Данное изобретение относится к области автоматического управления.
Известные способы самонастройки коэффициента усиления регулятора в системе с переменной структурой не обеспечивают высокой помехозащищенности системы при нелинейном регуляторе.
Предложенный способ позволяет увеличить запас устойчивости системы с переменными параметрами при обеспечении ее помехозащищенности.
Это достигается за счет того, что фиксируют момент начала возникновения скользящего режима по наличию сигнала на выходе избирательного фильтра, настроенного на его частоту, измеряют продолжительность этого режима, уменьшают коэффициент усиления регулятора , при достижении минимально допустимой продолжительности режима и увеличивают коэффициент усиления с ростом продолжительности скользящего режима до момента срыва режима, причем формируют каждое новое значение коэффициента усиления пропорционально его предыдущему значению.
Объект управления описывается дифференциальным уравнением
M(i) -возмущающее воздействие, b(t), Ci(f)-переменные коэффициенты.
Исполнительный орган Г„о-8 + 8 /Сно- /.
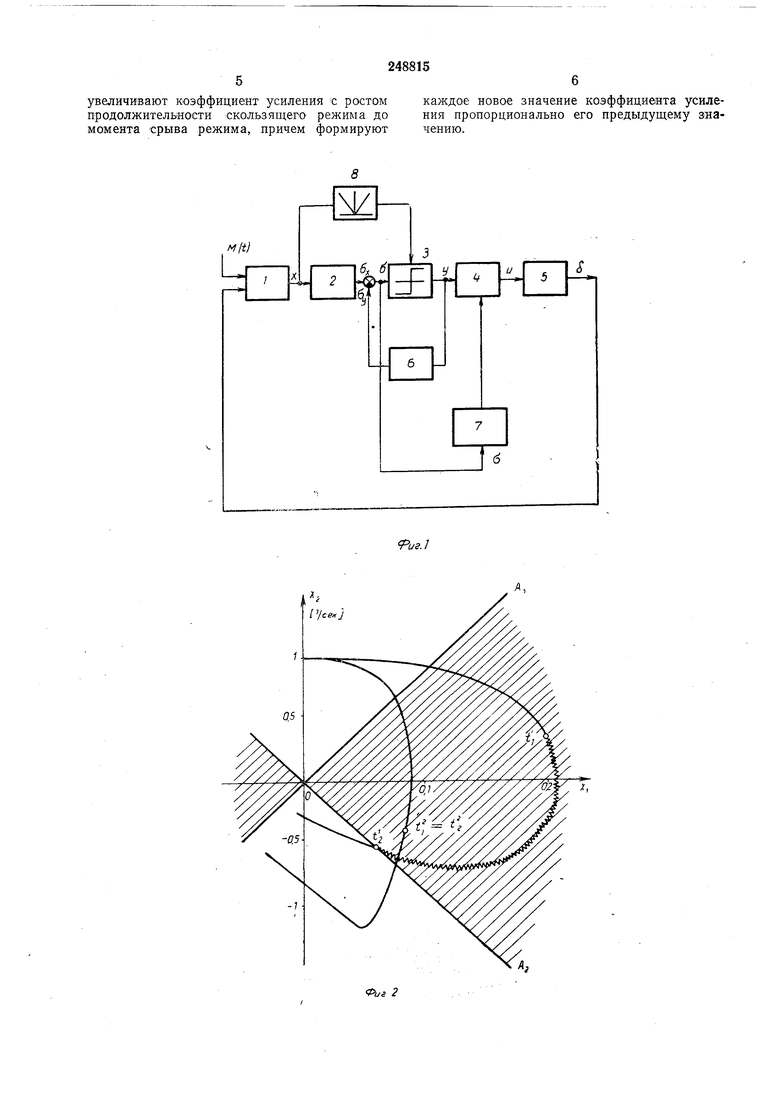
На фиг. 1 изображена структурная схема системы с переменными параметрами, где показаны объект управления /, дифференцирующий контур 2, релейный элемент 3, усилитель 4, исполнительный орган 5, фильтр обратной связи 6, блок самонастройки 7, блок вычисления модуля сигнала 8, постоянная времени исполнительного органа 7„о, коэффициент пропорциональности /Сно , соответственно, входной и выходной сигналы исполнительного органа а, U, сигналы , Оу на выходе блоков 2, 6, сигнал о на входе блока 3.
