Известны грузоподъемные траверсы, содержащие каретку с приводом ее перемещения и штанги, несущие захватные органы.
Предложенная траверса отличается тем, что каждый захватный орган выполнен в виде подковообразного сектора, закрепленного в выемке, образованной на конце штанги, наружная поверхность которого снабжена зубьями, входящими в зацепление с рейкой - штоком гидроцилиндра, смонтированного на штанге.
Это позволяет автоматизировать процесс захвата удароопасного груза и повысить безопасность работы.
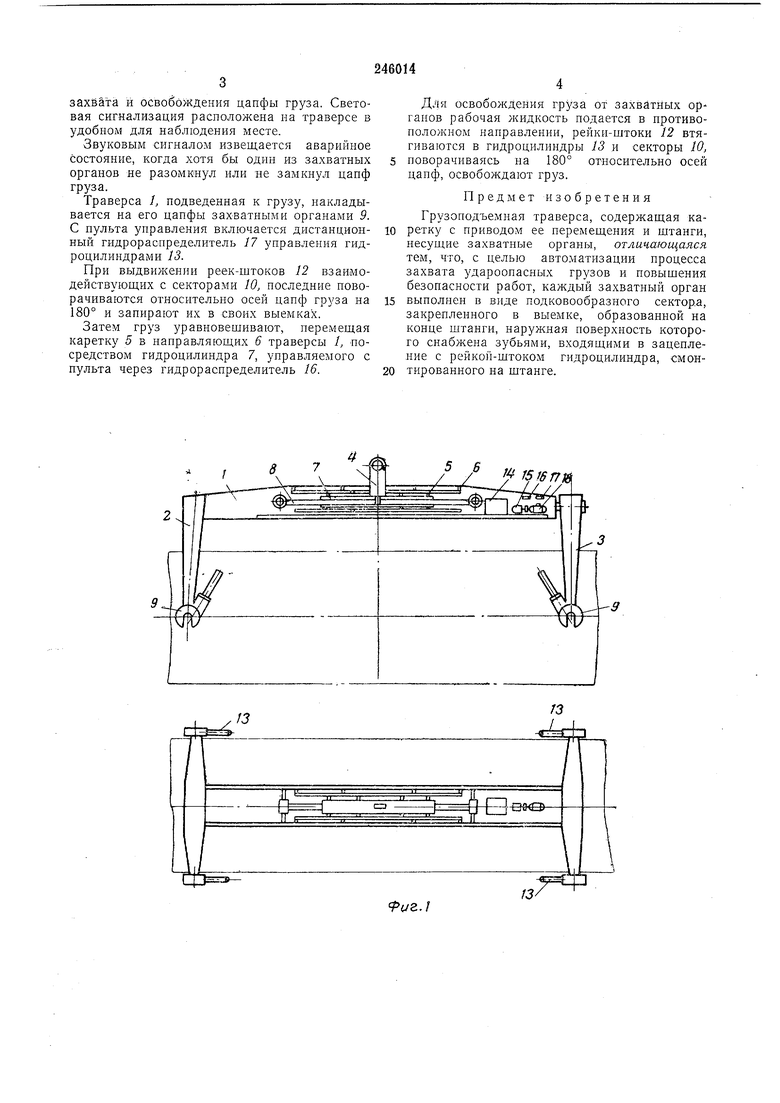
Па фиг. 1 изображена грузоподъемная траверса в двух проекциях; на фиг. 2 -захватный орган; на фиг. 3 - гидравлическая система траверсы.
Грузоподъемную траверсу 1 с жестко закрепленной штангой 2 и шарнирно закрепленной штангой 3 навешивают на крюк мостового крана или другого подъемного механизма с помощью скобы 4, жестко соединенной с кареткой 5. Штанги выполнены дугообразными. Каретка 5 может перемещаться в направляющих 6 траверсы 1 посредством гидроцилипдра 7 с двухсторопним штоком 8, жестко закрепленным обоими концами на траверсе. Корпус гидроцилиндра 7 укреплен в каретке 5. Перемещение каретки необходимо для
уравновешивания центра тяжести поднимаемого груза.
