Устройство предназначено для систем навигации и управления подвижными объектами.
Известные устройства для измерения угла рыскания содержат следяш,ую ситему, усилитель которой через переключатель связан с сельсином-приемником и датчиком нулевого положения, а выход подключен механически через управляемые муфты к статору и ротору сельсина и к датчикам угла и нулевого положения.
Предлагаемое устройство отличается от известных тем, что в нем механически связанные с редуктором следящей системы датчики угла рыскания и нулевого положения подключены через управляюндую муфту к ротору сельсинаприемника. Это позволяет унростить устройство и повысить точность установки нулевого положения.
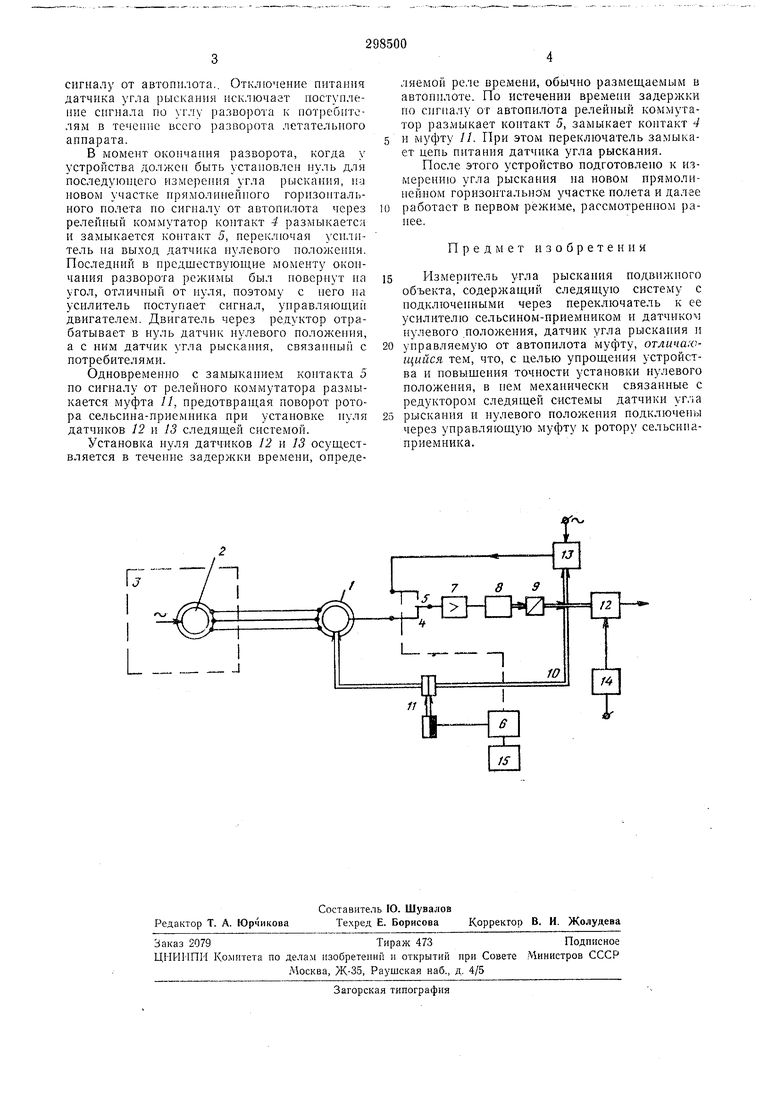
Функциоиальная схема нредлагаемого устройства приведена на чертеже. Она содержит сельсин-приемник /, сельсин-датчик 2 курсовой системы 3, нормально замкнутый 4 инормально разомкнутый 5 контакты коммутатора 6, усилитель 7 следящей системы, двигатель 8, редуктор 9, цепь 10 главной обратной связи, управляемую электромагнитную муфту //, датчик 12 угла рыскания, датчик 13 нулевого положения, переключатель 14 питания и автопилот 15.
Работа устройства заключается в следующем.
Статор сельсина-приемника связан сельсинной дистанционной трансформаторной передачей со статором селЕ,сина-датчпка курсовой системы.
В режиме измерения угла рыскания сигнал, пропорциональный углу рыскания через н. з. контакт релейного коммутатора 6 поступает на усилитель, усиливается и управляет двигателем, который через редуктор новорачивает на угол рыскания датчик 12, связанный с потребителями, и датчик 13, нредназначенный для установки нуля устройства. При этом ротор сельсина-приемннка согласуется со статором по цепи главной обратной связи через нормально замкнутую электромагнитную муфту, управляемую релейным комл утатором.
В режиме разворота летательного аппарата с ротора сельсина-приемника на вход усилителя поступает сигнал, пропорциональный углу разворота летательного аппарата, который пеобходимо скомпеиснровать. В этом режиме следящая система, состоящая из усилителя, двигателя и редуктора, работает идентично рассмотренному выше, но с датчика угла рыскания отключается питанне при помощи переключателя 14.
сигналу от автопилота.. Отключение питания датчика угла рыскаиия исключает поступление сигнала по углу разворота к потребителям в течение всего разворота летательиого аппарата.
В момент окончания разворота, когда v устройства должен быть установлен нуль для последуюи1,его измерения угла рыскания, на ИОВОМ участке прямолинейного горизоитального полета но сигиалу от автопилота через релейный коммутатор коитакт 4 размыкается и замыкается контакт 5, переключая усилитель иа выход датчика пулевого положения. Последний в предшествующие моменту окончания разворота режимы был повернут на угол, отличный от нуля, поэтому с пего на усилитель поступает сигнал, управляющий двигателем. Двигатель через редуктор отрабатывает в нуль датчик нулевого иолол ения, а с ним датчик угла рыскания, связанный с потребителями.
Одновременно с замыканием контакта 5 по сигналу от релейного коммутатора размыкается муфта 11, предотвращая поворот ротора сельсина-приемника при установке нуля датчиков 12 и 13 следящей системой.
Установка иуля датЧИков 12 и 13 осуществляется в течение задержки времени, определяемой реле времени, обычно размещаемым в автопилоте. По истечении времени задержки но сигналу от автопилота релейный коммутатор размыкает коитакт 5, замыкает коитакт 4
и муфту п. При этом переключатель замыкает цеиь питания датчика угла рыскания.
После этого устройство подготовлено к измерению угла рыскания иа новом прямолинейиом горизо1ггальном участке полета и далее
работает в первом- режиме, рассмотренном ранее.
Предмет изобретения
Измеритель угла рыскания подвижного объекта, содержащий следящую систему с подключенными через переключатель к ее усилителю сельсином-приемником и датчиком нулевого положеиия, датчик угла рыскаиия и
управляемую от автопилота муфту, отлича: щийся тем, что, с целью упрощения устройства и повышения точности установки нулевого положеиия, в нем механически связанные с редуктором следящей системы датчики угла
рыскания и нулевого положения подключен через управляющую муфту к ротору сельсинаприемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1977 |
|
SU728116A1 |
| ПАТЕИТЙО-ТЕХННЧССНДЙБИБЛИОТЕКАА. И. Ангели | 1972 |
|
SU337659A1 |
| Устройство для регистрации ширины дражного забоя | 1982 |
|
SU1082917A1 |
| Следящая система | 1981 |
|
SU999016A1 |
| Устройство управления весовым дозатором непрерывного действия | 1980 |
|
SU918795A1 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Устройство для регулирования скоростиэлЕКТРОпРиВОдА пОСТОяННОгО TOKAC дВуМя дВигАТЕляМи | 1978 |
|
SU811475A2 |
| Система дистанционного управления агрегатом | 1959 |
|
SU128923A1 |
| Имитатор бортовой навигационной радиолокационной станции | 1963 |
|
SU580534A1 |
//