Построение управления с линией переключения вида
S cx+x,
где с - некоторая постоянная, практически невозможно, так как получение «чистых производных затруднительно, и, кроме того, в системе При действии возмущений М появляются автоколебания, которые существенно ухудшают динамику системы, что, в свою очередь, объясняется невыполнением условий скользящего режима при действии возмущений. Поэтому основной контур управления строится по -принципу коммутируемых фильтров. Нелинейное корректирующее звено, состоящее из звеньев 2, 3, 6 и 8, реализует закон управления вида: sign о; а с - ау ,, + а (71Х+ЛГ) + у - 1У .у, где a-i, «2, Ti, TI, Ki - постоянные коэффициенты, JKc - переменный коэффициент, вычисляемый блоком самонастройки. Как следует из приведенных уравнений, информация о сигнале ошибки и ее производной может быть получена с помощью обычного дифференцирующего контура 2 на / С-элементах. В системе с таким законом управления на фазовой плоскости и существует сектор скользящего режима, ограничений двумя- прямыми AI и А2 (см. фиг. 2). Параметры нелинейного корректирующего звена выбираются так, чтобы прямая AI была расположена выще оси ординат Х. При таком выборе прямой AI в системе исключается возможность срыва скользящего режима в установивщемся состоянии при действии возмущении М, а в переходных процессах существует частично скльзящий режим. Хотя при этом возможно более чем одно перерегулирование, но это, в некоторой степени, компенсируется повышенной быстротой затухания процесса. При увеличении коэффициента усиления объекта b фазовые траектории системы претерпевают такое изменение, что время движения в скользящем режиме уменьшается. Фазовые траектории для системы (фиг. 1) без блока самонастройки показаны на фиг. 2, где через t( обозначено время начала скользящего режима при i 6i а /g-время срыва (конца) скользящего режима, а t, и время начала и конца скользящего режима при , при . Как видно при b bz t | , т. е, в системе происходит лишь одно переключение. Между временем существования скользящего режима /с 4-и и коэффициентом b существует определенная зависимость. Для улучщения динамических качеств системы в зависимости от Т, -следует изменять не прямые A-i ,и Az, а коэффициент усиления усилителя 4 после блока 3, т. е. коэффициент КсВ блоке 7 производится фиксация времени /1 и tz. В момент 2 производится вычисление времени существования скользящего режима Уд, и если оно оказывается меньше заданной величины то производится уменьшение коэффициента Кс, что приводит к уменьшению общего коэффициента в системе. Однако в процессе работы системы может появиться необходимость увеличения