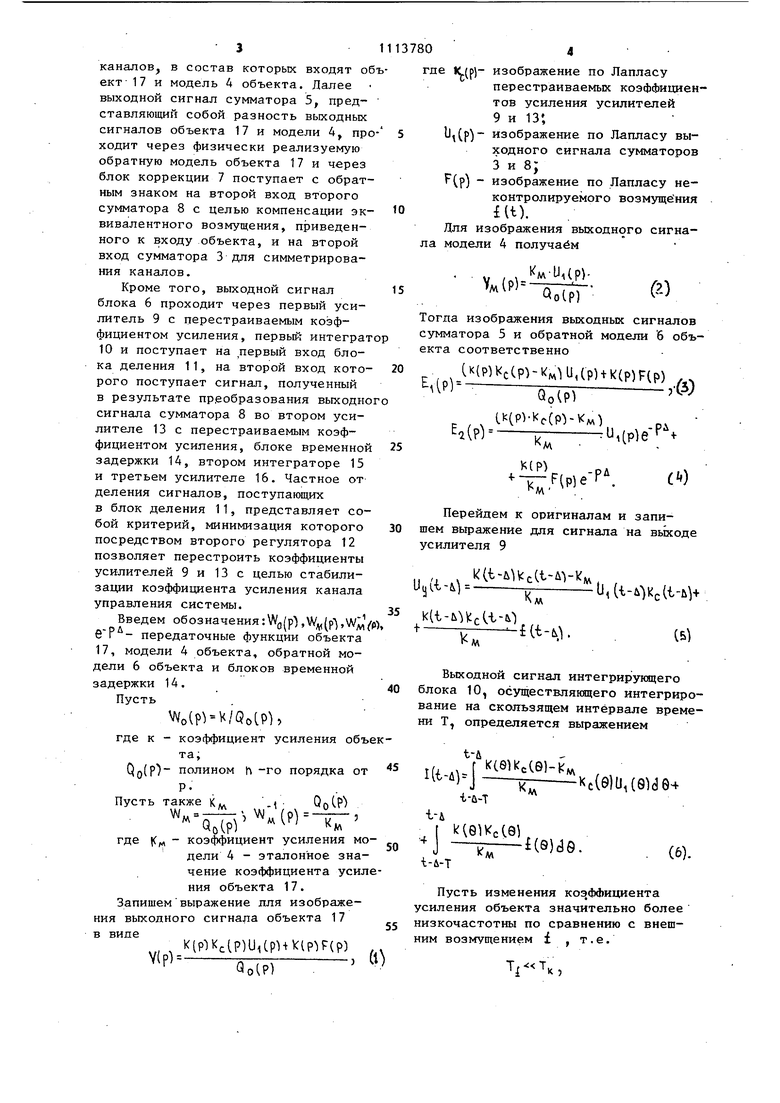
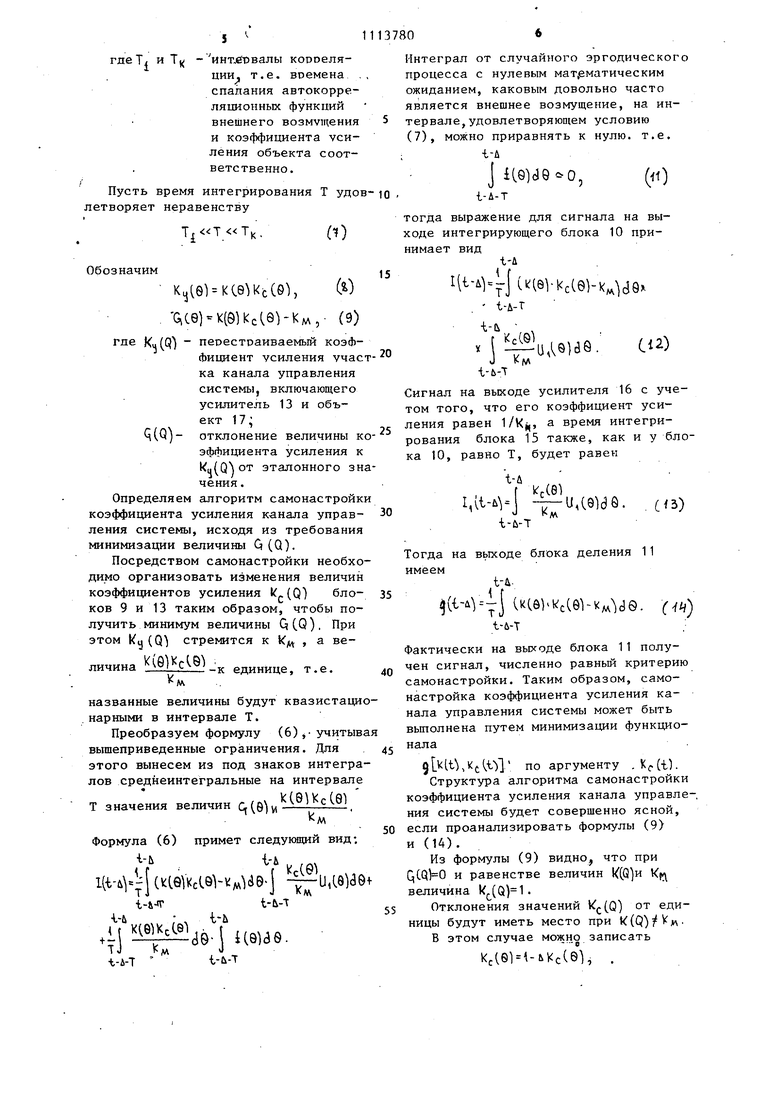
Изобретение относится к системам автоматического управления и может найти применение при управлении объектами с переменными параметрами и неконтролируемыми возмущениями. По основному авт.ев,№824142 известна система автоматического управ ления содержащая модель объекта последовательно соединенные первый сумматор регулятор и второй сумматор а также последовательно соединенные третий сумматор обратную модель объекта управления, корректирующее звено и четвертый сумматор, вход которого соединен с выходом регулятора и входом второго сумматора, а вькод через модель объекта с одним из входов третьего сумматора, другой вход которого соединен с выходом объекта управления и одним из входов первого сумматора, выход обратной модели объекта соединен с одним из входов второго сумматора Л . Однако известная система автоматического управления обладает высокой чувствительностью к изменениям параметров объекта и к неконтролируемым возмущениям и, как следст вие, низким качеством управления. Цель изобретения - расширение области устойчивости и повышение качес ва управлейия путем снижения чувстви тельности системы к изменениям коэффициента усиления объекта. тт Поставленная цель достигается тем что в систему автоматического управл ния введены последовательно соединен ные первый усилитель, первый интегра тор, блок деления и второй регулятор а также последовательно соединенные второй усилитель, второй блок задерж ки, второй интегратор и третий усилитель, выход- которого соединен с вт рым входом блока деления, выход второго регулятора соединен с первыми входами первого и второго усилителей второй вход первого усилителя соединен с выходом блока обратной модели и с входом корректирующего блока, второй вход второго усилителя соединен с выходом второго сумматора, а вход объекта связан с выходом второг усилителя и с входом блока задержки. На фиг.1. представлена структурная схема системы автоматического управл ния; на фиг.2 - схема реализации уси лителей. Структурная схема (фиг.U включает в себя последовательно соединенные первый сумматор 1, первый регулятор 2, четвертый сумматор 3, блок прямой модели 4 объекта, третий сумматор 