Изобретение относится к области судостроения.
Известны устройства для снуска Н подъема катеров в открытом море, включающие в себя лебедку с грузовым и следящим нриводами и тросовую Проводку € подвеской, электросистему управления приводами лебедки.
Недостатком их является то, что выбор момента включения грузового привода на подъем зависит от субъективной оценки оператором оптимального положения для подъема, которым является положение у верщины волны. В связи с этим практически неизбежны ошибки В выборе момента начала подъема, что мОЖет привести к неблагоприятному влияяию скорости подъема груза на волне, которая значительно превосходит скорость подъема грузовым приводом и способствует образованию слабины к возникновению динамических рывков в тросах.
Целью изобретения является исключение динамических нагрузок и повышение безопасности при подъеме за счет автоматического выбора момелта начала подъема, соответствующего равенству скоростей подъема грузовым приводом и вертикального перемещения катера у вершииы волны. Это достигается тем, что следящий привод кинематически жестко связан с барабанами лебедки, а грузовой привод соединяется с ними при помощи
сиепной муфты, уиравляемой через блок сравнения напряжений, генерируемого тахогенератором, присоединенным К валу следящего привода, и напряжения на эталонном сопротивлении, равнОго ио велпчине значению напряжения тахогенератора при уравнивании оборотов следящего и грузового приводов лебедки, а по полярности - обратного э. д.с. тахогенератора нри режиме нодъема катера волной. Результирующее напряжение тахогенератора через вентиль питает промежуточное реле, нормально закрытый контакт которого включен в цепь катушки реле времени, а нормально открытые контакты обоих реле включены последовательно в цепь управляюндего электрода безынерционного элемента, например тиратрона, питающего исполнительное реле включения привода замыкания муфты.
Кроме того, для одновременности замыкания муфты лебедок носовой и кормовой подвесок нормально открытые контакты реле времени и промежуточные реле обеих лебедок соединены в последовательную цепь.
Сущность изобретения поясняется чертеЖОЛ.
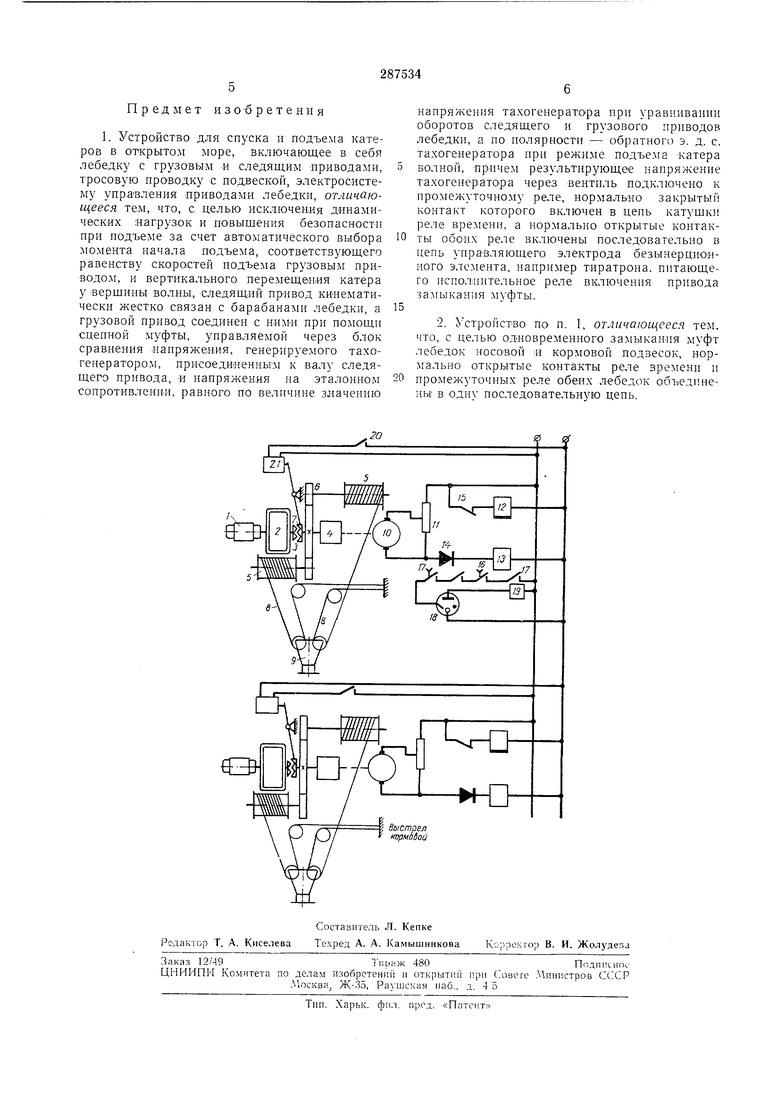
редуктору 2, .на выходном валу которого установлена сцепная муфта 3, и следящей части, состоящей из следящего привода 4, которым может служить гидромютор с гидропневмоаккумулятором, работающИДП- по общеизвестному -принципу в реж1име слежения за перемещениями катера на волнении при качке судна, барабанов 5, дополнительного редуктора 6, кинематически жестко связанных между собой, при этом .выходной вал редуктора оканчивается сцепной подвижной муфтой 7, служащей для соединения с муфтой 3 в момент подъема. На барабанах закрепляются ходовые концы тросов 8, охватывающие щкивы подвесок 9 и .другим1н концам1И крепящиеся к конструкции выстрелов известного подъем.пого устройства. К валу следящего пр|Ивода 4 подсоединяется датчик скорости тахоге«ератора 10, .который подключается в цепь постоянного тока эталонного сонроти-влення // таким образом, чтобы при работе следящего привода 4 в режиме «выбирать полярность на зажимах тахогенератора бьгла обратпа полярности на заж.имах эталонного сопротивления 11. К эталонному сопротивлению по последовательным цепочкам подключены катупгка реле 12 времени, промежуточное реле 13, питающееся через вентиль 14 результирующим напряжением от сравнения напряжений, генерируемого тахогенератором, и этаЛОнного. При этом нормально закрытый контакт 15 промежуточного реле последовательно включен в цепь катушки реле времени. Нормально открытые контакты 16 реле времени и нормально открытые контакты 17 про-, межуточных реле электрических схем носового и кормового следящих приводов 4 через безынериионный элемент, например тиратрон 18, включены в цепь исполнительного реле 19, а нормально открытый контакт 20 исполнительного реле включен в цепь электромагнита 21 привода замыкания муфты. Привод 4 переходит в режим слежения за колеба пиями катера на волнении после присоединения его к подвескам 9 при отключенных муфтах 3 и 7 грузовой и следящей частей устройства.
