Изобретение относится к области систем экстремального регулироваиия.
Известные способы управления автоколебательными системами экстремального регулирования, использующие корреляционные методы выделения сигнала, не позволяют существенно повысить номехоустойчивость регулятора, когда сигнал и помеха соизмеримы.
Предложенный способ отличается от известных тем, что выделяют из выходного сигнала с объекта сигнал основной частоты периодической помехи, и в моменты достижения периодической помехой нулевых значений регистрируют выходной сигнал с объекта и преобразуют сигналы этих дискретных выборок в сигнал управления.
Это обеспечивает повышение помехоустойчивости экстремального регулятора при наличии на выходе объекта периодической помехи, частота которой лежит в диапазоне частот сигнала управления и соизмерима с ним по величине.
На фиг. 1 изображена функциональная схема системы, реализующей способ, включающая безынерционный объект регулирования 1, на вход которого подается регулирующее воздействие X, изменяющееся с постоянной скоростью. Экстремальная статическая характеристика объекта выражается зависимостью i(X). На выходе объекта имеется периодическая помеха Y, поэтому выходной сигнал Х объекта состоит из двух составляющих: полезного сигнала / (X) и помехи Y, причем частотный спектр помехи Y находится внутри частотного спектра полезного сигнала f(X).
Импульсный элемент 2 с генератором 3 модулирующих импульсов осуществляет амплитудно-импульсную модуляцию, преобразуя сигнал Xi в последовательность импульсов .- гГенератор 3 может работать в двух режимах: в режиме автогенерации и в режиме синхролизации. В режиме автогенерации он настроен ,на частоту, несколько меньшую, чем основная частота периодической помехи У,
При подаче на вход внешних синхронизирующих импульсов с частотой, большей его собственной частоты, он работает с частотой синхроимпульсов. Блок 4 синхронизации состоит из устройства 5 выделения помехи и генератора 6 синхронизирующих импульсов. Устройство 5 предназначено для выделения основной частоты периодической помехи Y. Сигнал Х на выходе устройства 5 совпадает по фазе с,
сигналом Y и подается на вход генератора 6, где он преобразуется в синхроимпульсы Л4, которые появляются в тот момент, когда фаза сигнала равна О, 2л, 4л, и т. д. или О, п, 2л, 3л и т. д., т. е. в тот момент, когда а:мпл 1туда
пользуются для синхронизации работы генератора 3, экстремальный регулятор 7 вырабатывает сигнал регулирующего воздействия X в зависимости от положения системы относнтельно точки экстремума.
Работа системы, осуществляющей предлагаемый способ, происходит следующим образом.
Сигнал Al с выхода объекта поступает одновременно на один вход элемента 2 и вход блока 4 синхронизации. При отсутствии импульса на втором входе импульсного элем ей га выходной сигнал его равен нулю. В блоке синхронизации из сигнала Ji выделяется основная частота периодической помехи У и формируются синхронизирующие импульсы.
Таким образом, как только фаза сигнала помехи равна О, 2л., 4я, генератор 6 вырабатывает синхронизирующие импульсы, запускающие генератор 3, от которого, в свою очередь, на вход элемента 2 поступают импульсы, отпирающие импульсный элемент. Импульсный элемент 2 отпирается в тот момент, когда фаза помехи равна О, 2л, 4л, т. е. тогда, когда амплитуда помехи равна нулю, поэтому на входе элемента 2 в этот момент имеется только полезный сигнал, не содержащий помехи. Следовательно, на выходе элемента 2 появляются импульсы, амплитуда которых пропорциональна только полезному сигналу.
При отсутствии помехи частота последовательности импульсов KZ определяется собственной частотой генератора 5.
Амплитудно-модулированный полезный сигнал Х поступает на вход экстремального регулятора 7, который вырабатывает регулирующее воздействие по какому-либо закону (запоминание экстремума, определение производной в конечных разностях и т. д.).
На фиг. 2 приведены эпюры сигналов
AIХц.
Предмет изобретения
Способ управления автоколебательной системой экстремального регулирования, отличающийся тем, что, с целью повышения помехоустойчивости экстремального регулятора при наличии на выходе объекта периодической помехи, частота которой лежит в диапазоне частот сигнала управления и соизмерима с ним по величине, выделяют из выходного сигнала с объекта сигнал основной частоты периодической помехи, и в моменты достижения периодической помехой нулевых значений регистрируют выходной сигнал с объекта и преобразуют сигналы этих дискретных выборок в сигнал управления.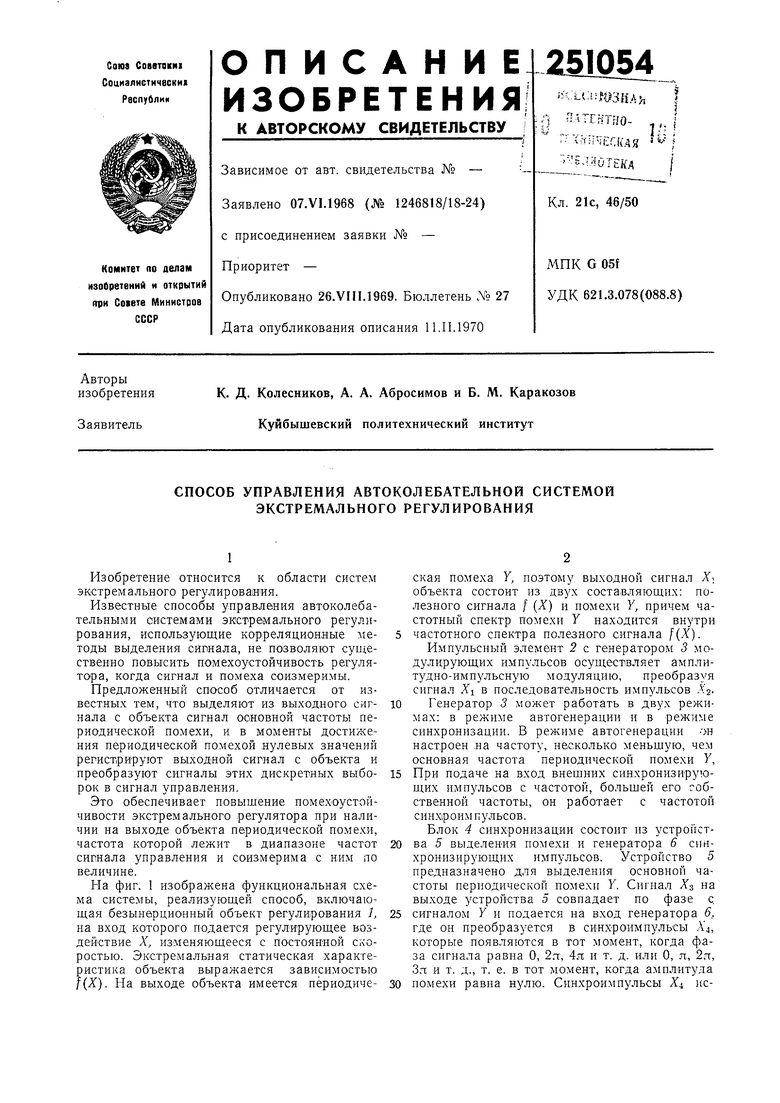
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Система управления | 1984 |
|
SU1242909A1 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2012 |
|
RU2513024C2 |
| Система подчиненного регулирования | 1984 |
|
SU1238024A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2008 |
|
RU2383985C1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Генератор прямоугольных импульсов | 1978 |
|
SU785958A1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2011 |
|
RU2449456C1 |
| Способ измерения параметров комплексного сопротивления электрических двухполюсников | 1990 |
|
SU1758588A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |

ОАДА,-.
I/ I/ J j
и I I I I I n
Фиг. 2