5, блок обратной модели 6 объекта, корректирующий блок 7, выходной сигнал которого с обратным знаком поступает на вторые входы сумматоров 3 и 8, а выходной сигнал блока прямой модели 4 поступает на первый вход третьего сумматора 5 с обратным знаком, и последовательно соединенные первый усилитель 9, первый интегратор 10, блок деления 11, второй регулятор 12, выход которого соединен с первыми входами усилителей 9 и 13, а также последовательно соединенные второй усилитель 13, блок временной задержки 14. второй интегратор 15,, третий усилитель 16 выход которого соединен с вторым входом блока пеления 11J вход объекта 17 соединен с выходом второго усилителя 13 и входом блока временной задержки 14j выход объекта 17 соединен с вторыми входами первого 1 и третьего 5 сумматоровJ причем на второй вход первого сумматора 1 выходной сигнал объекта поступает с обратным зиаKOMj вход первого усилителя 9 соединен с выходом блока обратной модели 6 и входом блока коррекции 7j вход второго усилителя 14 соединен с выходом второго сумматора 8, первьй вход которого подключен к выходу первого регулятора 2 и первому входу четвертого сумматора 3, на первый вход сумматора 1 Поступает сигнал задания. Предлагаемая система управления работает следующим образом. Для снижения чувствительности системы управления к изменениям коэффициента усиления объекта необходимо стабилизировать коэффициент усиления канала управления системы. Для получения алгоритма самонастройки коэффициента усиления канала управления системы образованы два канала прохождения выходного сигнала регулятора 2, первый из которых включает в себя четвертый сумматор 3 и блок прямой модели 4, а второй канал - второй сумматор 8, второй усилитель 13 и объект управления 17. В сумматоре 5 образуется разность выходных сигналов второго и первого каналов, в состав которых входят объект- 17 и модель А объекта. Далее выходной сигнал сумматора 5, представляющий собой разность выходных сигналов объекта 17 и модели 4 про- 5 ходит через физически реализуемую обратную модель объекта 17 и через блок коррекции 7 поступает с обратным знаком на второй вход второго сумматора 8 с целью компенсации эк- О вивалентного возмущения, приведенного к входу объекта, и на второй вход