коэффициента Кс (при уменьшении Ь). Поэтому в блоке 7 предусмотрена возможность увеличение /Сс- С этой целью в этом блоке в момент t включается контроль длительности текущего времени существования скользящего режима Гс/. Как только Г« достигает некоторой заданной величины 7™ Производит-ся увеличение /Сс, а контроль текущего времени существования скользящего режима продолжается. Если TCI достигает новой заданной величинь () , то снова происходит увеличение /Сс и т. д. до появления срыва скользящего режима. При изменении параметров объекта блок самонастройки в процессе работы поддерживает время существования скользящего режима в определенных пределах, т. е. - Tf. При этом в системе поддерживается примерно постоянное значение общего коэффициента усиления, что расширяет запасы устойчивости, а также обеспечивает определенные постоянные динамические и статические характеристики системы. Момент возникновения и срыва скользящего режима может фиксироваться по появлению напряжения на выходе линейного фильтра, настроенного на частоты скользящего режима. Изменение времени Т и , а также необходимые логические операции по сракнению. могут быть выполнены на импульсных логических элементах. Для улучшения динамики процесса адаптации коэффициент Дс изменяется пропорционально предыдущему значению. Например, если необходимо уменьшить /Сс, то берется его предыдущее значение и умножается на постоянный коэффициент . Таким образом, калодый раз /С будет уменьшаться на одно и то количество процентов от .предыдущего значения. Так же работает блок адаптации при увеличении К. В этом случае предыдущее значение Кс умножается яа постоянный коэффициент . Предмет изобретения Способ самонастройки коэффициеята усилеия нелинейного регулятора, отличающийся ем, что, с целью увеличения запаса устойчиости системы с переменными параметрами ри обеспечении ее помехозащищенности, фикируют момент начала возникновения скольяшего режима по наличию сигнала на выоде избирательного фильтра, настроенного а его частоту, измеряют продолжительность того режима, уменьшают коэффициент усиения регулятора при достижении минимальо допустимой продолжительности режима и 56
увеличивают коэффициент усиления с ростом каждое новое значение коэффициента усилепродолжительности скользящего режима до ния пропорционально его предыдущему зиамомента срыва режима, причем формируют чению.г j j
248815 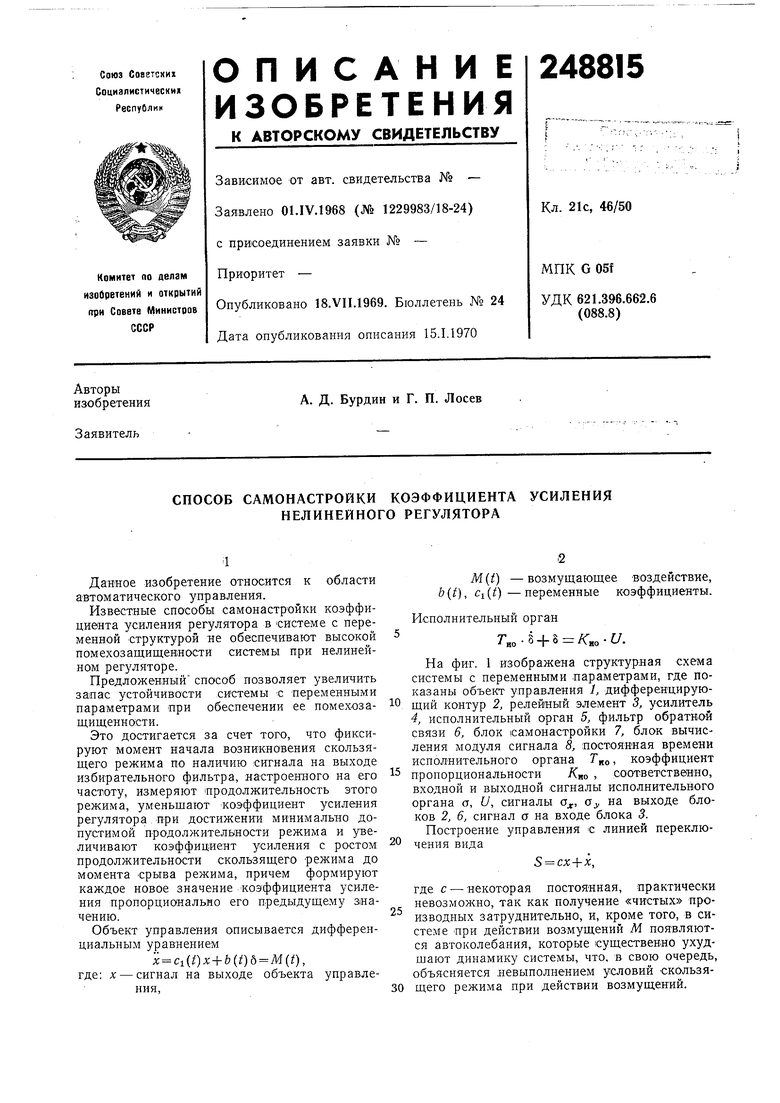
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Адаптивная система управления электромеханическим устройством торможения колеса | 2016 |
|
RU2643305C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |