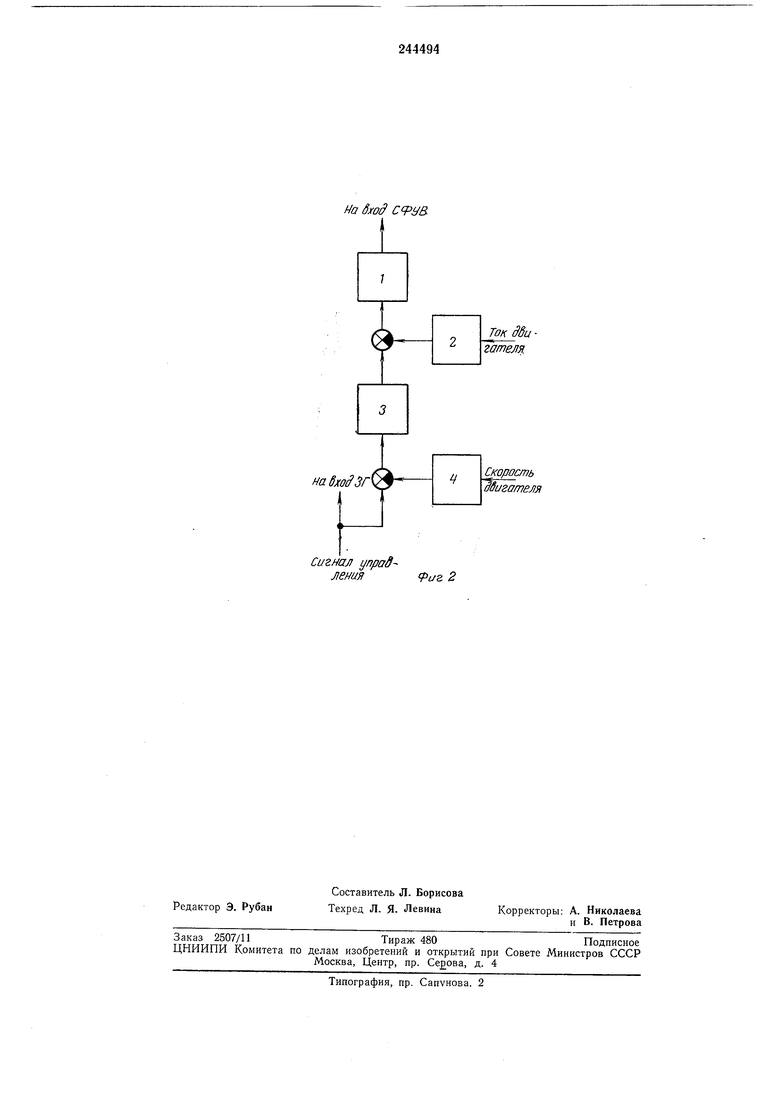
Па фиг. 2 дана блок-схема системы управления приводом. Момент двигателя равен
М 3-5, где / - ток статора; Rz-суммарное активное сопротивление роторной цепи и намагничивающего контура (см. фиг. 1,6).
: а
г
г 2 Н ( + )
+ (Хй + ла)
где р - абсолютное скольжение двигателя. Приблилсенно можно представить RZ равным:
-о Р ( Н- х.) , Q 0
R
г ,1
.TO +
20
при 0(3)X(i + А2
г
R
I
+ х j (0 + )
Хй Н- 2
Следовательно, если ток статора менять
4 так, что при 0(р)он будет нел- I - AQ + Л2
1 : t
изменным, а при (р) он будет меХо + 4
няться нропорционально (р), то момент двигателя получим пропорциональным р.
Указанный вывод не зависит от частоты питающего напряжения. Данный способ осуществляется таким образом, что «мертвая зона в задании статорного тока исключается, и ток /(Р) во всем диапазоне нагрузок. В этом случае при малых (р) момент двигателя очень мал, и работа двигателя протекает в условиях, приближающихся к экономическому закону М. П. Костенко.
Система управления может состоять из регулятора тока (усилителя /), датчика тока 2, выпрямителя 3 и датчика скорости (тахогенератора 4).
Датчик тока 2 выдает си1нал обратной связи, пропорциональный полному току двигателя, следовательно, ток двигателя пропорционален сигналу на входе регулятора тока. В качестве сигнала задания служит пропорциональное напряжение (р), снимаемое с выхода выпрямителя 3, так как на его вход поступает разность напряжения t/i а задания по частоте и напряжения /аЕ v тахогенератора.
Реализация данного способа не требует специальных сложных датчиков (внутренней Э.Д.С., потока и т. и.), тахогенератор является неотъемлемым элементом любого более-менее крупного электропривода. Точность реализации оптимальной линейной механической характеристики двигателя не зависит от точки частотного диапазона. Такое построение системы целесообразно
для разомкнутых по скорости электроприводов с асинхронными двигателями, где не требуется высокая точность в скорости и желательна экономическая работа двигателя. Несомненным достоинством данного способа является ограничение бросков тока в переходных режимах, которые неизбежны в системе с регулированием напряжения, т. е. оптимизация протекания переходных процессов. Данный способ управления наиболее просто
реализуется в электроприводах со статическими преобразователями частоты на основе автономных инверторов тока.
Предмет изобретения
Способ частотного регулирования скорости асинхронного двигателя, питающегося от статического преобразователя частоты, путем
воздействия на управляющие напряжением и частотой цепи преобразователя с использованием сигнала, пропорционального абсолютному скольжению, и сигнала, пропорционального току статора двигателя, отличающийся тем,
что, с целью упрощения, повышения надежности и качества переходных процессов, сигнал, пропорциональный абсолютному скольжению, преобразуют в сигнал, пропорциональный модулю значения абсолютного скольжения, сравнивают с сигналом, пропорциональным току статора, а полученный от сравнения сигнал подают в управляющую напряжением цепь преобразователя частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2015 |
|
RU2599529C1 |
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1972 |
|
SU442561A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Способ эксплуатации в синхронном режиме частотно-регулируемых асинхронных двигателей с фазным ротором | 2018 |
|
RU2694892C1 |
0ycv/o
Сигнал ijnpadления риг 2
На дхо СсруВ
Ток д8и гатемя.
Скорость wJгameля