Устройство работает следующим образом.
Перед подъемом включается электродвигатель -1 грузовой части редуктора 2 для его разгона, после чего подается питание на электрическую схему.
При вертикальны .х перемещениях катера на волне тахогенератор, связанный со следящим приводом 4, вырабатывает э. д. с., величина .которого изменяется от нуля у нодошвы волны до максимума посредине высоты волны и нуля на вершине волны. В связи с этим имеются два положения груза на волне (одно - у подощвы, другое - у вершины), когда скорость движен1ия катера на волне и скорость разогнанной грузовой частп лебедки уравниваются. При этом положение у вершины волны является оптима,1ьным для замыкания 5 и 7 и подъема груза, так как после положения у подошвы волны скорость вертикального иеремещения груза возрастает и приводит к недонустимому явлению образования слабины в тросах.
Выдача импульса на электромагнит 21 привода замыкания муфты ироизеодится следующи-м образом.
При подъеме, катера с подошвы волны э. д. с., вырабатывае: 1ая тахогенератором, возрастает от нуля и в некоторой точке, уравниваегся напряжением эталонного сопротивления //, а так как полярность э. д. с. тахогеператора при подъеме груза на волне обратив полярности на зажимах эталонного сопротивления, результирующее напряжение в цепи равно нулю, что приводит к тому, что нормально закрытый контакт /5 промежуточного реле 13 замыкает цепь реле 12 времени, которое в свою очередь, замыкает нормально открытые контакты 16 в цепи исполнительного реле 19 привода замыкания муфт, однако исполнительное реле не срабатывает, так как размыкается нормально открытый контакт П промежуточноГо реле 13. Вентиль 14 нрепятствует протеканию тока по цепи при дальнейшем перемещении груза на волне, так как тахогене.ратор вырабатывает э. д. с. обратной полярности эталонному напряжению. При снижении скорости перемещения катера у вершины ВОЛНЫ э.д.с, вырабатываемая тахогенератором, уравнивается но Величине с эталонным. Дальнейшее снижение скорости перемешения груза на волие приводит к снижению э. д. с. и срабатыва.нию промежуточного реле 13. При этом нормально открытый контакт в цепи исполнительного реле замыкается, а нормально закрытый контакт /5 в цепи катушки реле времени размыкается. Но так как нормально открытый контакт 16 реле времени размыкается с заданной выдержкой времени, и цепь катушки исполнительного реле через тиратрон 18 замыкается, импульс передается па электр.омагнит 21 привода замыкания муфты 7.
В связи с этим замыкание муфт 3 и 7 проНЗ.ВОД1ИТСЯ при равенстве числа оборотов валов следящей и грузовой частей лебедки. Для одповременного подъема носовой и кормовой подвесок 9 катера нормально открытые контакты 16 и П носовой и кормовой лебедок объединяются в одну носледовательную цепь.
В случае, если одна из Сгконечностей катера окажется на вершине, а другая - на подошве, либо в другом промежуточиом положепин муфты обеих лебедок ие замкнутся и замыкание произойдет только при положении обеих оконечностей катера у вершины волны.
При опускании катера на волне э.д.с. тахогенератора будет складываться с эталонным напряжением но величине н знаку, и поэтому реле 12 временн не будет включено, а нормально открытый контакт 16 в цепп исполнительного реле 19 будет .разомкнут, что исключит выдачу нмпульса на замыкание муфт 3 и 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЕ УСТРОЙСТВО для СПУСКА и ПОДЪЕМА БОЛЬШЕГРУЗНЫХ КАТЕРОВ НА ВОЛНЕНИИ | 1973 |
|
SU387879A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| Спуско-подъемное устройство | 2018 |
|
RU2735444C2 |
| Судовое грузовое устройство для безударной передачи груза в море | 1985 |
|
SU1255508A1 |
| Устройство для спуска и подъема большегрузных катеров и других плавающих объектов | 1972 |
|
SU500114A1 |
| Устройство для регистрации точности движения штангиста | 1974 |
|
SU659158A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Тиратронное устройство для автоматического управления асинхронным двигателем | 1960 |
|
SU139412A1 |
| Устройство для управления электроприводами механизмов подъема стрелового крана | 1990 |
|
SU1761657A1 |