1
Изобретение относится к области систем автоматического регулирования и может быть использовано для увеличения точности работы и упрощения бесконтактных следящих систем постоянного тока.
Известны бесконтактные следящие приводы постоянного тока, содержащие .измеритель угла рассогласования, входы которого связаны со входным и выходным валами привода, а выход через последовательно соединенные усилитель, мостовой выпрямитель, сумматор
и ШИрОТНО-ИМПуЛЬСНЫЙ модулятор ПОДКЛЮЧЕН
к первому входу бесконтактного двигателя постоянного тока, реле реверса, вход которого подсоединен к выходу усилителя, а выход- ко второму входу бесконтактного двигателя постоянного тока, синхронный тахогенератор на входном валу привода и трехфазный выпрямитель. При этом вход трехфазного выпрямителя связан с выходом синхронного тахогенератора, а вал бесконтактного двигателя через редуктор - с выходным валом иривода.
Предлагаемое устройство отличается от известного тем, что выход трехфазного вьшрямителя подключен -ко входу сумматора.
Это позволяет применить более простые нереверсивные синхронные тахогенераторы, обычные выпрямители и тем самым упростить следящий привод.
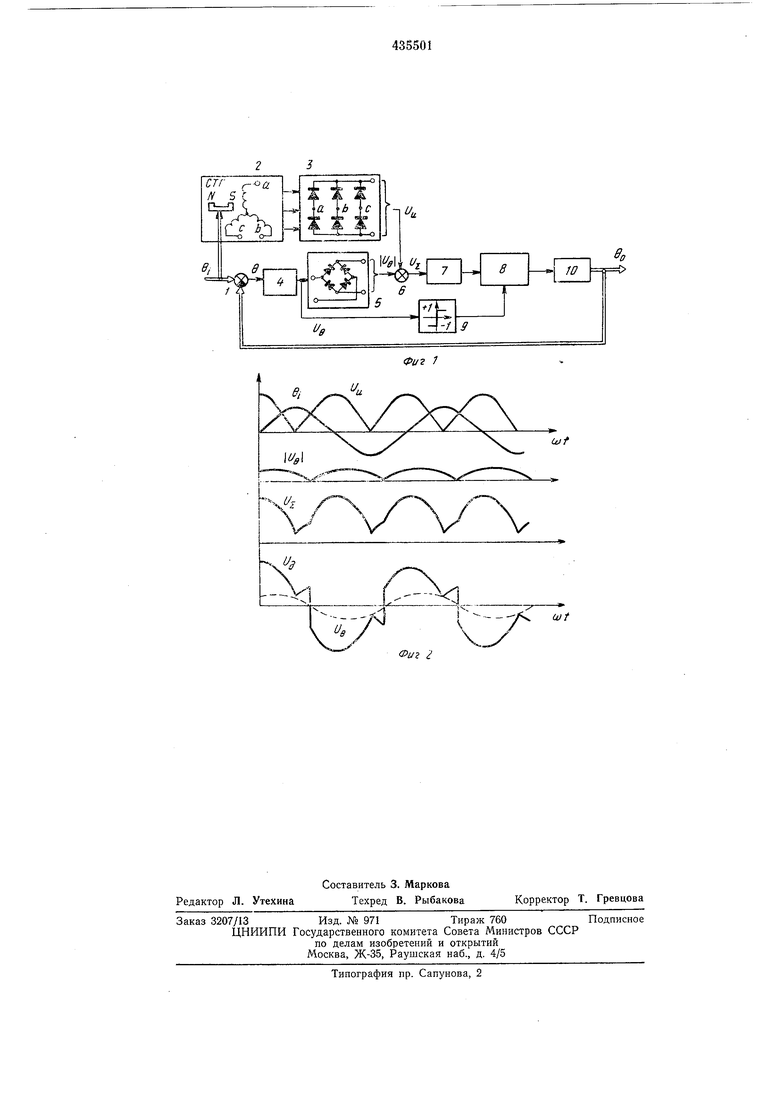
На фиг. 1 дана блок-схема бесконтактного следящего привода; на флг. 2--диаграмма его работы.
Привод содержит измеритель угла рассогласования 1, синхронный тахогенератор СТГ 2, трехфазный выпрямитель 3, усилитель 4, мостовой выпрямитель 5, сумматор 6, широтно-импульсный модулятор 7, бесконтактный двигатель постоянного тока 8, реле реверса 9 и редуктор 10.
На чертеже и в тексте приняты обозначения:
6г, Во, 9 - входная, выходная величины и ошибка привода; и в - сигнал ошибки привода; UK - напряжение на выходе трехфазного выпрямителя; Us Ue - выходное напряжение сумматора 6.
Бесконтактный следящий привод работает следующим образом.
Входной угол сравнивается с выходным углом измерителя рассогласования 1, скорость вращения входной оси измеряется синхронным тахогенератором 2, выход которого соединен со входом выпрямителя 3. Сигнал рассогласования усиливается и преобразуется (в случае необходимости) в постоянное напряжение рассогласования Ue с помощью усилителя 4, выход которого соединен со входом выпрямителя 5. На входы сумматора 6 подключены выходные напряжения выпрямителей 3 и 5, а его вход соединен с входом модулятора 7.
Модулятор 7 преобразует напряжение сумматора в иоследовательность импульсов, относительная длительность которых пропорциональна напряжению i/E. Эти импульсы управляют скоростью вращения двигателя 8. Направление вращения, т. е. знак вращающего момента двигателя 8 определяется состоянием реле реверса 9.
Выходной вал двигателя через редуктор 10 соединен с нагрузкой и .измерителем рассогласования 1. Коэффициент передачи СТГ 2 выбран с таким расчетом, что при постоянной скорости вращения входного вала напряжение f/и на выходе выпрямителя 3 оказывается достаточным для того, чтобы двигатель развивал вращающий момент, равный моменту нагрузки.
Таким образом, при линейной заводке система в установивщемся режиме не имеет ощибки, т. е. полностью инвариантна.
В режиме синусоидальной заводки январиантный Вход также способствует увеличению точности системы, что поясняется с помощью диаграмм на фиг. 2. Напряжение t/и на выходе выпрямителя 3 пропорционально модулю скорости входного вала, т. е. модулю производной от входного угла 9,-. Это напряжение складывается с модулем напряжения рассогласования | f/e | в сумматоре. Напряжение Ug на двигателе пропорционально Un и противоположно по знаку последнему на интервалах времени, когда напряжение рассогласования отрицательно благодаря .работе реле реверса 9.
Предмет изобретения
Бесконтактный следящий привод постоянного тока с комбинированным управлением, содержащий измеритель угла рассогласования, входы которого связаны с входным и выходным валами привода, а выход через последовательно соединенные усилитель, мостовой выпрямитель, сумматор и широтно-импульсный модулятор подключен к первому входу бесконтактного двигателя постоянного тока, реле реверса, вход которого подсоединен к выходу усилителя, а выход - ко второму входу бесконтактного двигателя постоянного тока, синхронный тахогенератор на входном валу привода и трехфазный выпрямитель, при этом вход трехфазного выпрямителя связан с выходом синхронного тахогенератора, а вал бесконтактного двигателя постоянного тока через редуктор - с выходным валом привода, отличающийся тем, что, с целью упрощения следящего привода, выход трехфазного выпрямителя подключен ко входу сумматора.
вп
Wt
Фиг 

| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Бесконтактная следящая система постоянного тока | 1972 |
|
SU483650A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |