Известен механизм контроля наличия уточной нити в зеве основы ткацкого станка, содержащий щуп, кинематически связанный с рукояткой станка. Этот механизм не может зафиксировать обрыв утка или неправильную его прокладку в зоне щирины ткани, что неблагоприятно отражается на качестве ткани.
В предлагаемом механизме для улучшения качества вырабатываемой ткани щуп выполнен в виде установленных на общей оси нескольких пластинок, расположенных между зубьями берда, а кинематическая связь представляет собой собачку, укрепленную .на рычаге, взаимодействующем с подпружиненным пальцем, установленным на пути его перемещения, и контактирующую с зубом сектора, укрепленного на брусе батана, и пальцем, установленным на оси, несущей подпружиненный ограничитель.
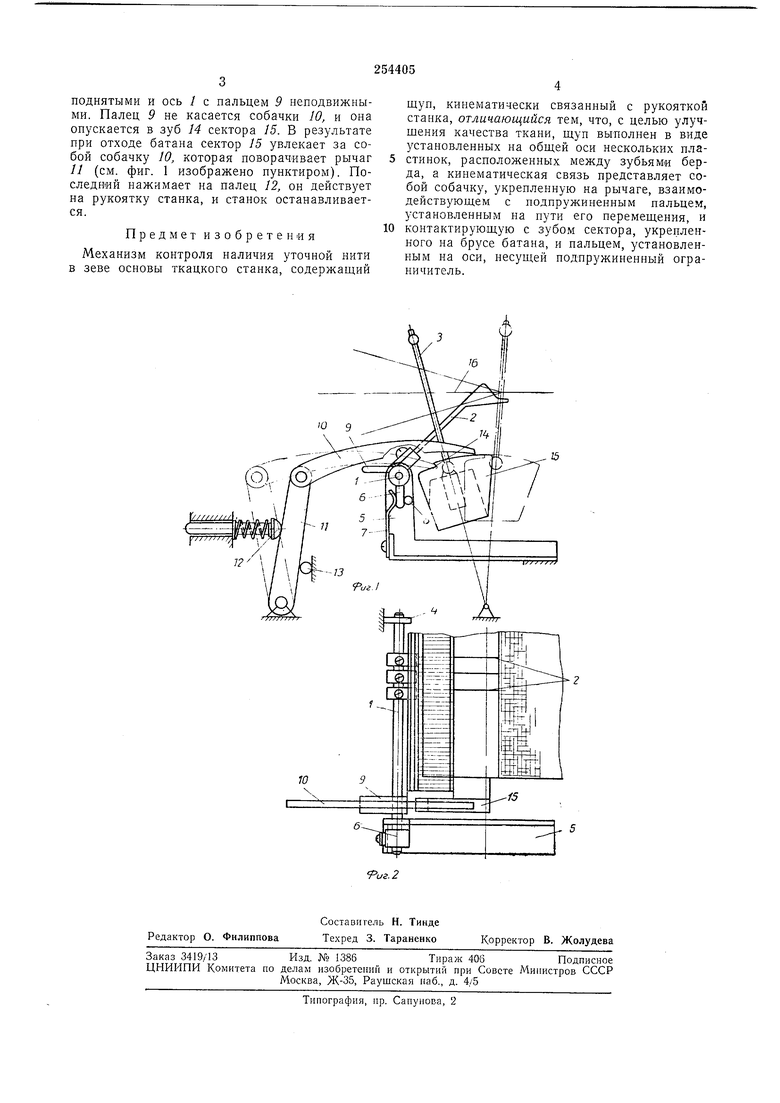
На фиг. 1 изображен предлагаемый механизм контроля уточной нити в зеве основы, вид сбоку; на фиг. 2 - то же, вйд сверху.
Механизм содержит щуп, выполненный в виде установленных на общей оси / нескольких пластинок 2, расположенных между зубьями берда 3. Пластинки 2 имеют толщину 0,2-0,4 МЛ1 в зависимости от номера берда. Каждая пластинка имеет на свободном конце отросток и при работе за счет этого отростка не выходит из зубьев берда. Ось пластинок имеет свободу вращения в неподвижных
подщипниках 4 Е 5 сзади берда 3. На оси J закреплен ограничитель 6 ее движения, находящийся с одной стороны нод воздействием пружины 7, а с другой контактирующий с 5 упором 8, закрепленным на ножке подщипкика 5, и палец 9, над которым раснололсена собачка 10, щарнирно соединенная с поворотным рычагом 11. Последний взаимодействует с установленным на пути его перемещения
0 подпрул-синенным пальцем 12, кинематически связанны.м с рукояткой-отводкой (на чертеже не показана) станка. Движение рычага 11 ограничивает упор /3. Свободный конец собачки 10 контактирует с зубом 14 сектора 15,
5 закрепленного на брусе батана.
Во время рабогы при движении бедра 3 на прибой проложенная уточная ннть 16, проходя над пластинками 2 щупа, отклоняет их
0 вниз и поворачивает при этом ось /, преодолевая сопротивление пружины 7. Одновременно поворачивается и закрепленный на оси / палец 9, который упирается в собачку 10, поддерживая ее в верхнем положении. Вследствие этого собачка не опускается в зуб 14 сектора 15 и при отходе берда и бруса батана назад собачка 10 и связанные с нею рычаг //, палец 12 и отводка станка остаются неподвижными.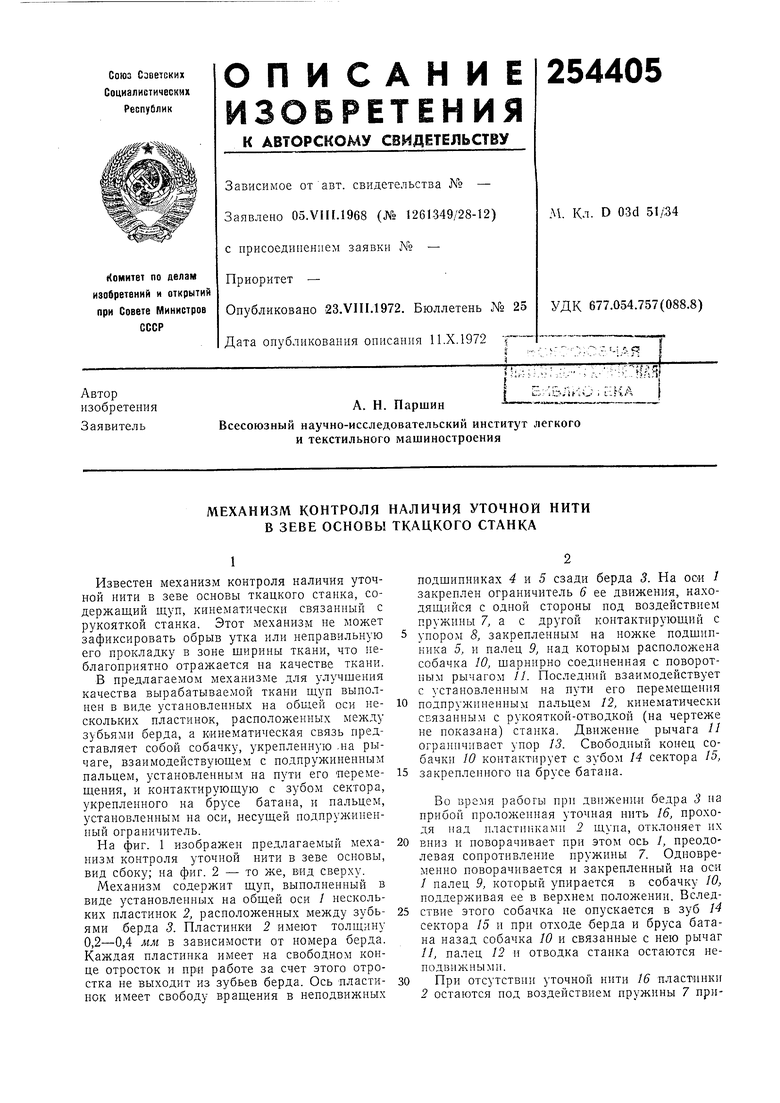
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЙО- ТЕХЙЙЧЕСКАЯБй&лаот?1гдА. Н. ПаршинМЕХАНИЗМ для | 1969 |
|
SU248562A1 |
| МЕХАНИЗМ КОНТРОЛЯ НАЛИЧИЯ УТОЧНОЙ НИТИ В ЗЕВЕ ОСНОВЫ ТКАЦКОГО СТАНКА | 1973 |
|
SU373340A1 |
| МЕХАНИЗМ ПРИБОЯ УТОЧНОЙ НИТИ НА ТКАЦКОМ СТАНКЕ | 1996 |
|
RU2111299C1 |
| Батанный механизм ткацкого станка | 1987 |
|
SU1416550A1 |
| Тканеформирующее устройство ткацкого станка для выработки тканей переменной ширины | 1985 |
|
SU1328411A1 |
| Ткацкий станок | 1979 |
|
SU848493A1 |
| ЭЛЕКТРОМАГНИТНОЕ ПРИСПОСОБЛЕНИЕ К ТКАЦКОМУ СТАНКУ ДЛЯ АВТОМАТИЧЕСКОГО ЕГО ОСТАНОВА ПРИ НЕДОЛЕТЕ ЧЕЛНОКА В ЧЕЛНОЧНУЮ КОРОБКУ | 1932 |
|
SU38501A1 |
| Устройство для прокладывания уточной нити на ткацком станке для выработки тканей переменной ширины | 1982 |
|
SU1074922A1 |
| РУЧНОЙ ТКАЦКИЙ СТАНОК | 1929 |
|
SU17127A1 |
| Ткацкий станок | 1936 |
|
SU53946A1 |