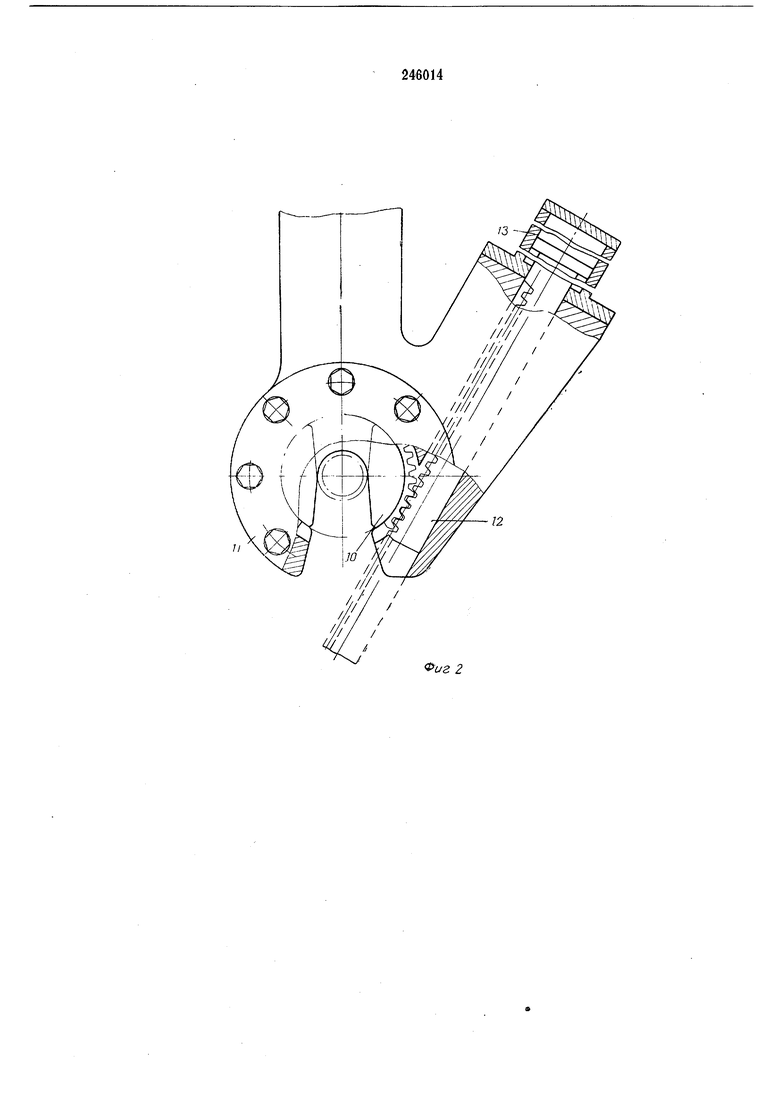
Па свободных концах V-образной формы штанг установлены захватные органы 9, состоящие из подковообразного сектора 10, закрепленного в выемках штанг, и крышки //, удерживающей -сектор 10 и прикрепленной к штанге болтами. Наружная поверхность сектора 10 выполпена с выступом, снабженным зубьями, входящими в зацепление с рейкой-штоком 12 гидроцилиндра 13, смонтированного на торце свободной ветви V-образного конца штанг 2 и 3 при помощи болтов, сквозное отверстие которой служит Направляющей для рейки-штока 12.