сумматора 3 для симметрирования каналов. Кроме того, выходной сигнал 15 блока 6 проходит через первый усилитель 9 с перестраиваемым коэффициентом усиления, первый интегратор 10 и поступает на первый вход блока деления 11, на второй вход кото- 20 рого поступает сигнал, полученный в результате преобразования выходного сигнала сумматора 8 во втором усилителе 13 с перестраиваемым коэффициентом усиления, блоке временной 25 задержки 14, втором интеграторе 15 и третьем усилителе 16. Частное от деления сигналов, поступающих в блок деления 11, представляет собой критерий, минимизация которого 30 посредством второго регулятора 12 позволяет перестроить коэффициенты усилителей 9 и 13 с целью стабилизации коэффициента усиления канала управления системы.35 Введем обозначения :W(,(p) ,W;v,() передаточные функции объекта 17, модели 4 объекта, обратной модели 6 объекта и блоков временной задержки 14.40 WolPl /QolP), где к - коэффициент усиления объекта, QQIP)- полином п -го порядка от р. Пусть также К . Qo.P) где КАЛ коэффициент усиления модели 4 - эталонное значение коэффициента усиления объекта 17. Запишемвыражение для изображения выходного сигнала объекта 17 TJ ни ГТ6 K(PlKcl|)U,(Pl Klp1F(p) Ylp). 1113780 гд ла То су ек v ше ус u,a kl ,бл ва ни l ус ни ни 1С.(Р)- изображение по Лапласу перестраиваемых коэффициентов усиления усилителей 9 и 13; ll,(p)- изображение по Лапласу выходного сигнала сумматоров 3 и 8; F(p) - изображение по Лапласу неконтролируемого возмущения Для изображения выходного сигнамодели 4 получаем V /nbl iliiliPl да изображения выходных сигналов матора 5 и обратной модели 6 объа соответственно ()KcCp),(p)tk(p)F(p) .. P) Л-77Т- (i) QO(P) (.HPVKeCPVKw-) u,p)ef 7(Р) .Vl.e-P. .) Перейдем к оригиналам и запивыражение для сигнала на вь1Ьсоде лителя 9 k(i-uWcCt-UVl M - U,U-i)Kc(t-M+ Клл -My cC-b-O -i(i-L Выходной сигнал интегрирующего ка 10, осуществлянлцего интегрироие на скользящем интервале времеТ, определяется выражением t-u K(81KeCe)-Kw -u)-J (e)u,(9)de4 |( (9)(3в. Пусть изменения коэ.ФФициента ления объекта значительно более кочастотны по сравнению с внешвозмущение.м f , т.е. TI-, где Т. и Т -инт,ет)валы короеляции, т.