Изобретение относится к устройствам, с помощью которых определяют место расположения датчиков отведения сигналов, в частности при миотоническом управлении механизмами и устройствами.
Известные устройства для определения места расположения датчиков отведения сигнала при миотоническом управлении механизмами и устройствами содержат источник сжатого газа, редуктор, клапаны, датчик давления, регистрирующие приборы и усилители.
Предлагаемое устройство отличается от известных тем, что в нем установлены датчик перемещения, соединенный с клапаном, например, золотникового типа, через стабилизирующую емкость, и индикатор с фоторегистратором, снабженные усилителем и исполнительным органом, охваченные цепью обратной СВЯЗИ и управляемые с помощью программного устройства, также включенного в эту цепь. Такое выполнение устройства обеспечивает независимость усилия от положения измерительного усилия при его постоянном воздействии на участок сегмента тела.
Для получения нагрузочных характеристик при расслаблении и фантомном напряжении мышц в .предлагаемом устройстве установлена эталонная гильза, например, плеча, в которой выбраны отверстия, образующие координатную сетку.
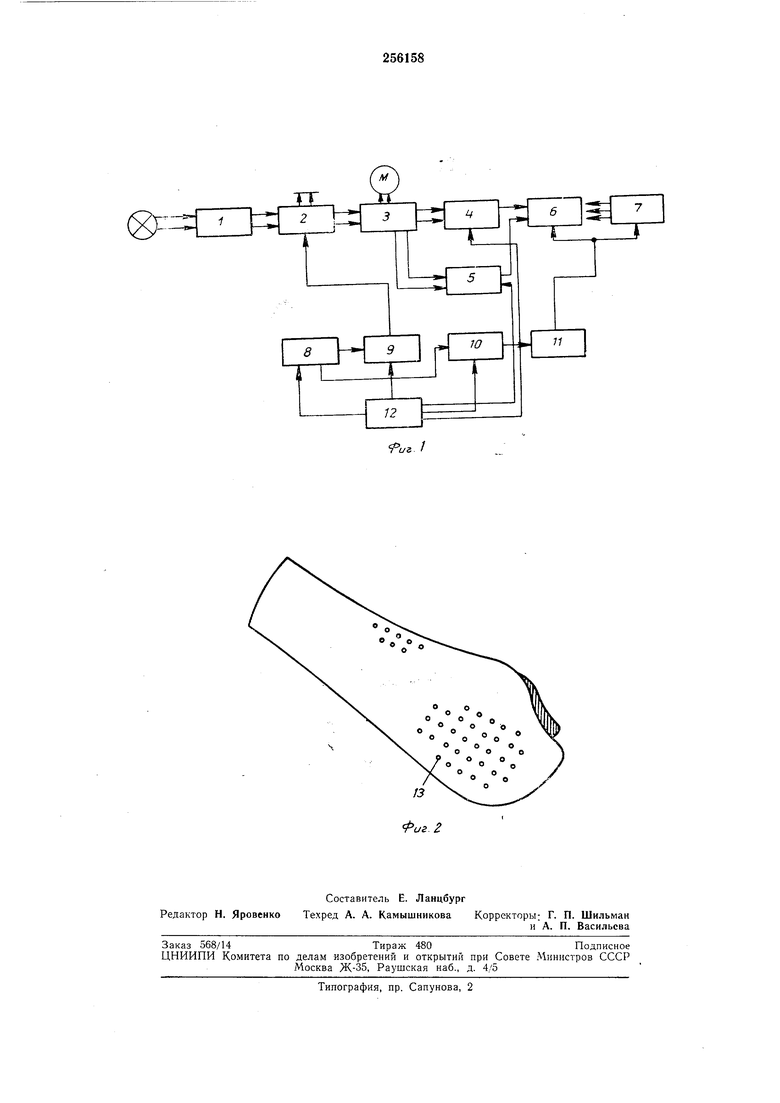
На фиг. 1 изобрал ена блок-схема .предлагаемого устройства; на фиг. 2 - эталонная гильза с координатными отверстиями.
