Изобретение относится к области автоматики и вычислительной техники, а именно к устройствам, преобразующим угол .поворота вала в цифровой код.
Известна система преобразования угол- код, содержащая многополюсный датчик и два двухполюсных шрием-ника, роторы которых кинематически соединены с валом многоотчетного преобразователя угол - код и с валом исполнительного двигателя.
Для уменьшения динамической ошибки преобразования в предлагаемую систему дополнительно введены многоотсчетный преобразо.ватель угол - код и исполнительный двигатель, валы которых кинематически связаны со статором приемника канала точного отсчета.
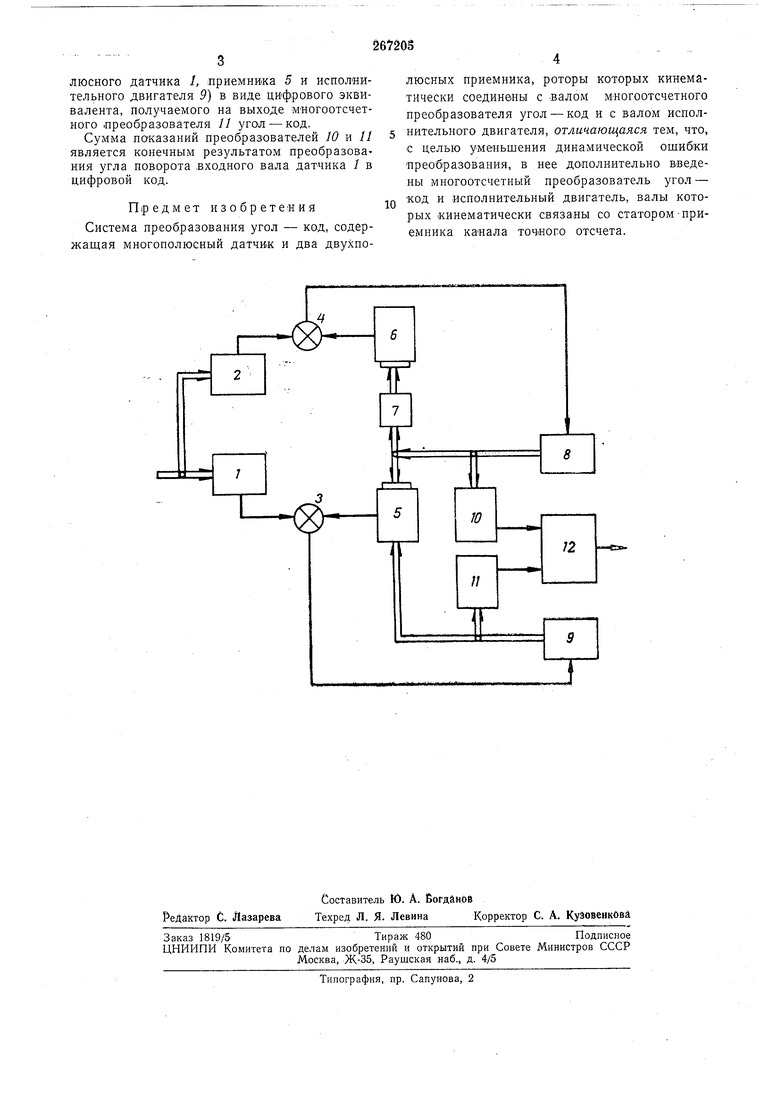
На чертеже показана схема предлагаемого устройства.
Система преобразования угол - код содержит многополюсный датчик / угла точного, отсчета и двухполюсный датчик 2 угла грубого отсчета, электрически -связанные соответственно через уст1ройство 3 сравнения точного отсчета и устройство 4 сравнения грубого отсчета с двух.полюсным приемником 5 точного отсчета (с подвижным статором и. подвижным ротором) и двухполюсным приемником 6 грубого отсчета (с неподвижным статором и подвижным ротором). Роторы устройств 4 и
5 кинематически связаны между собой редуктором 7 и нриводятся в движение исполнительным двигателем 8 грубого отсчета, электрически Подключенным к устройству 4 сравнения грубого отсчета. Подвижный статор приемника 5 точного отсчета приводится в движение дополнительным двигателем 9 точного отсчета, электрически подключенным к устройству 3 сравнения точного отсчета. С валом
двигателя 8 кинематически сопрягается вал многоотсчетного преобразователя W угол - код грубого отсчета, а с валом двигателя 9 кинематически сопрягается вал многоотсчетного преобразователя // угол - код точного
отсчета. Выход последнего электрически соединен с одним входом сумматора 12, другой вход которого подключен к выходу преобразователя 10. Поворот входного вала датчика 1 преобразуется с помощью следящей системы грубого отсчета (состоящей из датчика 2, приемника 6, устройства 4 сравнения, редуктора 7, исполнительного двигателя 8 и многоотсчетного преоб,разователя 10 угол - код) в цифровой
эквивалент со статической и динамической ошибкой, определяемыми точностью датчика 2 и приемника 6, а также скоростью поворота ВХОДНОГО вала.
люсного датчика /, приемника 5 и исполнительного двигателя 9) в виде цифрового эквивалента, получаемого на выходе многоотсчетного .преобразователя 11 угол - код.
Сумма показаний преобразователей 10 и // является конечным результатом преобразования угла поворота входного вала датчика / в цифровой код.
Предмет изобретемия Система преобразования угол - код, содержащая многополюсный датчик и два двухполюсных приемника, роторы которых кинематически соединены с валом Многоотсчетного преобразователя угол - код и с валом исполнительного двигателя, отличающаяся тем, что, с целью уменьшения динамической ошибки Преобразования, в нее дополнительно введены многоотсчетный преобразователь угол - код и исполнительный двигатель, валы которых кинематически связаны со статором-приемника канала точного отсчета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Двухканальный преобразователь угла поворота вала в код | 1976 |
|
SU607248A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU788140A1 |
| Преобразователь "аналог-код | 1974 |
|
SU519748A1 |
| Двухотсчетный преобразователь уголкод | 1974 |
|
SU482785A1 |
| Устройство для преобразования угла поворота вала в код | 1976 |
|
SU640353A1 |
| Фазовая система преобразования угла поворота в код | 1974 |
|
SU567163A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| Устройство для проверки преобразователей угол-код | 1976 |
|
SU743005A1 |
