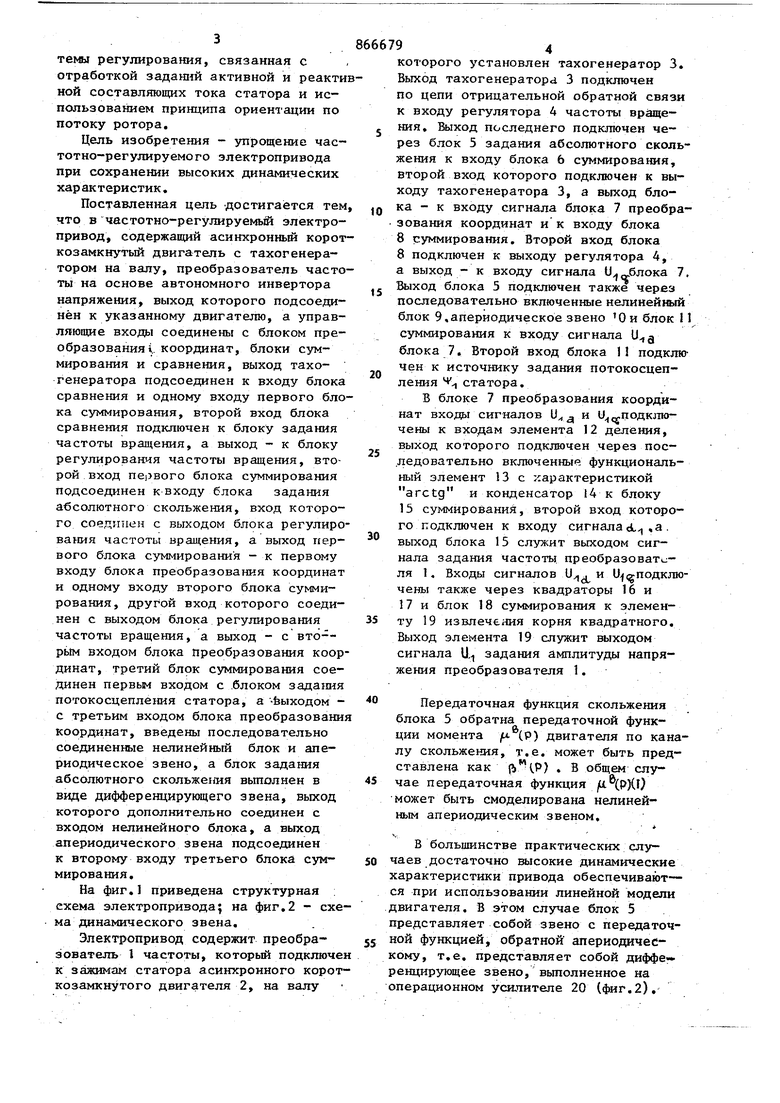
Изобретение относится к электротехнике, может быть использовано в управляемых электроприводах с ти- ристорными преобразователями частот на основе автономных инверторов напряжения и асинхронными короткозамкнутыми двигателями и предназна чено для регулирования скорости наг рузки. Известен частотно-регулируемый электропривод, содержащий асиихоонный двигатель, тахогенератор, преоб разователь частоты с автономным инвертором напряжения, регулятор частоты вращения, В функции выходного сигнала регу лятора частоты вращения формируется сигнал частоты скольжения, который сум№ руется с сигналом тахогенерато Результат используется дпя .формирования задания частоты и амплитуды выходного напряжения преобразовате-ля частоты Го. Однако указанный привод не обеспечивает постоянства потокосцепления двигателя, что приводит к неодно ;начности его регулировочных характеристик на разных частотах, а также имеет низкие динамические показатели, поскольку не учитываются динамические особенности асинхронного двигателя. Наиболее близким техническим решением к предлагаемому изобретению является частотно-регулируемый злектропривод, который содержит асинхронный двигатель с тахогенератором на валу, преобразователь частоты на основе автономного инвертора с замкнутой системой регулирования тока, к которому подсоединен двигатель, рв гуляторы частоты вращения, ток%, мо мента и потокосцепления, блоки преобразования координат и ориентации, датчики тока статора и блоки суммирования Г23 Недостатком известного электропривода является большая сложность сие- регулирования, связанная с отработкой задашш активной и реакти ной составляющих тока статора и использованием принципа ориентации по потоку ротора. Цель изобретения - упрощение частотно-регулируемого электропривода при сохранении высоких динамических хар актеристик. Поставленная цель Достигается тем что в частотно-регулируемьй электропривод, содержащий асинхронный корот козамкнутый двигатель с тахогенератором на валу, преобразователь часто ты на основе автономного инвертора напряжения, выход которого подсоединён к указанному двигателю, а управляющие входы соединены с блоком преобразования i. координат, блоки суммирования и сравнения, выход тахогенератора подсоединен к входу блока сравнения и одному входу первого бло ка суммирования, второй вход блока сравнения подключен к блоку задания частоты вращения, а выход - к блоку регулирования частоты вращения, второй вход первого блока суммирования Подсоединен к входу блока задания абсолютного скольжения, вход которого соединен с выходом блока регулиро вания частоты вращения, а выход первого блока суммирования - к первому входу блока преобразования координат и одному входу второго блока суммирования, другой вход которого соединен с выходом блока регулирования частоты вращения, а выход - с вто-рь1м входом блока преобразования коор динат, третий блок суммирования соединен первым входом с .