е. времена , спадания автокорреляционных функций внешнего возмущения и коэффициента усиления объекта соответственно. Пусть время интегрирования Т удов летворяет неравенству Обозначим к.|10) ксе)Кс(е, () GiCe)-K(6),- (9) где Ku(Q) перестраиваемьй коэффициент усиления учас ка канала управления системы, включающего усилитель 13 и объект 17; Q(Q)- отклонение величины к эффициента усиления к (Q)or эталонного зн чения. Определяем алгоритм самонастройк коэффициента усиления канала управления системы, исходя из требования минимизации величины 0(Q). Посредством самонастройки необхо димо организовать изменения величин коэффициентов усиления I,.(Q) блоков 9 и 13 таким образом, чтобы получить минимум величины QCQ), При этом ky (Q стремится к 1 , а век(0)) личина ..S-к единице, т.е. названные величины будут квазистацио нарными в интервале Т. Преобразуем формулу (6)-учитыва вышеприведенные ограничения. Для этого вынесем из под знаков интегралов среднеинтегральные на интервале f Т значения величин C((eU- Формула (6) примет следуюпшй вид: i-b - ccev I( C iteVl eCQV MWS- ,l9)39 t-4-«Vt-b-V ,l i ы }/fиадв. TJ ЬДА J t-i-T t-ii-T Интеграл от случайного эргодического процесса с нулевым мат.ематическим ожиданием, каковым довольно часто является внешнее возмущение, на интервале, удовлетворяюп1ем условию (7), можно приравнять к нулю. т.е. Ii-A J KeidQ o, тогда выражение для сигнала на выходе интегрирующего блока 10 принимает вид Ut-Ai i-j(i().. ., cu) Сигнал на выходе усилителя 16 с учетом того, что его коэффициент усиления равен 1/Kj,, а время интегрирования блока 15 также, как и у блока 10, равно Т, будет равен ,(i-t.y U,O)dQ. . ) Тогда на вькоде блока деления 11 имеем (i-uV--j ((Q,(. (t,-) t-u-T.Фактически на выходе блока 11 получен сигнал, численно равный критерию самонастройки. Таким образом, самонастройка коэффициента усиления канала управления системы может быть вьшолнена путем минимизации функционала) по аргументу .Кс-ШСтруктура алгоритма самонастройки коэффициента усиления канала управле-, ния системы будет совершенно ясной, если проанализировать формулы (9) и (14). Из формулы (9) видно, что при и равенстве величин 1(0)и Кр; величина k(Q)1 . Отклонения значений ,-(0) от единицы будут иметь место при K(Q)/V. Б этом случае можно записать 1 Д81М-ь1 сСб1, .
где bVc(Q) - сигнал самонастройки,
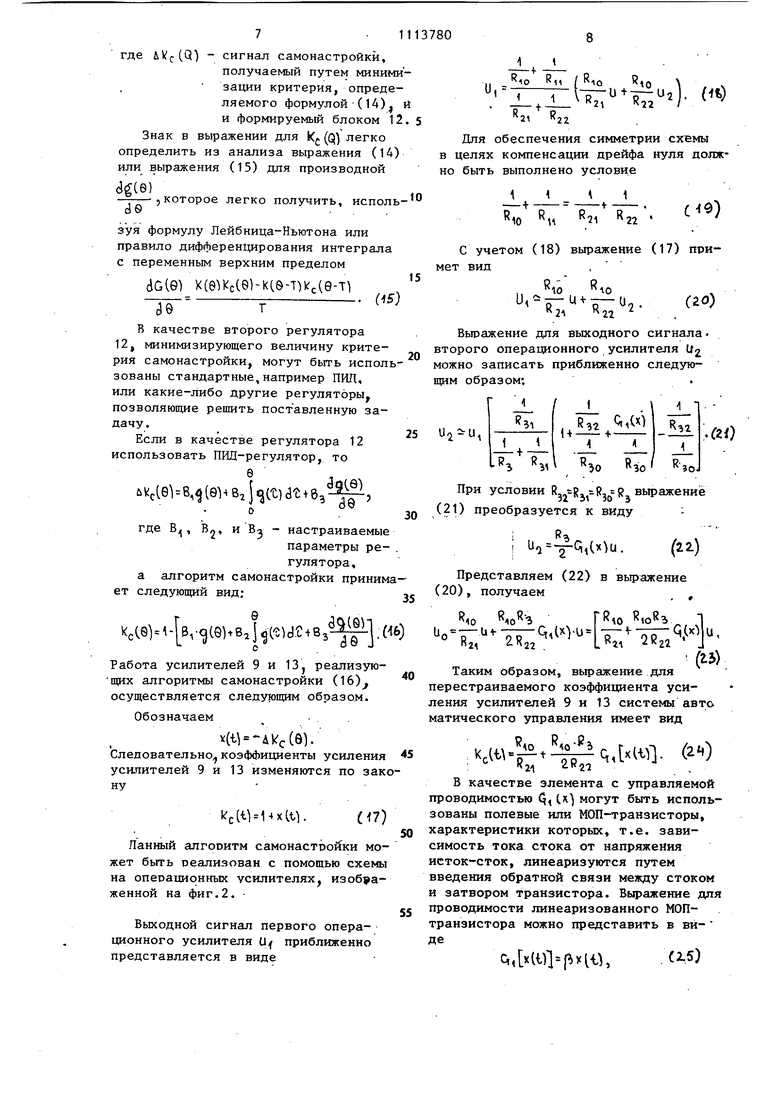
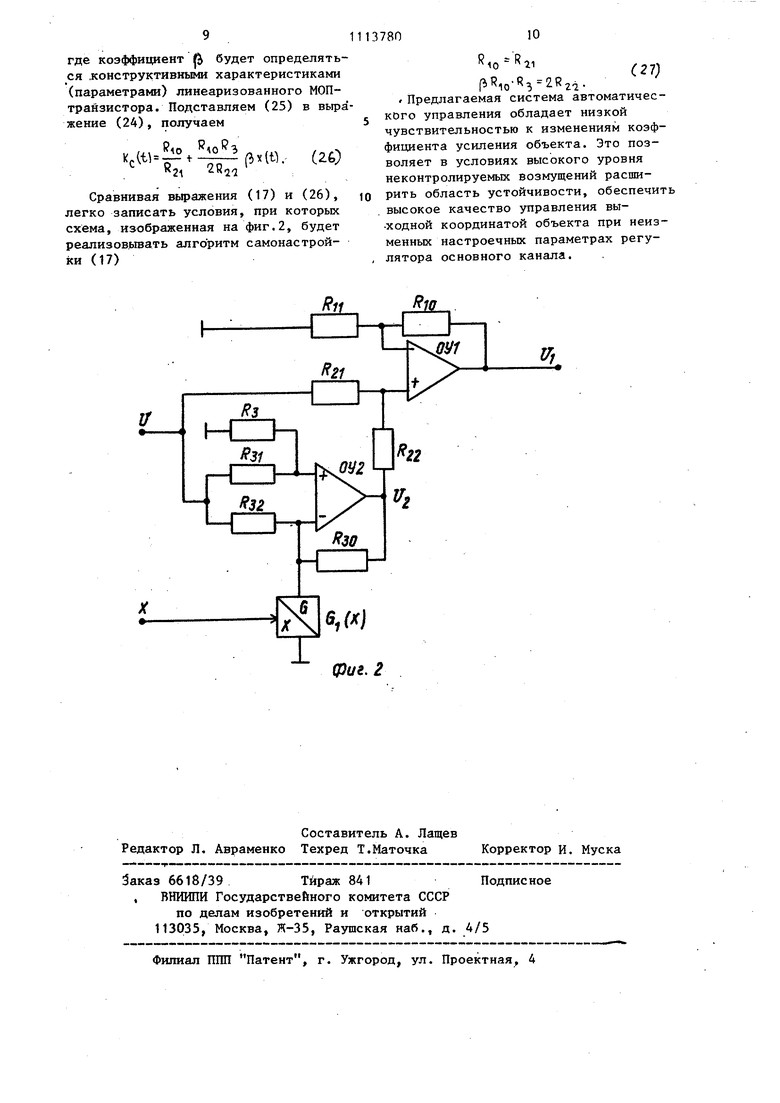
получаемый путем минимизации критерия, определяемого формулой (14) и и формируемый блоком 12.5 Знак в выражении для К (Q) легко определить из анализа выражения (14) или выражения (15) для производной 5 которое легко получить, испол зуя формулу Лейбница-Ньютона или правило дифференцирования интеграла с переменным верхним пределом dG(e) к((9)-пэ-Л)с(9-т1 J9 Т В качестве второго регулятора 12J минимизирующего величину критерия самонастройки, могут быть испол зованы стандартные,например ПИД, или какие-либо другие регуляторы позволяющие решить поставленную задачу. Если в качестве регулятора 12 использовать ПИД-регулятор, то ukc(,(e 82Ji5Ct)a + о где В, Вп, и На - настраиваемые параметры регулятора, а алгоритм самонастройки приним ет следующий вид; Г dCitSH .,C0)n|B,(G).B,j(.).. Работа усилителей 9 и 13, реализующих алгоритмы самонастройки (16) осуществляется следующим образом. Обозначаем . vW -Al(Q). Следовательно коэффициенты усиления усилителей 9 и 13 изменяются по зак ну . Данный алгоритм самонастройки мо жет быть реализован с помощью схемы на операционных усилителях, изображенной на фиг.2. Выходной сигнал первого операционного усилителя U| приближенно представляется в виде
,O R,o , V
Л1Л1 к7/).
2
2Z
Для обеспечения симметрии схемы в целях компенсации дрейфа нуля должно быть выполнено условие -L 21 R С учетом (18) выражение (17) примет вид, О Q ао 10 . ГВыражение для выходного сигнала. второго операционного усилителя 1/2 можно записать приближенно следующим образом;. , При условии R вьфажениё (21) преобразуется к виду I Y,. (2Z) Представляем (22) в выражение (20), получаем, , о 1 .-Q,(x).u -.,(x)Ju, Таким образом, выражение для перестраиваемого коэффициента усиления усилителей 9 и 13 системы авто матического управления имеет вид В качестве элемента с управляемой проводимостью (, (J(. могут быть использованы полевые или МОП-транзисторы, характеристики которых, т.е. зависимость тока стока от напряжения исток-сток, линеаризуются путем введения обратной связи между стоком и затвором транзистора. Выражение для проводимости линеаризованного МОПтранзистора можно представить в вйдеC,x(t) fixti), .(5) где коэффициент А будет определяться .конструктивными характеристиками (параметрами) линеаризованного МОПтранзистора. Подставляем (25) в выра жение (24), получаем fixW, (2&) «eW, Сравнивая выражения (17) и (26), легко записать условия, при которых схема, изображенная на фиг.2, будет реализовьгаать алгоритм самонастройки (17)
М
ОУ1