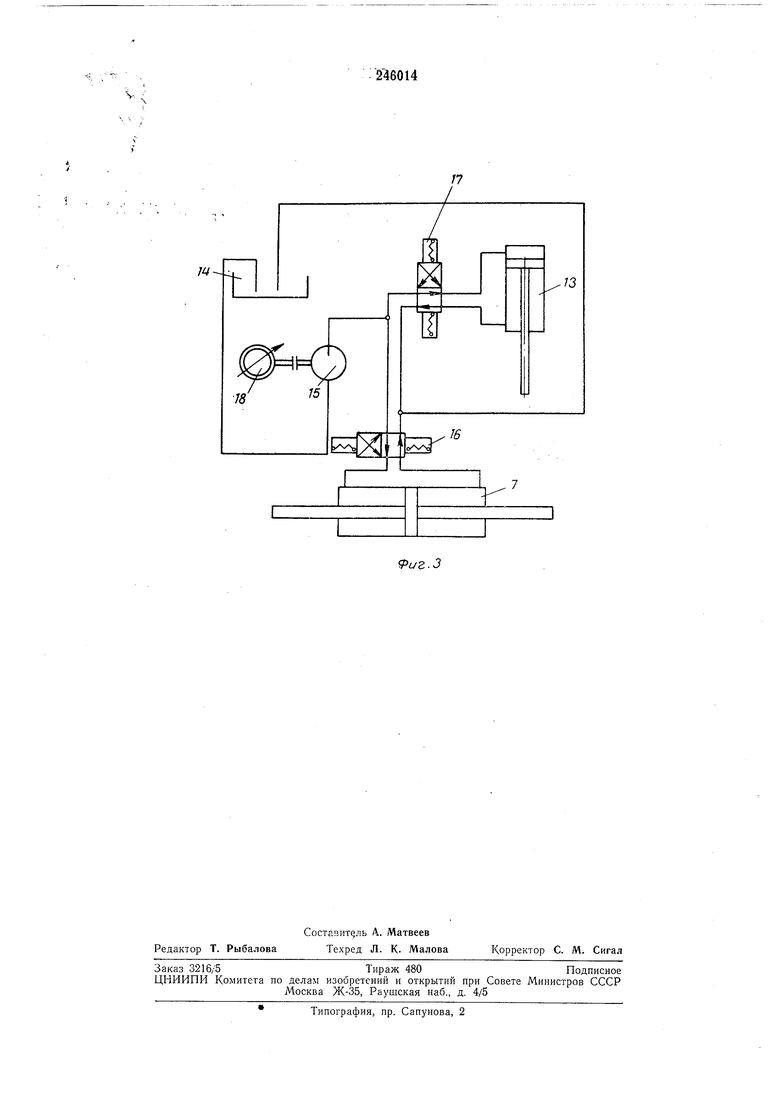
Гидравлический привод цилиндров 7 и 13, состоящий из емкости 14 для масла, гидравлического насоса 15, дистанционного гидрораспределителя 16 управления гидроцилиндром 7 перемещения каретки 5, дистанционного гидрораспределителя 17 для управления гидроцилиндрами 13 захватных органов 9 и электродвигателя 18, смонтирован внутри траверсы 1.
захвата и освобождения цапфы груза. Световая сигнализация расположена на траверсе в удобном для наблюдения месте.
Звуковым сигналом извещается аварийное состояние, когда хотя бы один из захватных органов не разомкнул или не замкнул цацф груза.
Траверса /, подведенная к грузу, накладывается на его цапфы захватными органами 9. С пульта управления включается дистанционный гидрораспределитель 17 управления гидроцилиндрами 13.
При выдвижении реек-штоков 12 взаимодействующих с секторами 10, последние поворачиваются относительно осей цапф груза на 180° и запирают их в своих выемках.
Затем груз уравновешивают, перемещая каретку 5 в направляющих 6 траверсы /, посредством гидроцилиндра 7, управляемого с нульта через гидрораспределитель 16.
Для освобождения груза от захватных органов рабочая жидкость подается в иротивоположном направлении, рейки-штоки 12 втягиваются в гидроцилиндры 13 и секторы 10, поворачиваясь на 180° относительно осей цапф, освобождают груз.
Пред мет изобретения
Грузоподъемная траверса, содержащая каретку с приводом ее перемещения и штанги, несущие захватные органы, отличающаяся тем, что, с целью автоматизации процесса захвата удароопасиых грузов и повышения безопасности работ, каждый захватный орган выполнен в виде по ковообразного сектора, закрепленного в выемке, образованной на конце штанги, наружная поверхность которого снабжена зубьями, входящими в зацепление с рейкой-штоком гидроцилиндра, смонтированного на штанге.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Захватное устройство для цилиндрических изделий | 1987 |
|
SU1409570A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Грузоподъемное устройство | 1985 |
|
SU1355597A1 |
| Захватное устройство для длинномерных изделий | 1988 |
|
SU1731718A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Гидравлический копер для вытрамбовывания котлованов в грунте | 1989 |
|
SU1715977A1 |
Zvf f А
«уг./
7/
12
Фиг 2
Т4