Устройство содержит редуктор 1, к которому но трубопроводу поступает сжатый газ, с заданным давлением воздействующий на управляемый золотниковый клапан 2. Последний поддерживает заданный закон изменения давления в стабилизирующей емкости 3, а следовательно, и в системе датчиков 4 пере.мещения и датчиков 5 давления.
Так как объем стабилнзирующей емкости 3 значительно больше рабочего объема датчика 4 перемещения, то изменение последнего из-за рабочего перемещения штока практически не вносит изменения в давление штока на поверхность культи.
Таким образом, получается практически независимое от пололуения штока усилие, прикладь1ваемое к мышце.
Электрические сигналы от датчиков давления и перемещения подаются на вход индикаторного устройства 6, с экрана которого фиксируется результат на фотопленку при помощи фоторегистрирующего устройства 7.
Клапан 2 управляется по программе, обеспечиваемой программным устройством 8, команды от которого поступают через усилитель 9 на исполнительный механизм клапана.
Индикаторное 6 и фоторегистрирующее 7 устройства управляются командами от программного устройства 8, команды от которого поступают на усилитель 10 и соответствующий исполнительный механизм 11.
Датчики перемещения и давления, програм.мное устройство и усилители получают энергию от специального блока 12 питания.
С помощью предлагаемого устройства снимаются нагрузочные характеристики, которые определяют зависимость положения опорной площадки измерительного элемента от изменения тонуса мыщц при постоянном усилии на опорную площадку.
Если фиксировать положение опорной нлощадки при двух крайних значениях тонуса (расслабленная мыщца и максимально напряженная), то, меняя значение нагрузки на опору от О до максимальной величины, можно получить семейство нагрузочных характеристик в выбранной точке лри различных положениях конечности.
Семейство нагрузочных характеристик дает полное представление о характере и величине помех в выбранной точке.
Эти характеристики получают следующим образом.
Инвалид производит серию характериых движений конечностью, и обследуемая точка поверхности культи циклично нагружается через опорную площадку переменной нагрузкой от О до максимума. При этом фиксируется перемещение опорной площадки в состоянии расслабленной мыщцы, и в состоянии напрялсенной мыщцы (при соверщении инвалидом фантомных движений, например фантомного схвата).
Получают две серии характеристик, одна из .которых соответствует расслабленной мыщце лри различных положениях конечности, а другая - напряженной мыщце нри тех нее положениях конечности.
Соответствующая обработка характеристик позволяет сформулировать обоснованные требования к конструкции миотонического преобразователя.
Для съема нагрузочных характеристик используется эталонная гильза протеза, подогнанная но общепринятому методу (см. фиг. 2). На гильзу наносится координатная сетка с отверстия.ми 13. В эти отверстия проходит
щток датчика перемещения, на конце которого укрепляется съемная опорная площадка. Опорная площадка выбирается из соответствующего набора с различными величинами площадей опорной поверхности.
Предмет изобретения
1.Устройство для определения места расположения датчиков отведения сигнала при
миотоническом управлении механизмами и устройствами, содержащее источник сжатого газа, редуктор, клапаны, датчик давления, регистрирующие приборы и усилители, отличаюшееся тем, что, с целью обеспечения независимости усилия от положения измерительного элемента при его постоянном давлении иа участок сегмента тела, в нем установлены датчик перемещения, соединенный с клапаном, например, золотникового типа, через стабилизирующую емкость, и индикатор с фоторегистратором, снабженные усилителем и исполнительным органом, охваченные цепью обратной связи и управляемые с помощью программного устройства, та.кже включеиного в эту цепь.
