il
Изобретение относится к электромеханическим следяндим системам, нредназиачено для слежения за изменением входного сигнала и может быть иснользовано в счетно-решающих устройствах, системах автоматического регулирования и управления.
Известны широко применяемые в автоматике следяш.ие системы, содержащие усилитель, двигатель, тахогенератор, редуктор, нагрузку и датчик угла.
Качество работы следящей системы характеризуется, в частности, ее статической ошибкой. Одной из составляющих статической ошибки следящей системы является дрейф нуля, обусловленный нестабильностью элементов, узлов и -блоков, входящих в состав следящей системы.
Большинство из известных вариантов схемных решений позволяет компенсировать дрейф одного или нескольких звеньев следящей системы (дрейф одного каскада усилителя или всего усилителя, дрейф тахогенератора и т. д.), что привадит к частичной компенсации дрейфа нуля следящей системы.
Цель изобретения - более полная компенсация дрейфа нуля, что дает возможность повысить точность следящей системы.
Это достигается тем, что следящая система дополнительно содержит датчик угла, подключенный ко входу усилителя, перекидную электромагнитную муфту, соединяющую ось нагрузки либо с основным датчиком угла, либо с дополнительным, и коммутатор, нормально замкнутый контакт которого включен в цепь,
соединяющую точку суммирования входного сигнала и сигнала обратной связи осповного датчика угла со входом усилителя, а нормально разомкнутый контакт - в цепь питания обмотки электромагнитной муфты.
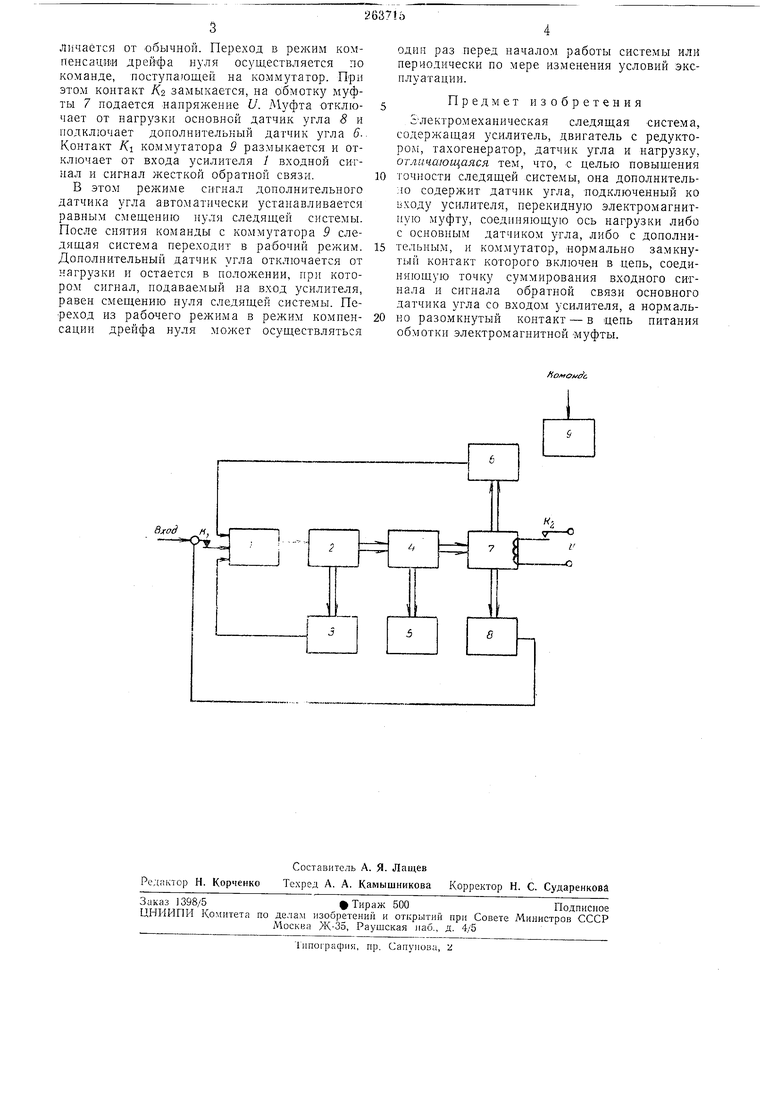
На чертеже дана схема следящей системы. Она включает усилитель 1, двигатель 2, тахогенератор 3, редуктор 4, нагрузку 5, дополнительный датчик угла 6, электромагнитную перекидную муфту 7, основной датчик угла 8
и коммутатор 9.
Устройство работает следующим образом. Сигнал ошибки следящей системы иоступает на вход усилителя / через нормально замкнутый контакт KI коммутатора 9. Двигатель 2
через редуктор 4 разворачивает ось нагрузки 5 (объект регулирования). Тахогенератор 3 служит для выработки сигнала отрицательной обратной связи по скорости. В рабочем режиме контакт К коммутатора 9 разомкнут,
и перекидная электромагнитная муфта 7 связывает ось нагрузки с осью основного датчика угла 8, предназначенного для выработки сигнала жесткой обратной связи. Таким образом, в рабочем режиме работа
лнчаётся от обычной. Переход в режим компенсации дрейфа нуля осуществляется по команде, поступающей на коммутатор. П-рн этом контакт /Cz замыкается, на обмотку муфты 7 подается напряжение U. Муфта отключает от нагрузки основной датчик угла 8 и подключает дополнительный датчик угла 6.. Контакт /Ci коммутатора 9 размыкается и отключает от входа усилителя 1 входной сигнал и сигнал жесткой обратной связи.
В этом режиме сигнал дополнительного датчика угла автоматически устанавливается равным смещению нуля следящей системы. После снятия команды с коммутатора 9 следящая система переходит в рабочий режим. Дополнительный датчик угла отключается от нагрузки и остается в положении, при котором сигнал, подаваемый на вход усилителя, равен смещению нуля следящей системы. Переход из рабочего режима в режим компенсации дрейфа нуля может осуществляться
один раз перед началом работы системы или периодически по мере изменения условий эксплуатации.
Предмет изобретения
S-лектромеханическая следящая система, содержащая усилитель, двигатель с редуктором, тахогенератор, датчик угла и нагрузку, отличающаяся тем, что, с целью повыщения
точности следящей системы, она дополнительно содержит датчик угла, подключенный ко входу усилителя, перекидную электромагнитиую муфту, соединяющую ось нагрузки либо с основным датчиком угла, либо с дополнительиым, и колшутатор, нормально замкнутый контакт которого включен в цепь, соединяющую точку суммирования входного сигнала и сигнала обратной связи основного датчика угла со входом усилителя, а нормально разомкнутый контакт - в цепь питания обмотки электромагнитной -муфты.