Известны механизмы блокировки, содержащие маховики ручных перемещений и кулачковую муфту включения механических перемещений.
Предложенный механизм снабжен подвижными в осевом направлении толкателями, расположенными между ступицей маховика и торцом ведомой полумуфты, подпружиненной в направлении ее включения с .приводом механических .перемещений. Это позволяет автоматически отключать маховик ручных пе ремещений лри включенном механическом перемещении.
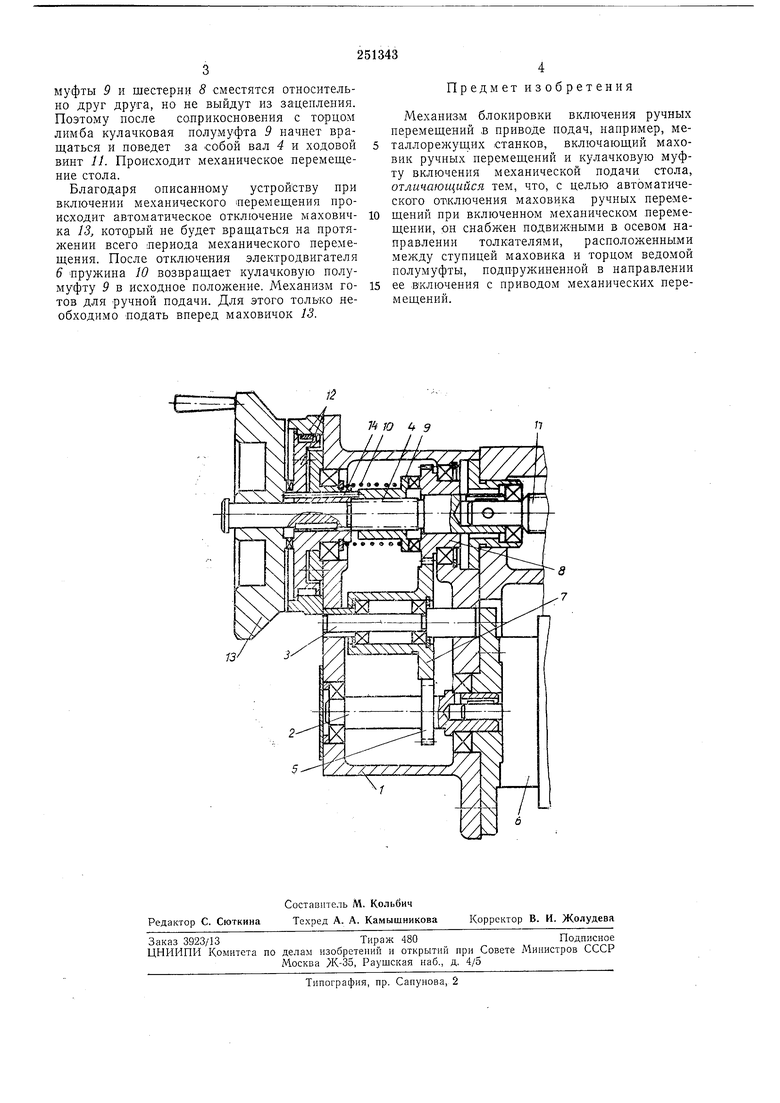
На чертеже изображен описываемый редуктор привода перемещений Стола.
Редуктор привода состоит из корлуса 1, в котором размещены валы 2-4. Вал 2, выполненный заодно с шестерней 5, соединен с валом электродвигателя 6, который закреплен на корлусе редуктора. Шестерня 5 кине.матическая связана через шестерню 7 с шестерней
8,которая .свободно сидит на валу 4 и посредством кулачков соединена с полумуфтой
9,сидящей на ;шлицах этого же вала 4 и поджатой пружиной 10. Вал 4 жестко соединен с ходовым винтом //.
На консольной части вала 4 жестко укреплен лимб 12 отсчета, который при помощи кулачков соединяется с маховичком 13 ручного перемещения стола, свободно насаженным на вал 4. Между .кулачковой лолумуфтой 9 и .маховичком 13 в отверстиях лимба 12 находятся три толкателя 14.
Ручное перемещение стола производится
путем вращения маховичка 13, который через кулачки вращает лимб 12. Последний через шпоночное соединение .передает вращение валу 4, жестко соединенному с ходовым винтом 11. Для осуществления .механического перемещения необходимо кнопкой включить электродвигатель 6, через шестерни 5 и 7 вращающий шестерню 8, которая, поворачиваясь, стремится повернуть полумуфту 9, сидящую на шлицах вала 4.
Кулачковая полуДПфта 9 смонтирована так, что имеет возможность некоторого осевого перемещения но шлицам вала 4. Поэтому в начальный момент она не проворачивается, а только перемещается влево вдоль оси вала
4, преодолевая небольшое сопротивление пружины 10. Это происходит потому, что усилия осевого перемещения кулачковой полумуфты 9 значительно меньше усилия, необходимого для поворота вала 4, ходового винта 11 и поступательного перемещения стола.
Перемещаясь, кулачковая полумуфта 9 через толкатели 14 перемещает и маховичок 13, отключая его от лимба 12. Кулачковая полумуфта 9 продвинется влево до соприкосновемуфты 9 и шестерни 8 сместятся относительно друг друга, но не выйдут из заценления. Поэтому после солрикосновения с торцом лимба кулачковая полумуфта 9 начнет вращаться и поведет за собой вал 4 и ходовой винт 11. Происходит механическое перемещение стола.
Благодаря описанному устройству при включении механического перемещения происходит автоматическое отключение маховичка 13, который не будет вращаться на протяжении всего лериода механического перемещения. После отключения электродвигателя 6 пружина 10 возвращает кулачковую полумуфту 9 в исходное положение. Механизм готов для ручной подачи. Для этого только необходимо подать вперед маховичок 13.
Предмет изобретения
Механизм блокировки включения ручных перемещений в приводе подач, например, металлорежущих .станков, включающий маховик ручных перемещений и кулачковую муфту включения механической подачи стола, отличающийся тем, что, с целью автоматического отключения маховика ручных перемещений при включенном механическом перемещении, он снабжен подвижными в осевом направлении толкателями, расположенными между ступицей маховика и торцом ведомой полумуфты, подпружиненной в направлении ее включения с приводом механических перемещений.