1
Изобретение относится к радиотехническим .методам контроля за движущимися объектами и предназначено преимущественно для речного транспорта, а также может найти применение на автомобильном транспорте и в других случаях, где по известному пути одновременно перемещаются подвижные объекты.
Известно устройство для определения местоположения объекта, движущегося по известному пути. Принцип его работы заключается в том, что на концах контролируемого пути устанавливают передатчики, излучающие радиоимпульсы с различными частотами повторения, в результате чего образуется интерференционное импульсное поле (поле совпадения импульсов), которое циклически перемещается вдоль пути с постоянной скоростью, меньшей скорости распространения самих радиоимпульсов.
На подвижном объекте фиксируется момент прохождения этой зоны через место расположения объекта и посылается сигнал передатчика-ответчика. Этот сигнал принимается в начальном пункте пути, и расстояние от него до объекта определяется умножением интервала времени между моментами прохождения поля через начальный пункт и получения ответного сигнала с объекта на скорость распространения зоны.
Такой способ пригоден для определения местоположения только одного объекта.
Цель изобретения - дифференцированное определение местоположения объектов и повыщение точности работы устройства.
Это достигается тем. что схема совпадения в диспетчерском пункте подключена к блоку измерения, соединенному со вторым приемником, и к счетчику, соединенному через формирователь с передатчиком и блоком регистрации, подключенным к датчику времени и блоку измерения, а схема совнадения, установленная на подвижном объекте, подключена непосредственно и через блок синхронизации к счетчику, соединенному с передатчиком.
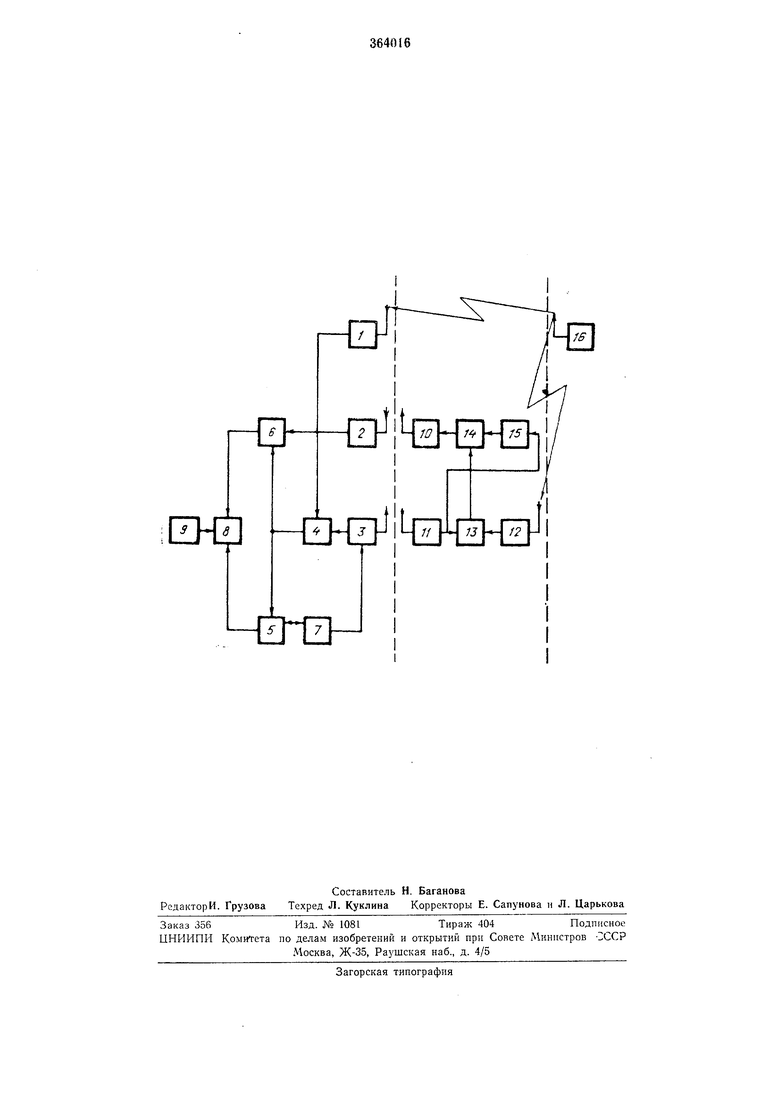
На чертеже показана блок-схема предлагаемого устройства.
Устройство содержит установленные на диспетчерском пункте приемники / и 2, передатчик 3, блок 4 совпадения программирующий счетчик 5 циклов, блок 6 измерения, блок 7 формирования с1И1хроимпульса, блок 8 регистрации, датчик 9 времени, расположенные на подвижном объекте передатчик 10, npiiемники 11 и 12, блок 13, совпадения, ирограммирующий счетчик 14 циклов, блок 15 синхронизации и размещенный на конечном пункте передатчик 16.
