Изобретение относится к подъемно- транспортному машиностроению.
Известно захватное устройство для длинномерных изделий, содержащее корпус с клинообразными вертикально расположенными наводными штырями. поворотные в вертикальной плоскости захватные органы, привод поворота захватных органов, включающий выполненные на нерабочей поверхности каждого захватного органа зубья, зубчатые колеса и рейку, и механизм фиксации захватных органов, включающий закрепленный на корпусе неподвижный элемент и кинематически связанный с последним подвижный элемент.
Известный захват не имеет возможности захватывать груз, лежащий без подложек.
Целью изобретения является расширение эксплуатационных возможностей путем захвата непосредственно с пола.
Для достижения цели в захватном устройстве для длинноременных изделий, содержащем корпус с клинообразными вертикально расположенными наводными штырями, поворотные в вертикальной плоскости захватные органы, привод поворота захватных органов, включающий выполненные на нерабочей поверхностей каждого захватного органа зубья, зубчатые колеса и рейку, и механизм фиксации захватных органов, включающий закрепленный на корпусе неподвижный элемент и кинематически связанный с последним подвижный элемент, рейка закреплена на подвижном элементе механизма фиксации, зубчатые колеса /становлены на одном валу закрепленном в корпусе, при этом одно из них находится в зацеплении с рейкой, а другое - с зубьями захватных органов.
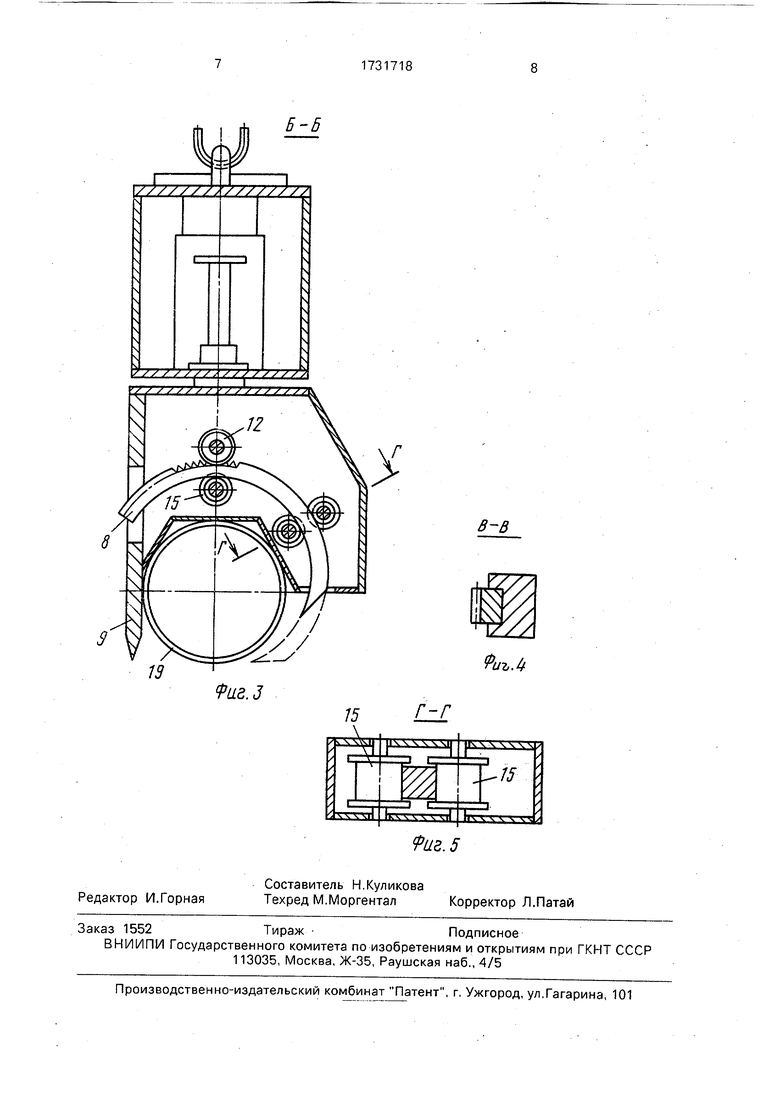
На фиг.1 показано предлагаемое устройство, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг 4 - разрез В-В на фиг.2; на фиг.5 - разрез Г-Г на фиг.З.
сл
С
vi
СА)
5 00
Захватное устройство состоит из несущей рамы, выполненной в виде траверсы 1, связанной с грузоподъемным механизмом посредством канатов 2. К траверсе 1 прикреплен ползун 3 механизма 4 фиксации. Траверса 1 связана через два штока 5 с рамой 6 и скользит при движении в направляющих втулках 7. С одной стороны в корпусе рамы 6 смонтированы два выдвижных поворотных элемента с захватными лапами 8, а с другой стороны закреплены два клинообразных штыря 9, выполняющих роль поддерживающих элементов. К ползуну 3 прикреплена рейка 10, при работе скользящая по направляющей стойке 11 и сцепленная с шестерней 12, размещенной на валу 13, на концах которого расположены шестерни 14, взаимодействующие с зубьями поворотных элементов с захватными лапами 8. Движение по дуге обеспечивается направляющими роликами 15. В нижней части рамы 6 расположены подпружиненные упоры 16, смонтированные в стаканах 17 вместе с пружинами 18. Упоры 16 дополнительно взаимодействуют с транспортируемыми трубами 19, предохраняя их от осевого перемещения, в особенности при малом диаметре. На верхней части рамы 6 закреплена стойка 20 и звездочка 21 механизма 4 фиксации.
Устройство работает следующим образом.
При захвате груза устройство опускается на цилиндрическое изделие, например на трубу 19, так, чтобы клинообразные штыри 9 проходили между захватываемой и лежащей рядом трубами, рассоединяя лежащие вплотную трубы 19. Под действием силы тяжести захватного устройства штыри 9 и рама 6 опускаются на трубу 19, при этом упоры 16 взаимодействуют с трубой, а пружины 18 сжимаются. В этом положении выдвижные захватные лапы 8 втянуты в корпус рамы 6 и сама рама 6 неподвижно зафиксирована с траверсой 1. При соприкосновении трубы 19 с корпусом рамы 6 ползун 3, упираясь в удлиненную плоскость звездочки, поворачивает ее, и она занимает горизонтальное положение. При подъеме траверса 1 вместе с ползуном 3 перемещается вверх, при этом ползун 3 перемещает и рейку 10 вверх, поворачивая
при этом шестерню 12, которая, вращаясь вместе с валом 13, приводит в движение захватные лапы 8 непосредственно через шестерни 14, которые, перекатываясь по направляющим роликам 15, обхватывают транспортируемое изделие 19 с одной стороны, прижимая его к клинообразным штырям 9. В этом положении звездочка 21 занимает вертикальное положение, и механизм 4 фиксации лопастью разгружен.
Нагрузка от силы тяжести груза и рамы 6 воспринимается рейкой 10 и ползуном 3, а от поворота в горизонтальной плоскости предохраняется штоками 5. При опускании
груза в момент касания с площадкой рама 6 со стойкой 20 останавливаются, а траверса 1 с ползуном 3 продолжают опускаться. Ползун 3, перемещаясь вниз внутри стойки 20, упирается своим упором в вырез звездочки
21 и поворачивает ее в первоначальное положение. Одновременно рейка 10, перемещаясь по направляющей стойке 11 вниз, поворачивает шестерню 17, которая через вал 13 и шестерни 14 втягивают выдвижные
захватные лапы 8 внутрь роликов, и устройство освобождается от груза 19, а механизм 4 фиксации принимает исходное положение для подъема следующего изделия.
Формула изобретения
Захватное устройство для длинномерных изделий, содержащее корпус с клинообразными вертикально расположенными наводными штырями, поворотные в вертикальной плоскости захватные органы, привод поворота захватных органов, включающий выполненные на нерабочей поверхности каждого захватного органа зубья, зубчатые колеса и рейку, и механизм
фиксации захватных органов, включающий закрепленный на корпусе неподвижный элемент и кинематически связанный с последним подвижный элемент, отличающееся тем, что, с целью расширения
эксплуатационных возможностей путем захвата непосредственно с пола, рейка закреплена на подвижном элементе механизма фиксации, зубчатые колеса установлены на одном валу, закрепленном в
корпусе, при этом одно из них находится в зацеплении с рейкой, а другие - с зубьями захватных органов.
14)
(J
I
-ft-J w

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| Траверса для кантования грузов | 1989 |
|
SU1703601A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захват для изделий | 1979 |
|
SU918246A1 |
| Многофункциональный плуг с поворотным брусом | 2018 |
|
RU2682057C1 |
| Захват-кантователь | 1977 |
|
SU839970A1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |

Назначение: изобретение относится к подъемно-транспортному машиностроению. Сущность изобретения: захватное устройство содержит несущую раму, выполненную в виде траверсы. Траверса связана с нижней рамой через два штока. В нижней раме расположены захватные органы, два клинообразных штыря, постоянно выдвинутых, и две выдвижные захватные лапы. Лапы приводятся в действие рейкой, связанной с ползуном механизма фиксации. 5 ил.
ъ-t
«3
b
6-6
Pue.J
з-з
т
т
Фиъ.Ь
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