блоком задагшя потокосцепления статора, а -быходом с третьим входом блока преобразовани координат, введены последовательно соединенные нелинейный блок и апериодическое звено, а блок задания абсолютного скольжегшя вьтолнен в виде дифференцирующего звена, выход которого дополнительно соединен с входом нелинейного блока, а выход апериодического звена подсоединен к второму входу третьего блока суммирования. На фиг, приведена структурная ; схема электропривода; на фиг,2 - схе ма динамического звена. Электропривод содержит преобразователь 1 частоты, который подключе к зажимам статора асинхронного корот козамкнутого двигателя 2, на валу 94 которого установлен тахогенератор 3, Выход тахогенератора 3 подключен по цепи отрицательной обратной связи к входу регулятора 4 частоты вращения. Выход последнего подключен через блок 5 задания абсолютного скольжения к входу блока 6 суммирования, второй вход которого подключен к выходу тахогенератора 3, а выход блока - к входу сигнала блока 7 преобразования координат и к входу блока 8 суммирования. Второй вход блока 8 подключен к выходу регулятора 4, а выход - к входу сигнала .блока 7. блока 5 подключен также через последовательно включенные нелинейный блок 9,апериодическое звено О и блок 11 суммирования к входу сигнала U,g блока 7. Второй вход блока 11 подключен к источнику задания потокосцепления -, статора, В блоке 7 преобразования координат входы сигналов U и U подключены к входам элемента 12 деления, выход которого подключен через последовательно включенные функциональный элемент 13 с характеристикой arctg и конденсатор 14 к блоку 15 суммирования, второй вход которого подключен к входу сигнала d, ,а . выход блока 15 служит выходом сигнала задания частоты; преобразоват - ля 1, Входы сигналов и и.(,подключены также через квадраторы 16 и 17 и блок 18 суммирования к элементу 19 извлече;тя корня квадратного. Выход элемента 19 служит выходом сигнала Щ задания амплитуды напряжения преобразователя 1, Передаточная функция скольжения блока 5 обратна передаточной функции момента /t (Р) двигателя по каналу скольжения, т,е, может быть представлена как ) . В общем случае передаточная функция /а(р)(1} может быть смоделирована нелинейным апериодическим звеном, в больщинстве практических случаев достаточно высокие динамические арактеристики привода обеспечиваются при использовании линейной модели вигателя, В этом случае блок 5 редставляет собой звено с передаточной функцией, обратной апериодичесому, т,е, представляет собой диффеенцирующее звено, вьшолненное на перационном усилителе 20 (фиг,2), Нелинейный блок 9 имеет характеристикуОн может быть выполнен по привдипу кусочно-линейной аппроксимации криволинейных зависимостей. Апериодические звено 10 имеет характеристику частотно-зависимого сомножителя и реализуется операцион ным усилителем, шунтированным по це пи обратной связи параллельно включенными конденсатором и резистором. Электропривод работает следующим образом, В установившемся режиме сигнал oL на выходе сумматора 6 определяет частоту преобразователя 1 () ,а поскольку на входы сумматора 6 пост пают сигнал V с выхода тахогенерато ра и выходной сигнал блока 5, то последний является абсолютным сколь жением fi . Блок 5 реализует зависи мость скольжения от момента двигате ля, следовательно, на выходе регулятора частоты вращения имеем сигнал момента /х . Этот сигнал используется как сигнал проекции тока ,фиг.