L R,.-R. 40 (Ь 10-«3 27 Предлагаемая система автоматического управления обладает низкой чувствительностью к изменениям коэффициента усиления объекта. Это позволяет в условиях высокого уровня неконтролируемых возмущений расширить область устойчивости, обеспечить высокое качество управления выходной координатой объекта при неизменных настроечных параметрах регулятора основного канала.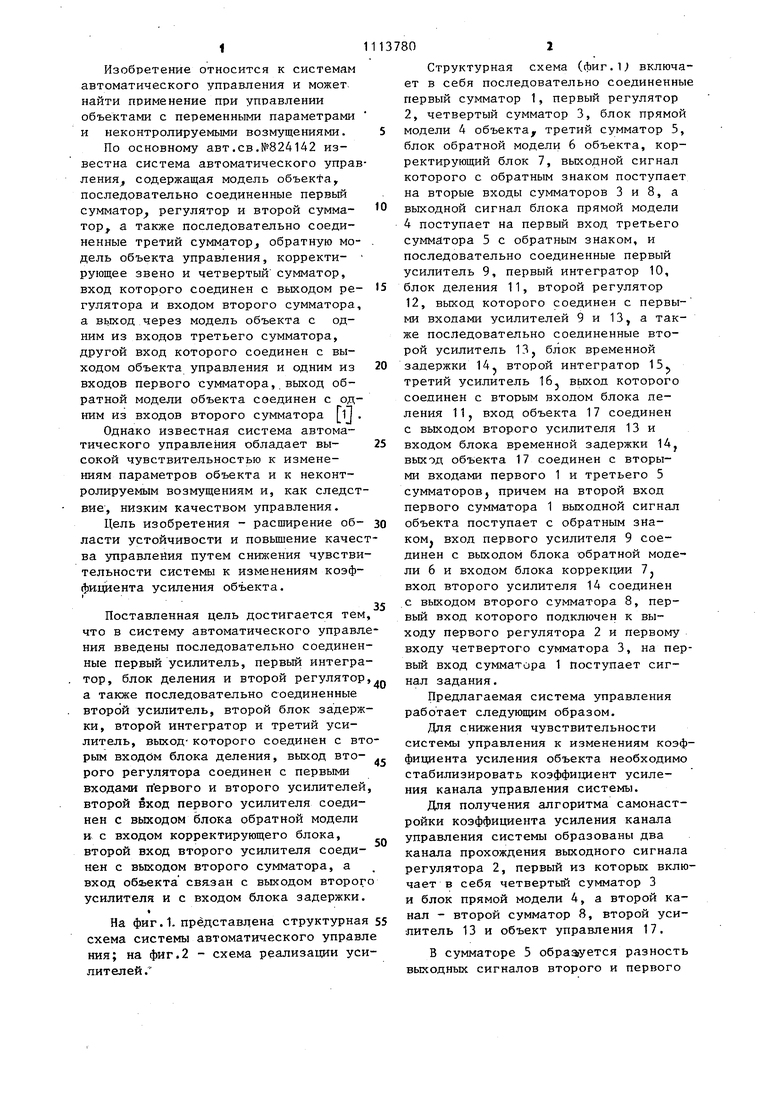
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Система управления для объектов с запаздыванием | 1985 |
|
SU1280568A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ по авт.св.Р 824142, о тличающаяся тем, что с целью расширения области устойчивости и повышения качества управления системы, в нее введены последовательно соединенные первый усилитель, первый интегратор блок деления и второй регулятор, а также последовательно соединенные второй усилитель, второй блок задержки, второй интегратор и третий усилитель, выход которого соединен с вторым входом блока деления, выход второго регулятора соединен с первыми входами первого и второго усилителей, второй вход первого усилителя соединен с. выходом блока обратной модели и с входом корректирующего блокаJ второй вход второго усилителя соединен с выходом второго сумматора, а вход объекта связан с выходом второго усилителя и с входом блока задержки.§
Г
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического управления | 1979 |
|
SU824142A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