2.Устройство по п. 1, отличающееся тем, что, с целью получения нагрузочных характеристик при расслаблении и фантомном напряжении мыщц, в нем установлена эталонная гильза, например, плеча, в которой выбраны отверстия, образующие координатную ceTKv.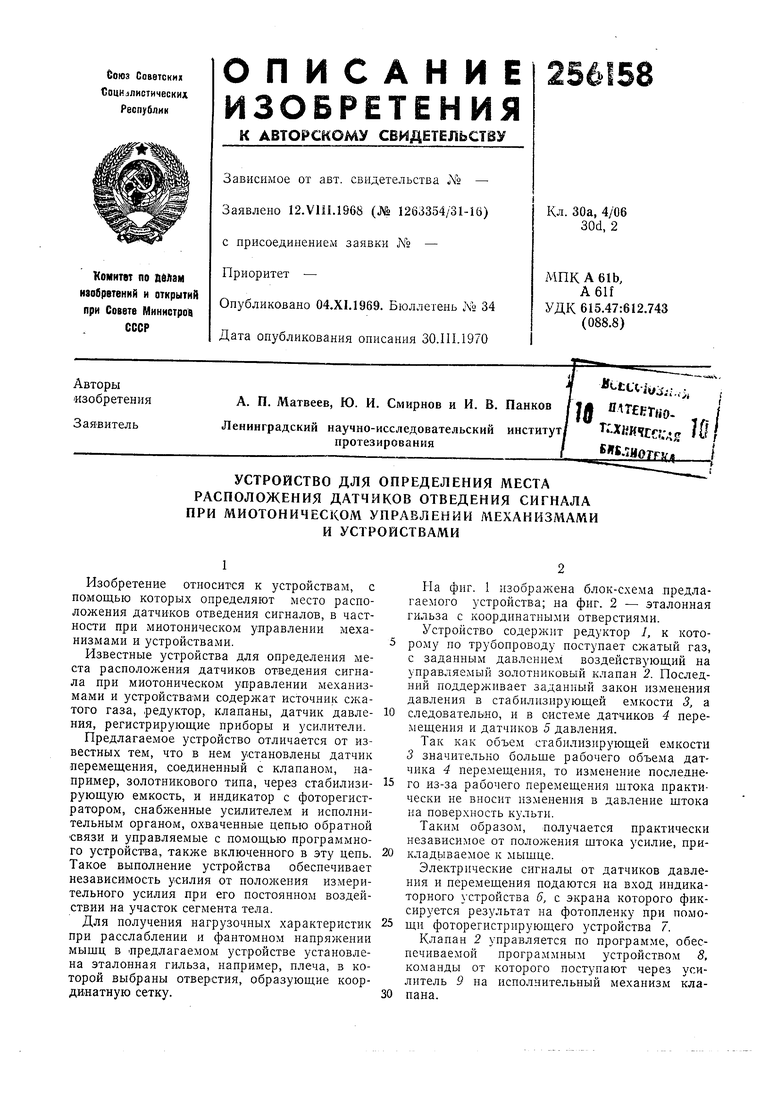
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМ КЛАПАНОМ ПОСРЕДСТВОМ ЦЕПИ УПРАВЛЕНИЯ, А ТАКЖЕ ДЛЯ ВЫЯВЛЕНИЯ НЕИСПРАВНОСТЕЙ В ЭТОЙ ЦЕПИ | 2005 |
|
RU2378678C2 |
| Устройство для проведения испытаний средств транспортной иммобилизации | 1985 |
|
SU1360725A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И/ИЛИ ДЕФОРМАЦИЙ ОБРАЗЦА ПРИ ВЫСОКОТЕМПЕРАТУРНОМ ВОЗДЕЙСТВИИ НА НЕГО И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2665323C1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 1969 |
|
SU251139A1 |
| Установка для контроля адгезионной прочности локальных пленочных площадок с подложкой | 1988 |
|
SU1525555A1 |
| Устройство для шлифования цилиндрических,конических и профильных поверхностей | 1974 |
|
SU523792A1 |
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU598780A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2211962C2 |
| ВИНТОВОЙ КОМПРЕССОР | 2009 |
|
RU2446314C2 |