Известны механизмы управления интерцепторами, осуществляющие их дифференциальное отклонение для поперечного управления и одновременный выпуск с сохранением возмолсности использования при поперечном управлении. Такие механизмы бывают кинематические или пружинно-кинематические. Однако они ненадежны в работе из-за сложной кинематики и требуют дополнительной механической проводки для управления интерцепторами, когда они используются как воздушные тормоза, что приводит к утяжелению системы и ухудшает характеристики поперечного управления самолетом.
Цель данного изобретения - повысить надежность работы механизма и уменьшить его вес и габариты.
Достигается это тем, что в нем поворотная ось снабжена упорами и соединена со штоками гидравлических следящих приводов, работающих от независимых, например двух, гидросистем, а выходные качалки, расположенные иа поворотной оси, связаны со щтоками гидроцилиндров, управляемых электромагнитными клапанами.
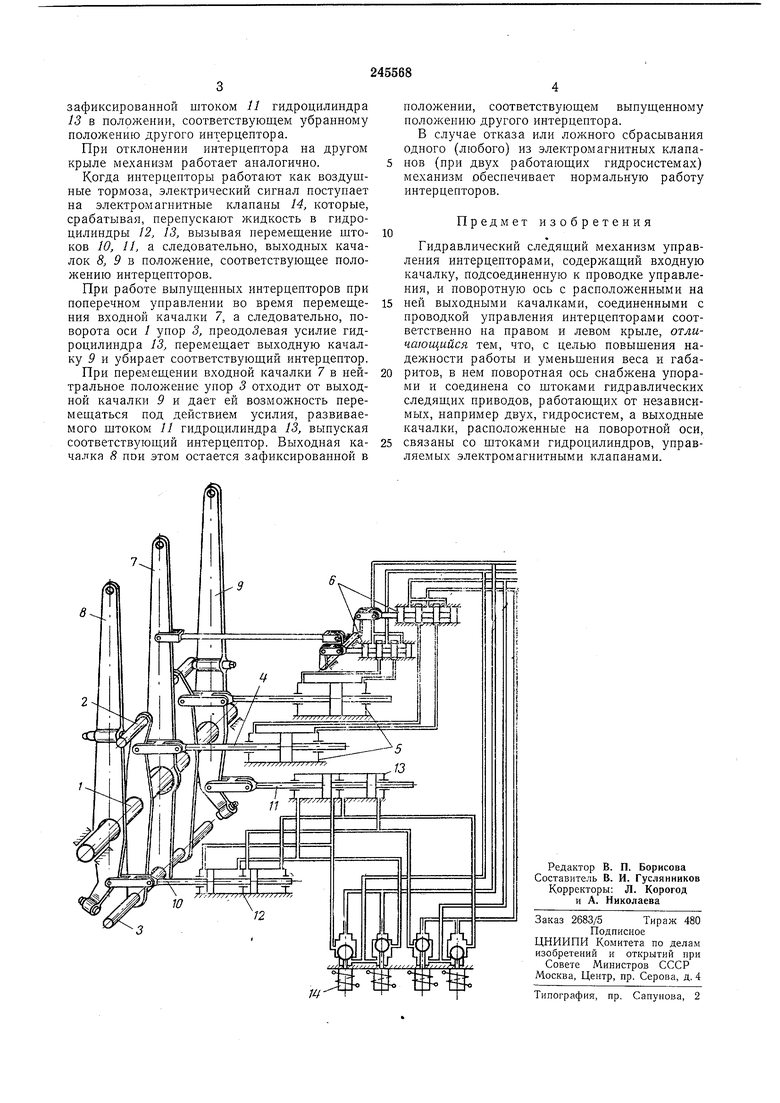
На чертеже схематически изображен описываемый механизм.
включающих гидроцилиндры 5, золотники 6 и дифференциальную качалку 7, которая является одновременно входной качалкой механизма. К качалке 7 подсоединяется проводка управления от штурвала.
На поворотной оси / расположены выходные качалки 8, 9, присоединенные к проводке управления интерцепторами соответственно на правом и левом крыле. Качалки 8, 9 связаны со штоками 10, 11 двухкамерных гидроцилиндров 12, 13, управляемых электромагнитными клапанами 14 и удерживающих эти качалки (при отсутствии управляющего сигнала) в положении, соответствующем убранному положению интерцеиторов.
Механизм работает следующим образом. При работе интерцепторов при поперечном управлении иа входную качалку 7 поступает управляющий сигнал от летчика, вызывающий перемещение щтока 4, а вместе с ним и поворот оси 1, при этом упор 2 перемещает выходную качалку 8, преодолевая усилие гидроцилиндра 12, а следовательно, отклоняет соответствующий интерцептор.
При перемещении входной качалки 7 и поворотной оси / в нейтральное полол ение упор 2 отходит от качалки 8 и дает возможность последней перемещаться под действием усилия, развиваемого штоком 10 гидроцилиндра
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| Устройство управления фрикционами гидромеханической коробки передач транспортного средства | 1986 |
|
SU1364498A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ В СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1991 |
|
RU2065825C1 |
| ПРЕСС ДЛЯ ПРАВКИ-ГИБКИ ИЗДЕЛИЙ | 1970 |
|
SU424632A1 |
| БЫСТРОХОДНОЕ СУДНО | 2009 |
|
RU2396180C1 |
| Устройство демпфирования продольных колебаний экраноплана по углу тангажа | 2015 |
|
RU2634660C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2207300C2 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1989 |
|
SU1601907A1 |
