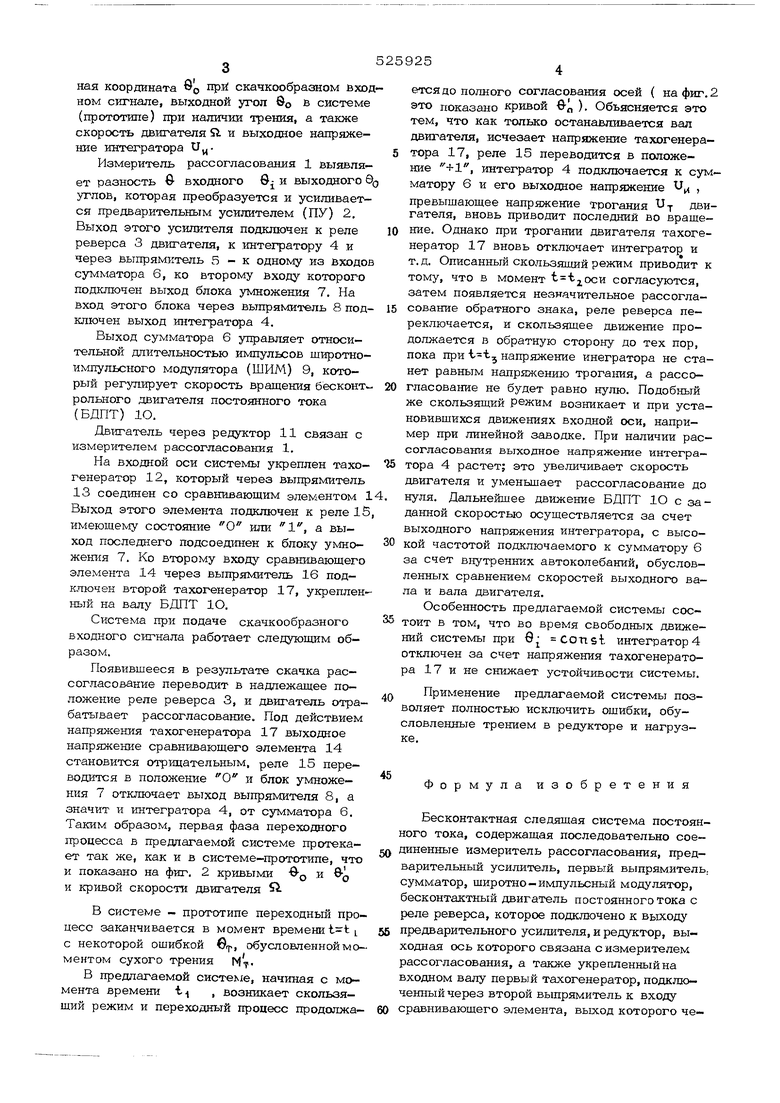
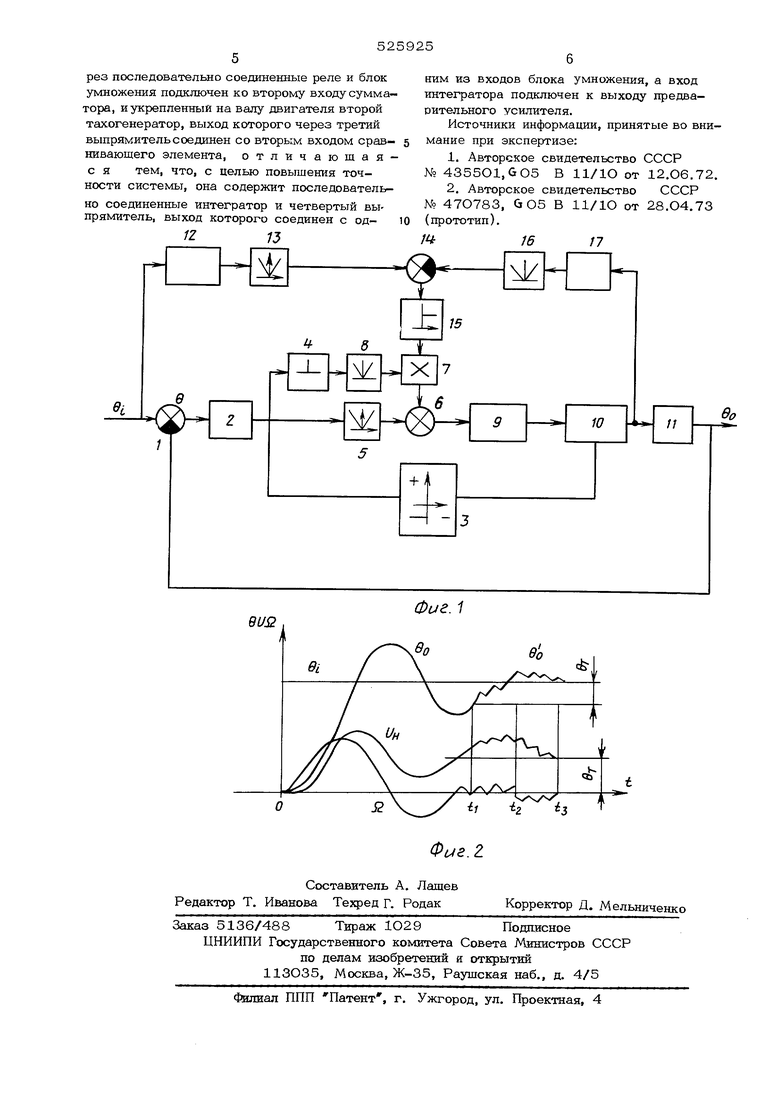
ная координата QO скачкообразном вход ном сигнале, выходной угол во в системе (прототипе) при наличии трения, а также скорость дв,игателя SI и выходное напряжение интегратора Измеритель рассогласования 1 выявляет разность € входного 0 и выходного Э углов, которая преобразуется и усиливается предварительным усилителем (ПУ) 2. Выход этого усилителя подключен к реле реверса 3 двигателя, к интегратору 4 и через выпрямитель 5 - к одному из входов сумматора 6, ко второму входу которого подключен выход блока умножения 7. На вход этого блока через выпрямитель 8 подключен выход интегратора 4. Выход сумматора 6 управляет относительной длительностью импульсов широтноимпульсного модулятора (ШИМ) 9, который регулирует скорость вращения бесконт 20 рольного двигателя постоянного тока (БДПТ) 1О. Двигатель через редуктор 11 связан с измерителем рассогласования 1. На входной оси системы укреплен тахо- и генератор 12, который через выпрямитель 13 соединен со сравнивающим элементом 14. Выход этого элемента подключен к реле 15,
имеющему состояние О или 1, а выход последнего подсоединен к блоку умножения 7. Ко второму входу сравнивающего элемента 14 через выпрямитель 16 подключен второй тахогенератор 17, укрепленный на валу БДПТ Ю.
Система при подаче скачкообразного входного сигнала работает следующим образом.
Появившееся в результате скачка рассогласование переводит в надлежащее положение реле реверса 3, и двигатель отрабатывает рассогласование. Под действием напряжения тахогенератора 17 выходное напряжение сравнивающего элемента 14 становится отрицательным, реле 15 переводится в положение О и блок умножения 7 отключает выход выпрямителя 8, а значит и интегратора 4, от сумматора 6. Таким образом, первая фаза переходного процесса в предлагаемой системе протекает так же, как и в системе-прототипе, что
&:,
и показано на фиг. 2 кривыми V-Q
и и кривой скорости двигателя 5i
в системе - прототипе переходный пропесо заканчивается в момент времени с некоторой ошибкой Q, обусловленной моментом сухого трения NTВ предлагаемой системе, начиная с момента времени t , возникает скользящий режим и переходный процесс продолжавыходного напряжения интегратора, с высокой частотой подключаемого к сумматору 6 за счет внутренних автоколебаний, обусловленных сравнением скоростей выходного вала и вала двигателя.
Особенность предлагаемой системы состоит в том, что во время свободных движений системы при в const интегратор4 отключен за счет напряжения тахогенератора 17 и не снижает устойчивости системы.
Применение предлагаемой системы позволяет полностью исключить ощибки, обусловленные трением в редукторе и нагрузке.
ула изобретения
Ф о
м
Бесконтактная следящая система постоянного тока, содержащая последовательно сое-
5Q диненные измеритель рассогласования, предварительный усилитель, первый выпрямитель, сумматор, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока с реле реверса, которое подключено к выходу
56 предварительного усилителя, и редуктор, выходная ось которого связана с измерителем рассогласования, а также укрепленный на входном валу первый тахогенератор, подключенный через второй выпрямитель к входу
60 сравнивающего элемента, выход которого чеется до полного согласования осей ( на фиг. 2 это показано кривой б-д ). Объясняется это тем, что как только останавливается вал двигателя, исчезает напряжение тахогенера- тора 17, реле 15 переводится в положение -Ы, интегратор 4 подключается к сумматору 6 и его выходное напряжение , превышающее напряжение тоогания UT двигателя, вновь приводит последний во врашение. Однако при трогании двигателя тахогенератор 17 вновь отключает интегратор и т.д. Описанный скольз5шшй режим приводит к тому, что в момент согласуются, затем появляется незначительное рассогласование обратного знака, реле реверса переключается, и скользящее движение продолжается в обратную сторону до тех пор, пока при напряжение инегратора не станет равным напряжению трогания, а рассогласование не будет равно нулю. Подобный же скользящий режим возникает и при установивщихся движениях входной оси, например при линейной заводке. При наличии рассогласования выходное напряжение интегратора 4 растет; это увеличивает скорость двигателя и уменьщает рассогласование до нуля. Дальнейшее движение БДПТ 1О с заданной скоростью осуществляется за счет
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1976 |
|
SU641399A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1984 |
|
SU1241187A1 |
