1
fB
00
со со
Изобретение относится к автоматике и может найти применение при управлении нестационарными объектами в услови11х действия неконтролируемых возмущений в химической, нефтехимической и металлургической отраслях промышленности.
Целью изобретения является повышение точности и устойчивости систе- мы в условиях действия помех значительной интенсивности и изменения параметров объектов управления.
На фиг.1 представлена структурная схема предлагаемой адаптивной систе- мы управления; на фиг.2 схема усилителя с переменным коэффициентом усиления; на фиг.З - схема блока прогноза; на фиг.4 - схема фильтров.
Адаптивная система управления со- держит задатчик 1 входного сигнала, первый сумматор 2, первый регулятор 3, усилитель 4, объект 5 управления, модель 6 объекта, первый фильтр 7, первый делитель 8, второй сумматор 9 блок 10 прогноза, второй регулятор II, блок 12 ограничения, формирователь 13 сигналов уровня ограничения, формирователь 14 единичного сигнала, второй 15 фильтр, второй делитель 16, умножитель 17, третий сумматор 18, третий регулятор 19 и четвертый сумматор 20. Усилитель 4 (с переменньм коэффициентом усиления) содержит сумматор 2 и умножитель 22.
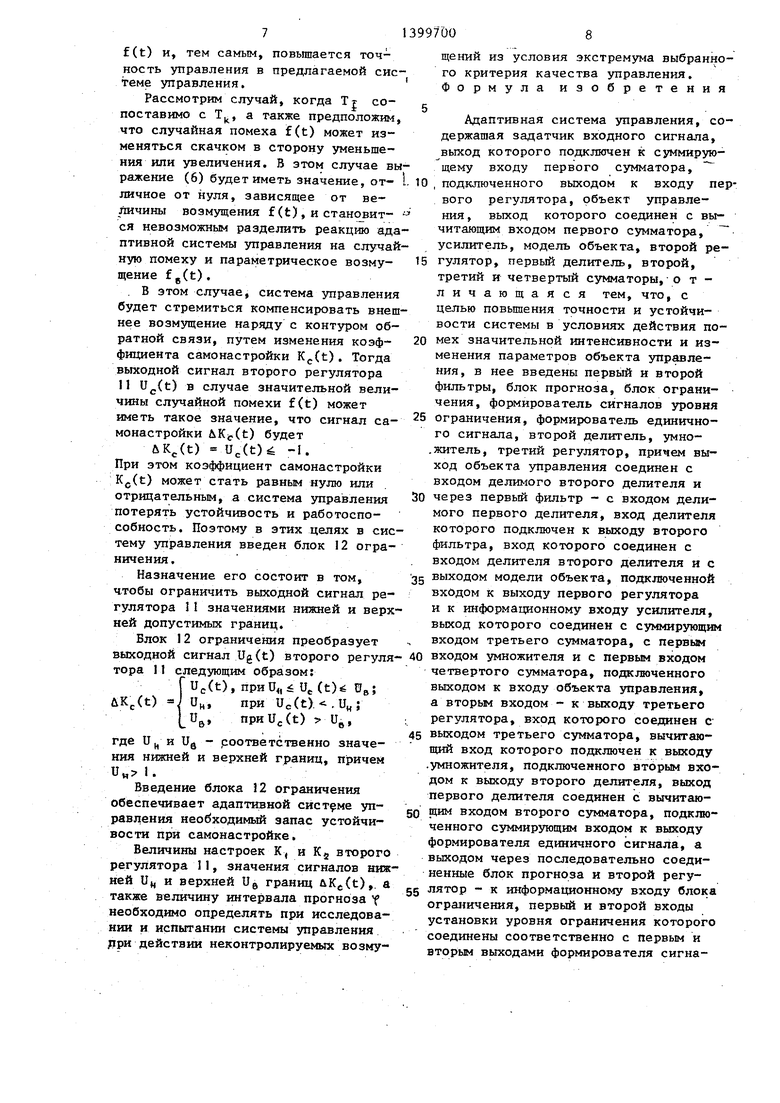
Блок 10 прогноза включает последовательно соединенные дифференциаторы 23 и 24,усилитель 25, сумматор 26 и усилитель 27.
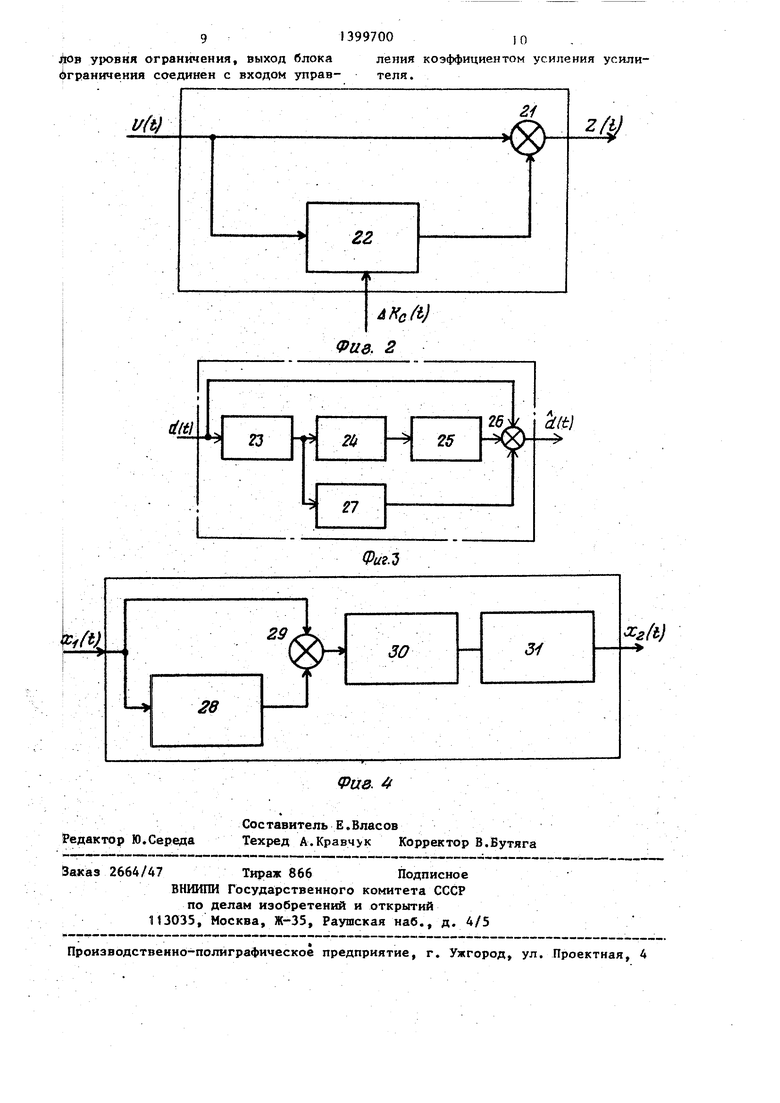
Первый 7 и второй 15 фильтры, вы- полняющие усреднение сигнала на скользящем интервале времени Т, включают блок 28 задержки, сумматор 29, интегратор 30 и усилитель 31.
Делители 8 и 16 сохраняют работо- способность при величине сигнала делителя, равной нулю, поскольку содержат цепи ограничения выходного сигнала.
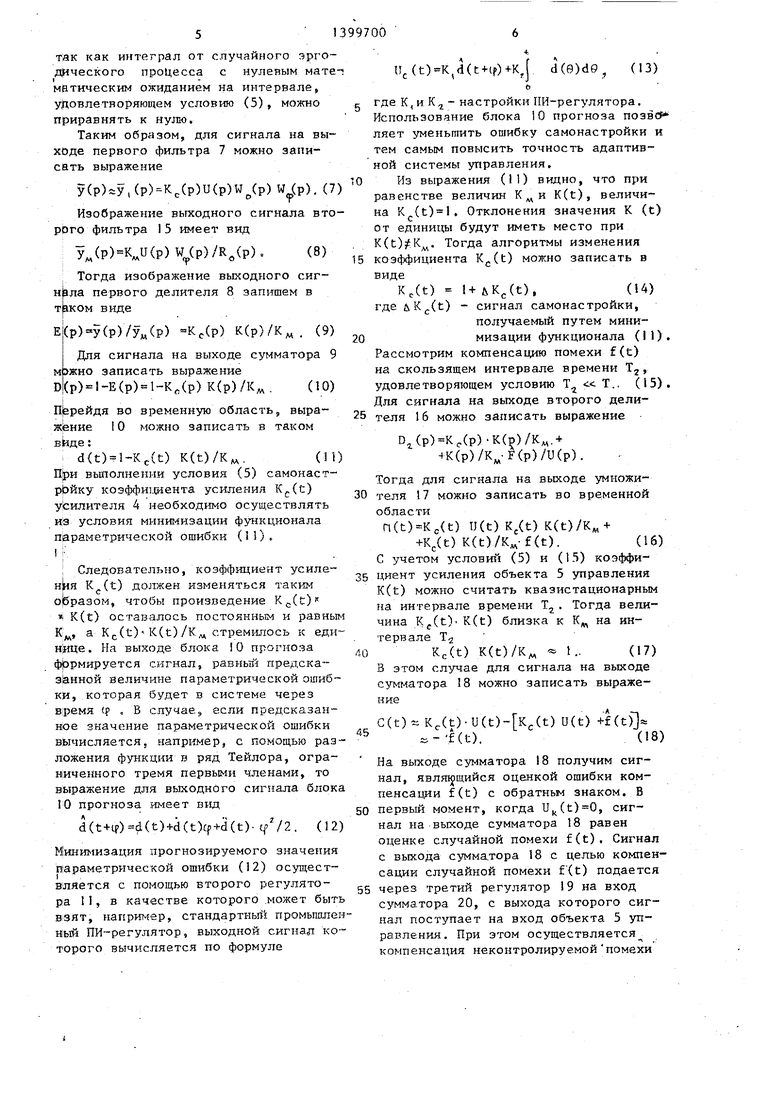
Выходной сигнал усилителя 4 (фиг.2 изменяется по уравнению
Z(t)U(t) (l+uK(t))U(t)-Kjt), где Z(t) - выходной сигнал усилителя 4; переменный коэффициент
усиления;
выходной сигнал блока 12 ограничения.
O
5
0 5 0 5
0
5
Сигнал на выходе фильтров.7 и 15 изменяется следующим образом:
x,j(t)|j (х,(9)-х, (e-T))dO. -t
4 J ,(6)0,
t-T
где X,(9);X2(t) - соответственно входной и выходной сигнал фильтра, усредняющего сигнал на интервале Т.
Адаптивная система управления работает следующим образом.
На вход первого сумматора 2 подается сигнал X ,од задания для системы управления, на другой вход которого подается сигнал y(t) с выхода объекта 5 управления. Выходной сигнал первого сумматора 2 через первый регулятор 3 и усилитель 4 с переменным коэффициентом усиления поступает на первый вход сумматора 20.
Выходной сигнал первого регулятора 3 U(t) поступает также на вход модели 6 объекта, выходной сигнал которой y(t) подается на вход второго фильтра 15 и вход второго делителя 16. Выходной сигнал y(t) объекта 5 управления поступает также на вход первого фильтра 7 и вход второго делителя 16.
Выходной сигнал второго делителя 16, равный отношению сигнала у (t) выхода объекта 5 управления к сигналу y(t) выхода модели 6 объекта,поступает на вход умножителя 17, на другой вход которого поступает сигнал с выхода усилителя 4.
Сигнал с выхода умножителя 17 подается на вход сумматора 18, на другой вход которого поступает сигнал с выхода усилителя 4. На вход третьего регулятора 19 поступает с игнал с выхода сумматора 18. Выходной сигнал сумматора 20 подается на вход объекта 5 управления, на вход которого действует неконтролируемое параметрическое возмущение fgCt) и случайная помеха f(t).
Первый 7 и второй 15 фильтры предназначены для разделения, параметрического возмущения fg(t), являющегося, как правило, низкочастотным, и случайной высокочастотной помехи f(t), представляющей часто эргодический процесс с нулевым математическим ожиданием.
Выходной сигнал первого делителя, равный отношению сглаженного сигнала y(t) к сглаженному сигналу y,(t) и являющийся мерой изменения коэффициента усиления объекта 5 управления в текущий момент времени, подается на вход сумматора 9, на другой вход которого поступает сигнал с выхода формирователя 1 А единичного сигнала, равный по величине такому сигналу на выходе первого 8 делителя, который формируется при равенстве сигналов y(t) и y(t) на входах первого делителя 8.
Выходной сигнал сумматора 9, являющийся относительной ошибкой изменения коэффициента усиления объекта 5 управления, подается на вход блока 10 прогноза, предсказьюающего изменение относительной ошибки коэффициента усиления на некоторое время (р вперед, которое определяется с учетом особенностей динамических характеристик объекта 5 управления. Сигнал с выхода блока 10 прогноза подается на вход второго регулятора J1. Сигнал Ug(t) с вькода второго регулятора 11 поступает на информацион- Р1ЫЙ вход блока 12 ограничения, на первый и второй входы которого подаются с формирователя 13 сигналов уровня ограничения сигналы Ug и U ограничения выходной величины блока 12 соответственно верхней и нижней границ. Выходной сигнал блока 12 ограничения &Kg(t) подается на управляющий вход первого усилителя 4,
Последовательно соединенные второй делитель 6, умножитель 17,. сумма тор 18, третий регулятор 19 и сумматор 20 вместе с подключающими их связями обеспечивают компенсацию случайной помехи f(t), действующей на входе объекта 5 управления, делая тем самым систему управления инвариантной относительно помехи f(t). Введем обозначения Wp(p), W(p). - передаточные функции соответственно объекта 5 уп
равления и модели 6 объекта/ Пусть Wo(p)K(p)/Re(p),
где К(р) - переменный коэффициент
усиления объекта 5 управления;) полином п-го порядка от Р.
Wjp) VRo(p),
где К - коэффициент усиления модели 6 объекта - эталонное значение коэ(})фициента усиления объекта 5 управления.
Выражение для изображения выходного сигнала объекта 5 управления запишется в следующем виде:
у(р) к(р).К(р).и(р) + + K(p)-F(p)/R(p)
(1)
10
0
0
при F(p)F(p)+U|. (р) - ошибка компенсации помехи f(t),
где К(р);U(p);F(p);U(p) - изобра- |с жения в операторной форме соответственно переменного коэффициента усиления усилителя 4, выходного сигнала первого регулятора 3, неконтролируемой помехи f(t), выходного сигнала третьего регулятора 19.
Выражение для выходного сигнала модели 6 объекта имеет вид
y(p)(p)/R,(p)(2).
Для сигнала на выходе первого фильт- 25 ра 7 можно записать выражение
у(р)К(р) и(р) W(p)W(p) + К(р)х
«F(p)W(p)/R(p)«y,(p)+y2(p), где W (р) - передаточная функция первого 7 и второго 15 фильт0
5
ров.
Выражение Wo(p)K(p)/R(p) описывает инерционное звено п-го порядка, которое можно считать фильтром. Поэтому на выходе объекта 5 управления получаем сглаженное значение помехи f(t), тогда можно записать
yJp)W(p)- F(P). (А) Рассмотрим случай, когда изменения коэффициента усиления объекта 5 управления значительно более низко-г частотны по сравнению со случайной помехой f(t),
т.е. Т|
к
где
Тг и Т - времена спадания автокор- . реляционных функций случайной помехи и параметрического возмущения f(tj. Пусть интервал усреднения первого 7 второго 15 фильтров находится в интервале
Tj .: Т « Т, (5) где Т - скользящий интервал усреднения первого 7 и второго 15 фильтров.
0
55
Тогда для составляющей у, (р) на .выходе первого фильтра 7 можно записать
1 f j y(t)- J f(0)de 0
(6)
i-T
так как интеграл от случайного зрго- даческого процесса с нулевым матемвтическим ожиданием на интервале, удовлетворяющем условию (5), можно приравнять к нулю.
Таким образом, для сигнала на выходе первого фильтра 7 можно записать выражение
y(p)y,(p))U(p)W(p) W(p). (7)
Изображение выходного сигнала вто- рОго фильтра 15 имеет вид
y(p)(p)W(p)/R(p). (8)
Тогда изображение выходного сиг- первого делителя 8 запишем в виде
Е|(Р)У(Р)/У„(Р) К,(р) К(р)/К„ . (9)
Для сигнала на выходе сумматора 9 записать выражение D(p) l-E(p) l-K(p)K(p)/K. (10)
П|ерейдя во временную область, выра- 10 можно записать в таком виде:
; d(t) l-Kc(t) K(t)/K. (И) При вьшолиении условия (5) самонаст рЬйку коэффшдиента усиления K(t) усилителя 4 необходимо осуществлять иЭ условия миниг- изации функционала п|араметрической ошибки (П). I |-,
: Следовательно, коэффициент усиления K(t) должен изменяться таким оЬразом, чтобы произведение К,,(с)к « K(t) оставалось постоянным и равныг К, а Кt(t)-K(t)/К, стремилось к еди- . На выходе блока 10 прогноза формируется сигнал, равнь й предсказанной величине параметрической ошибки, которая будет в системе через время (f , В случае, если предсказанное значение параметрической ошибки вычисляется, например, с помощью разложения фун,кдии в ряд Тейлора, ограниченного тремя первьии членами, то выражение для выходного сигнала блока 10 прогноза :имеет вид
d(t+4 )d(t)+d(t)cf+d(t)-t/V.. (12)
М|ингошзация прогнозируемого значения параметрической ошибки (12) осуществляется с помощью второго регулятора II, в качестве которого может быть , наприт-tep, стандартньй промьшшен HibiH пи-регулятор, выходной сигнал которого вычисляется по формуле
и, (t)K,d(t+(f)+K,j d(9)d9, (13)
о
где К, и К - настройки ПИ-регулятора. Использование блока 10 прогноза позвС ляет уменьшить ошибку самонастройки и тем самым повысить точность адаптивной системы управления. Из выражения (11) видно, что при равенстве величин K(t), величина К (t)l. Отклонения значения К (t) от единицы будут иметь место при K(t)itK. Тогда алгоритмы изменения коэффициента Kj,(t) можно записать в виде
K,(t) 1+ ЛКД1),
(54)
где &K.(t) - сигнал самонастройки, получаемый путем минимизации функционала (11).
Рассмотрим компенсацию помехи f(t) на скользящем интервале времени Tj, удовлетворяющем условию Т Т., (15). ля сигнала на выходе второго делителя 16 можно записать выражение
0(р)КДр)-К()/К.+
K(p)/VF(p)/U(p).
Тогда для сигнала на выходе умпожи- теля 17 можно записать во временной области
n(t)Kc(t) U(t)K,(t)K(t) +K(t)K(t)/K„f(t). (16) с учетом условий (5) и (15) коэффи- циент усиления объекта 5 управления K(t) можно считать квазистационарным на интервале времени Т. Тогда величина Kj,(t). K(t) близка к К на интервале Tj
K,(t) K(t)/K, 1.. (17) В этом случае для сигнала на выходе сумматора 18 можно записать выражение
45
C(t)«K(t)-U(t),(t) U(t) +f(t)
- f(t).
(18)
На вьиоде сумматора 18 получим сигнал, явля1 щийся оценкой ошибки компенсации f(t) с обратные знаком. В
первый момент, когда U(t)0, сигнал на выходе сумматора 18 равен оценке случайной помехи f(t). Сигнал с вькода сумматора 18 с целью компенсации случайной помехи f (t) подается
через третий регулятор 19 на вход сумматора 20, с выхода которого сигнал поступает на вход объекта 5 управления. При этом осуществляется компенсация неконтролируемой помехи
f(t) и, тем самым, повышается точность управления в предлагаемой системе управления,
Рассмотрим случай, когда Т т со- поставимо с Т, а также предположим, что случайная помеха f(t) может изменяться скачком в сторону уменьшения или увеличения. В этом случае выражение (6) будет иметь значение, от- 1. личное от нуля, зависящее от величины возмущения f (t) , и становит- - ся невозможным разделить реакцию адаптивной системы управления на случайную помеху и параметрическое возмущение fgCt) .
, В этом случае, система управления будет стремиться компенсировать внешнее возмущение наряду с контуром обратной связи, путем изменения коэффициента самонастройки ), Тогда выходной сигнал второго регулятора
11 U(t) в случае значительной величины случайной помехи f(t) может иметь такое значение, что сигнал самонастройки &Kt«(t) будет uK(t) U(t) -I. При этом коэффициент самонастройки Kg(t) может стать равным нулю или отрицательным, а система управления потерять устойчивость и работоспособность. Поэтому в этих целях в систему управления введен блок 12 ограничения .
Назначение его состоит в том, чтобы ограничить выходной сигнал регулятора 1I значениями нижней и верхней допустимых границ.
Блок 12 ограничения преобразует
щений из условия экстремз а выбранного критерия качества управления. Формула изобретения
г 0
Адаптивная система управления, соде ржашая задатчик входного сигнала, выход которого подключен к суммирующему входу первого сумматора, подключенного выходом к входу первого регулятора, объект управления , выход которого соединен с вы- читающим входом первого сумматора, усилитель, модель объекта, второй ре5 гулятор, первый делитель, второй, третий и четвертый сумматоры,-о т - личающаяся тем, что, с целью повышения точности и устойчивости системы в условиях действия по0 мех значительной интенсивности и изменения параметров объекта зшравле- ния, в нее введены первый и второй фильтры, блок прогноза, блок ограничения, формирователь сигналов уровня
5 ограничения, формирователь единичного сигнала, второй делитель, умно- .житель, третий регулятор, причем выход объекта управления соединен с входом делимого второго делителя и
0 через первый фильтр - с входом делимого первого делителя, вход делителя которого подключен к выходу второго фильтра, вход которого соединен с входом делителя второго делителя и с
5 выходом модели объекта, подключенной входом к выходу первого регулятора и к информационному входу усилителя, выход которого соединен с суммирующим входом третьего сумматора, с первым

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для объектов с запаздыванием | 1985 |
|
SU1280568A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
Изобретение относится к автоматике и может найти применение при управлении нестационарными технологическими объектами. Целью изобретения является повышение точности и устойчивости системы в условиях действия помех значительной интенсивности и изменения параметров объекта управления. Система содержит сумматоры 2,9,18,20, регуляторы 3,11,19, усилитель 4, объект 5 управления, делители 8,16, фильтры 7,15, блок 10 прогноза, умножитель 17, блок ограничения 12, задатчик I входного сигнала, формирователь 13 сигналов уровней ограничения, формирователь 14 единичного сигнала и модель 6 объекта. Самонастройка в системе осущест-. вляется путем минимизации прогнозируемой относительной ошибки коэффициента усиления канала управления от эталона, формируемой на выходе блока прогноза 10. Система реализует компенсацию неконтролируемой помехи на входе объекта 5. 4 ил. О) с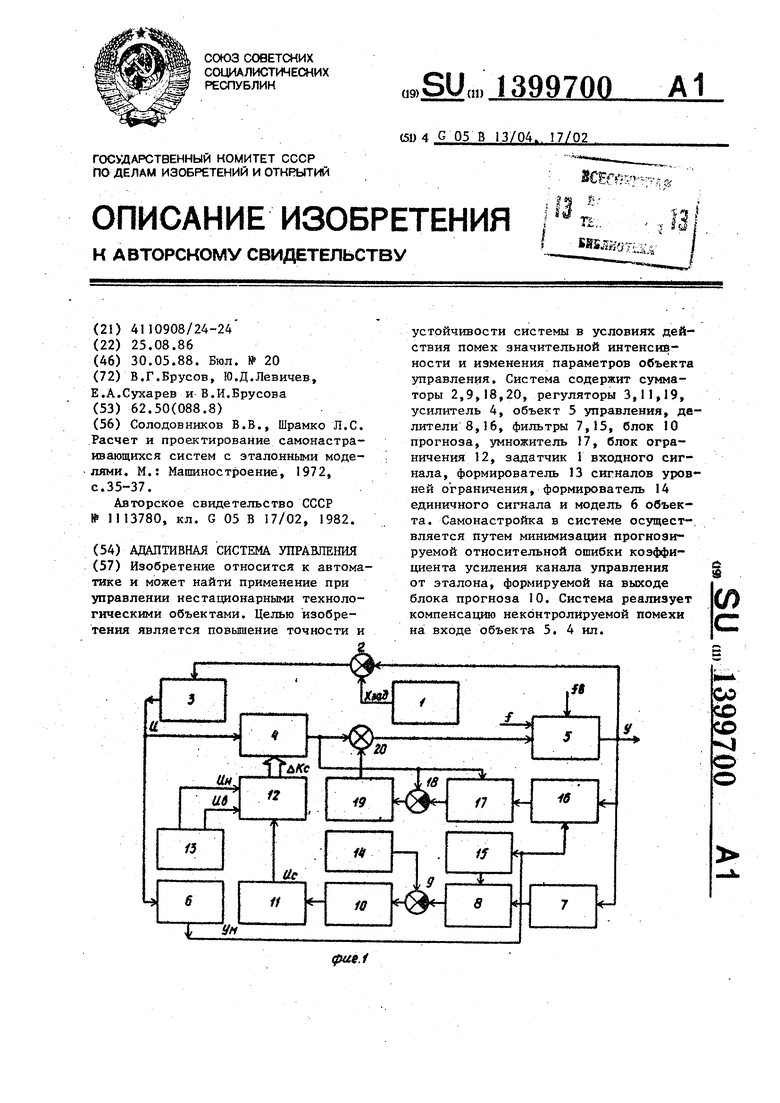
выходной сигнал Ug(t) второго регуля- 40 входом умножителя и с первым входом тора 11 следующим образом:
u(t),npH04,) OB; uK(t) ; Цц, при Uc(t). .и„;
и, npHUjt) и„,
где Цц и Ug - .соответственно значения нижней и верхней границ, причем
Пц 1.
Введение блока 12 ограничения обеспечивает адаптивной системе управления необходимый запас устойчивости при самонастройке.
Величины настроек К, и Kg второго регулятора 11, значения сигналов нижней Uj, и верхней U границ uKe(t), & также величину интервала прогноза f необходимо определять при исследовании и испытании системы управления Лри действии неконтролируемых возмучетвертого сумматора, подключенного выходом к входу объекта управления, а вторьм входом - к выходу третьего
. регулятора, вход которого соединен с
45 выходом третьего сумматора, вычитающий вход которого подключен к выходу .умножителя, подключенного вторым вхо дом к выходу второго делителя, выход первого делителя соединен с вычитаю50 рим входом второго сумматора, подклю ченного СУММИР5ПОЩИМ входом к выходу формирователя единичного сигнала, а выходом через последовательно соединенные блок прогноза и второй регу55 лятор - к информационному входу блок ограничения, первый и второй входы установки уровня ограничения которог соединены соответственно с первым и вторым выходами формирователя сигнавходом умножителя и с первым входом
четвертого сумматора, подключенного выходом к входу объекта управления, а вторьм входом - к выходу третьего
регулятора, вход которого соединен с
выходом третьего сумматора, вычитающий вход которого подключен к выходу умножителя, подключенного вторым входом к выходу второго делителя, выход первого делителя соединен с вычитаюрим входом второго сумматора, подключенного СУММИР5ПОЩИМ входом к выходу формирователя единичного сигнала, а выходом через последовательно соединенные блок прогноза и второй регулятор - к информационному входу блока ограничения, первый и второй входы установки уровня ограничения которого соединены соответственно с первым и вторым выходами формирователя сигнаl/{t)
АКо/Ь) Фив. 2
ditl
27
2i
1
л
dit
| Солодовников В.В., Шрамко Л.С | |||
| Расчет и проектирование самонастраивающихся систем с эталонными моделями | |||
| М.: Машиностроение, 1972, с.35-37 | |||
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
