Известен манипулятор для перемещения деталей, содержащий захват, кривошип и приводной механизм.
Цель изобретения - повышение надежности работы манипулятора.
Достигается это тем, что захват жестко соединен с шестерней, находящейся в зацеплении с зубчатым сектором, снабженным радиальным пазом, в котором размещен шарнир, соединяющий трехплечий рычаг с шатуном кривошипа, а рычаги захвата снабжены расположенным в направляющих ползуном со скосами и углублениями, в которые заходят РОЛИКИ рычагов захвата.
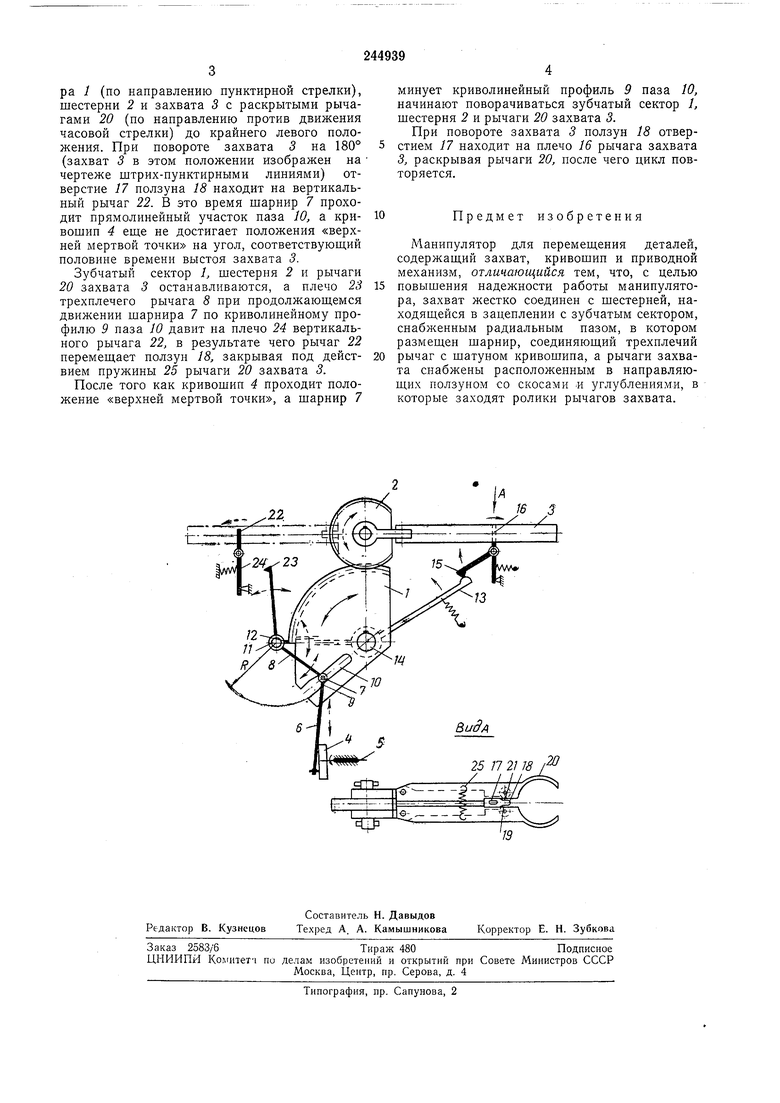
На чертеже изображена кинематическая схема описываемого манипулятора.
Манипулятор изображен в положении, соответствующем моменту окончания поворота зубчатого сектора /, шестерни 2 и захвата 3 и началу выстоя этих элементов.
При дальнейшем врашении кривошипа 4 на валу 5, еще не достигшем положения «нижней мертвой точки, на угол, соответствующий половине времени выстоя захвата 3, шатун 6 продолжает движение вниз.
Шарнир 7, соединяющий трехплечий рычаг 8 с шатуном 6 кривошипа 4, перемещается по криволинейному профилю 9 радиального паза 10 зубчатого сектора 1, описанному радиусом с центром на оси 11.
Таким образом в этот момент зубчатый сектор /, шестерня 2 и захват 3 останавливаются, а трехплечий рычаг 8 продолжает вращение вокруг оси 11, в результате чего его плечо 12 нажимает на плечо двуплечего рычага 13, свободно установленного на валу 14, который, в свою очередь, нажимает на плечо 15 рычага захвата 3.
В этот момент конец плеча 16 рычага захвата 3, находящийся в профилированном отверстии 17 ползуна 18, перемещает ползун 18, который своими скосами в передней части нажимает на ролики 19, раскрывая рычаги 20 захвата 3. При полном выстое (покое) раскрываются рычаги 20 захвата 3. Ролики 19, попадая в углубления 21 ползуна 18, фиксируют рычаги 20 захвата 3 в раскрытом положении.
В момент, когда кривошип 4 займет положение «нижней мертвой точки, шарнир 7 дойдет до конца криволинейного профиля 9 радиального паза 10, не выходя из него.
Затем шатун 6 после прохождения «нижней мертвой точки перемещается вверх, как это показано на чертеже пунктирной стрелкой, и пока шарнир 7 перемещается по профилю 9, захват 3 находится в состоянии покоя. После того как шарнир 7, минуя профиль 9, попадает на прямолинейный участок паза 10 начинается поворот зубчатого сектоpa / (по направлению пунктирной стрелки), шестерни 2 и захвата 3 с раскрытыми рычагами 20 (по направлению против движения часовой стрелки) до крайнего левого положения. При повороте захвата 5 на 180° (захват 5 в этом положении изображен на чертеже штрих-пунктирными линиями) отверстие 17 ползуна 18 находит на вертикальный рычаг 22. В это время шарнир 7 проходит прямолинейный участок паза 10, а кривошип 4 еш;е не достигает положения «верхней мертвой точки на угол, соответствуюш,ий половине времени выстоя захвата 5.
Зубчатый сектор 1, шестерня 2 и рычаги 20 захвата 3 останавливаются, а плечо 23 трехплечего рычага 8 при продолжаюш,емся движении шарнира 7 по криволинейному профилю 9 паза 10 давит на плечо 24 вертикального рычага 22, в результате чего рычаг 22 перемещает ползун 18, закрывая под действием пружины 25 рычаги 20 захвата 5.
После того как кривошип 4 проходит положение «верхней мертвой точки, а шарнир 7
минует криволинейный профиль 9 паза 10, начинают поворачиваться зубчатый сектор I, шестерня 2 и рычаги 20 захвата 5.
При повороте захвата 3 ползун 18 отверстием П находит на плечо 16 рычага захвата 3, раскрывая рычаги 20, после чего цикл повторяется.
Предмет изобретения
Манипулятор для перемеш,ения деталей, содержаш,ий захват, кривошип и приводной механизм, отличающийся тем, что, с целью
повышения надежности работы манипулятора, захват жестко соединен с шестерней, находяшейся в зацеплении с зубчатым сектором, снабженным радиальным пазом, в котором размешен шарнир, соединяющий трехплечий
рычаг с шатуном кривошипа, а рычаги захвата снабжены расположенным в направляющих ползуном со скосами и углублениями, в которые заходят ролики рычагов захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Насос | 1985 |
|
SU1343101A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1998 |
|
RU2151087C1 |
| Загрузочное устройство | 1970 |
|
SU290659A1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2142392C1 |
| Устройство для укладки предметов в тару | 1983 |
|
SU1138346A2 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| Исполнительный механизм | 1981 |
|
SU975451A1 |
,
Видл