З) для формирования на выходе блока 8 суммирования сигнала . Сигнал скольжения (Ь , преобразованньш нелинейным блоком 9 и апериодическим звеном 10, складывается в блоке 11 суммирования с сигналом, пропорциональным заданию потокосцеп ления vv статора двигателя. На выхо де блока суммирования формируется . сигнал Щ. На выходе блока 7 преоб разования координат получаем сигналы задания амплитуды U и частоты напряжения преобразователя частоты в соответствии с заданным потокосце лением V. В переходном процессе, например при посадке частоты вращения Л) , регулятор 4 увеличивает задание момента. Звено 5 увеличивает скольжение (Ь , увеличивается oL , соответственно увеличиваются сигналы пр екций и и. На выходе блока 7 получаем увеличенные dL и Ц, . При этом за счет изменения соотношения междуи а каналу элементов 12-14 блока 7 в функции производной этого соотношения формируется коор- рёктирующее воздействие в частоту. 96 которое обеспечивает поддержиьание -1 const в переходном процессе. Блок 5 обеспечивает форсировку скольжения при изменений задания момента. Благодаря этому достигается безынерционная отработка момента, т.е. выходной сигнал регулятора 4 частоты вращения пропорционален фактическому моменту двигателя. Изобретение позволяет получить высокие динамические показатели за счет поддержания режима постоянного потокосцепления двигателя и компенсации его инерционности при отработке момента в функции скольжения в этом режиме При этом достигается существенное упрощение электропривода в сравнении с известтатм. Формула изобретения Частотно-регулируемый электропривод, содержащий асинхрон 1ый короткозамк1{утый двигатель с тахогенератором на валу, преобразователь частоты на основе автономного инвертора напря жения, выход которого подсоединен к указанному двигателю, а управляющие входы соединены с блоком преобразования координат, блоки суммирования и сравнения, выход тахогенератора подсоединен к входу блока сравнения и к входу первого блока суммирова1шя, второй вход блока сравнения подключен к блоку задания час тоты вращения, а выход - к блоку регулирования частоты, другой вход первого блока суммирования подсоединен к входу блока задания абсотпотного скольжения, вход которого соединен с выходом блока регулирования частоты вращения, а выход первого блока суммирования - к первому входу блока преобразования координат и к одному входу второгоблока сумми рования, другой вход которого соединен с выходом блока регулирования частоты вращения, а выход - с вторым входом блока преобразования координат, третий блок суммирования соединен первым входом с блоком задания потокосцепления статора, а вых,9домс третьим входом блока преобразования координат, отличающи йс я тем, что, с целью упрощения, в него в.ведены последовательно соедиг ненные нелинейный блок и апериодическое звено, а блок задания абсо866679
лютного скольжения выполнен в виде дифференцирующего звена, ,выход которого дополнительно соединен с входом нелинейного блока, а выход апериодического эвена подсоединен к второму 5 входу третьего блока суммирования.
8
Источники информации, принятые во внимание при экспертизе
1о Электротехника, 1977, 7, C.32-J5.
2, Авторское свидетельство СССР № 656175, кл. Н 02 Р 7/42, 1976.


| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| Электропривод | 1978 |
|
SU782114A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