Устройство работает следующим образом. Передатчики 3 и 16, работающие на различных волнах и излучающие импульсы с близкой частотой повторения, создают на участке движения объектов зону совпадения этих импульсов, перемещающуюся циклично от диспетчерского пункта к подвижному объекту с 110СТОЯИНОЙ скоростью. Блок 13 совпадения регистрир)ет прохождение зоны через место расположения подвижного объекта в момент одновременного приема импульсов приемником У/ от передатчика 3 и приемником 12 от передатчика 16. Блок 4 совпадения аналогичным образом регистрирует прохождение зоны через диспетчерский пункт за счет одновременного поступления сигналов от собственного передатчика 3 и приемника /, принимающего сигнал передатчика 16.
Рассмотрим работу схемы с момента, когда программирующие счетчики 14 на всех движущихся объектах и программирующий счетчик 5 в диспетчерском пункте находятся в исходном нулевом положении. В момент прохождения зоны через этот пункт срабатывает блок 4 совпадения и посылает в программирующий счетчик 5 циклов первый импульс. Одновременно этим же импульсом запускается блок 6 измереиия, который находится в режиме измерения интервала времени до момента получения ответного снгнала с объекта. По мере продвижения зоны счетчик 5, а затем и все счетчики 14 объектов устанавливаются в первое поло/кение. Однако только у первого подвижного объекта установка программирующего счетчика 14 соответствует первому положению, в котором он выдает сигнал на включение передатчика 10. Если первого объекта на контролируемом участке нет, то в течение первого цикла ответный сигнал с объекта не поступает.
Второй цикл начинается с возникновением второй зоны в диспетчерском пункте. В этот момент блок 4 выдает второй импульс, которым блок 6 переключается в исходное состояние нового измерения времени, а программирующий счетчик 5 устанавливается во второе положение. Также во второе положение переходят по мере продвижеиия зоны и все счётчики подвижных объектов, у второго объекта установка счетчика равна двум, поэтому сигпал поступает на включение передатчика 10. Сигпал этого передатчика иринимается приемником 2 и подается в блок 6, который измеряет расстояние до второго подвижного объекта и
выдает данные в б,ток 8 регистрации времени и места нахождения подвижного объекта. В этот же блок поступает информация от датчика 9 времени и номер опращиваемого объекта
из счетчика 5.
В течение следующего цикла определяется местоположение третьего подвижного объекта. Число таких циклов равно количеству контролируемых подвижных объектов. По окончании
последнего из этого числа циклов заканчивается первая серия местоопределения, после которой следует вторая и т. д. В конце каждой серии программирующий счетчик 5 выдает импульс в блок 7 формирования син.хронизирующего импульса, излучаемого передатчиком 3. Этот импульс может отличаться от импульсов, образующих зону, либо частотой, либо большей длительностью. На всех подвижных объектах этот импульс выделяется блоком 15 сипхронизации, одной из возможных реализаций которого может быть интегрирующая схема. Из блока 15 синхронизирующий импульс поступает на программирующие счетчики 14 и переводит их в исходное нулевое положение.
Программирующий счетчик 5 в диспетчерском пункте переводится в исходное положенне непосредственно импульсом блока 7.
Предмет изобретения
Устройство для определепия местоположения объектов, содержащее установленные на диспетчерском пункте первый приемник и передатчик, подключенные к схеме совпадения;
счетчик, второй приемник, блок измерения, формирователь импульсов, блок регистрации и датчик времени; передатчик, установлеппый на конечном нункте, и расположенные на подвижном объекте прие.мники, соединенные со
схемой совпадения, передатчик, счетчик и 6viOK синхронизации, отличающееся тем, что, с целью повыщен11Я точиости работы устройства, на дисиетчерском пуикте схема совпадения подключена к блоку измерения, соединенному
со вторым премником, и к счетчику, соединенному через формирователь импульсов с передатчиком и блоком регистрации, подключенным к датчнку времени и блоку измерения, а на подвижном объекте схема совпадения подключена непосредственно и через блок синхронизации к счетчику, соединенному с передатчиком.
Н
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА, ДВИЖУЩЕГОСЯ ПО ИЗВЕСТНОМУ ПУТИ | 1970 |
|
SU260209A1 |
| Система сбора информации для рассредоточенных объектов | 1974 |
|
SU532116A1 |
| Устройство для регистрации местоположения подвижного объекта | 1984 |
|
SU1180943A1 |
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2487418C1 |
| Устройство для сбора информации с рассредоточенных объектов | 1980 |
|
SU942110A2 |
| Комплексная система телемеханики на бесконтактных элементах | 1960 |
|
SU144209A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2263401C2 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОППЛЕРОВСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2007 |
|
RU2328416C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |