Изобретение относится к автоматике и вычислительной технике и может быть использовано для связи аналоговых источников информации с цифровым вычислительным устройством.
Известны преобразователи угла поворота вала в коа, содержащие установленные на валу двухполюсный и многополюс- ный датчики угла, подключенные к соответствующим приемникам угла, выходы которых подключены к селектору, выход селектора через усилитель поцключен к двигателю, кинематически связанному с приемниками угла l 1.
Недостатком таких преобразователей является значительная динамическая погрешность.
Наиболее близким техническим решением к изобретению является преобразователь угла поворота вала в код, содержащий установленные на валу первый и второй многополюсные датчики угла, подключенные соответственно к первому и второму приемникам угла, валы кото-
рых 1{инематически связаны между собой, выход первого приемника угла подключен к одному входу элемента сравнения, выход которого через первый усилитель подключен к первому двигателю, кинематически связанному с отсчетным блоком и третьим приемником угла, выход которого подключен к другому входу элемента сравнения, выход второго приемника угла через второй усилитель под10ключен к второму двигателю, кинематически связанному с первым и вторым приемниками угла 2 .
Недостатком преобразователя является значительная динамическая погрешISность.
Цель изобретения - повышение точности преобразователя.
Поставленная цель достигается тем, что в преобразователь угла поворота
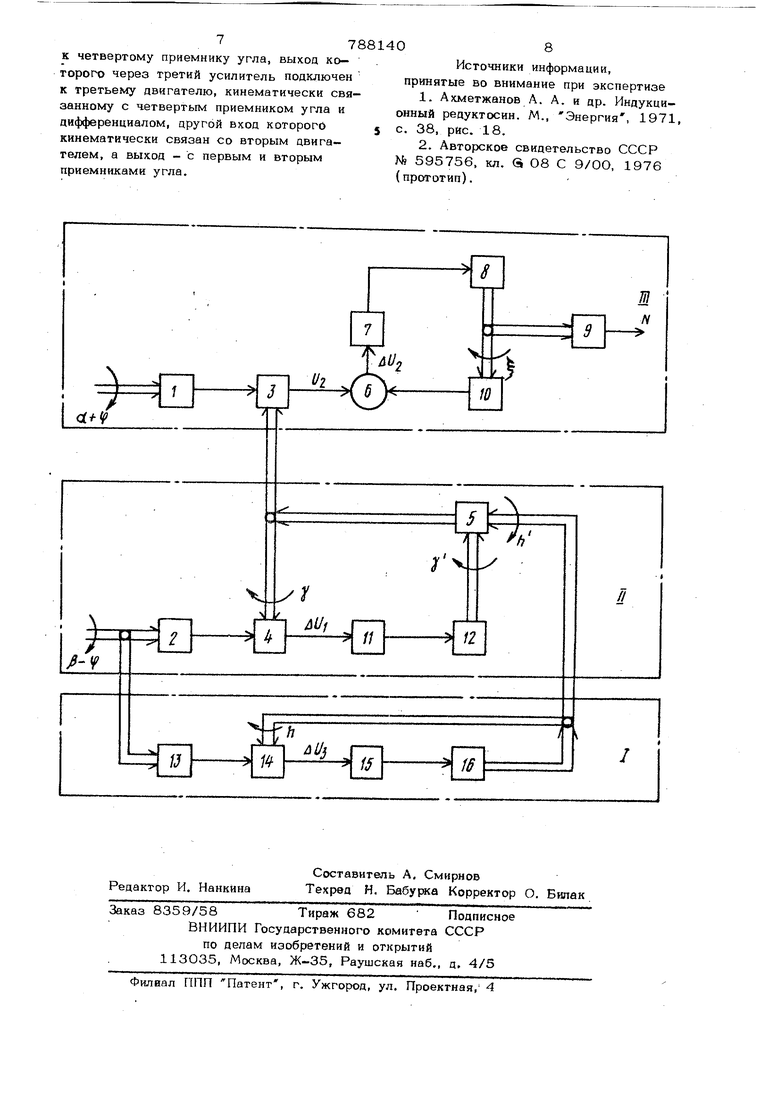
20 вала в код, содержащий установленные на валу первый и второй многополюсные датчики угла, подключенные соответственно к первому и второму приемникам 378S140 угла, валы которых кинематически сьяааны между собой, выход первого приемника угла подключен к одному входу элемента сравнения, выход которого через первый усилитель подключен к первому двигателю, кинематически связанному с отсчетным блоком и с третьим приемником угла, выход которого подключен к другому входу элемента сравнения, выход второго приемника угла через второй усилитель подключен к второму двигателю, введены двухполюсный датчик угла, четвертый приемник угла, третий усилитель, третий двигатель и дифференциал, причем установленный на валу двухполюсный датчик угла подключен к четвертому приемнику угла, выход которого через третий усилитель подключен к третьему двигателю, кинематически связанному с четвертым приемником угла и дифференциалом, другой вход которого кинематически связан со вторым двигателем, а выход - с первым и вто рым приемниками угла. На чертеже представлена структурная схема устройства. Устройство содержит первый 1 и вто- . рой 2 многопопюсные датчики угла, подключенные к двухполюсным приемникам 3 и 4 угла, кинематически связанным с выходом дифференциала 5. Выход приемника 3 угла соединен с одним входом блока 6 сравнения, выход которого подключен через усилитель 7 к исполнительному двигателю 8, на валу которого установлены отсчетный блок 9 и третий двухполюсный приемник 10 угла, выход которого соединен с другим входом блока 6 сравнения. Выход приемника 4 через усилитель 11 подключен к двигателю 12, кинематически связанному с входом дифференциала 5. Двухполюсный датчик 13 угла установлен на одном валу с многополюсными датчиками 1 и 2 угла. Датчик 13 угла подключен ко входу двухполюсного приемника 14 угла, выход ко торого подключен через усилитель 15 к исполнительному двигателю 16. Вал двигателя 16 кинематически связан с приемником 14 угла и другим входом дифференциала 5. Датчик 1 угла, приемники 3 и 1О, усилитель 7, двигатель 8, блок 6 сравнения образуют следящую систему Ш. Аналогично, датчик 2, приемник 4, усилитель 11, двигатель 12 образуют следящую систему П, а датчик 13, приемник 14, усилитель 15 и двигатель 16 - следящую систему I. чик вы фи где ме «t ни ни уг по ни эт 1 а ро но Р на ты В он г ыходные сигналы многополюсных датв 1 и 2 угла пропорциональны углоположениям и - с коэфентом электрической редукции р , 4.. ..; 1-Чл,1П гармоническая по- Iti - Т , f уу, - ее амплитуда, Т - период, - текущее время. ти сигналы поступают на вход приемв 3 и 4 угла. Выхопной сигнал прием14 А U-)). п зопорциональный угловой вой величине ()-li4u.|,-bu,Q V. - угловая погрешность датчика . 13 и приемника 14 угла; - угловое положение приемника 14; амплитуда динамической ошибки следящей системы I, состоящей из элементов 13 - 16 при отработке гармонической помехи; Дць)- модуль частотной переааточной функции разомкнутой системы 1 при и; ч о/ц г J- , упает через усилитель 15 на нс олльный двигатель 16. Под действием го сигнала исполнительный двигатель разворачивает ротор приемника 14, есте с ним через дифференциал 5 ры приемников 3 и 4 до согласован, положения, т. е. на угол hp -4- -ik1i -/ 9m оры приемников 3 и 4, установленные ене оборота, равной 360/р, развернупри этом на угол одной сигнал приемника 4, пропорциьный разности (р-«).|ь + л-зг--Ь й(Ь - погрешность датчика 2; - погрешность приемника 4; у - дополнительное угловое положение приемника 4; - амплитуда динамической ошибки следящей системы П, состоящей из элементов 2, 4, 11, 12, при отработке динамической ошибки системы Ц; 2.() модуль частотной передаточной функции разомкнутой системы П при (jy т Cfn - tS- , поступает через усилитель 11 на испол нительный двигатель 12. Под действием этого сигнала ошибки двигатель 12 чер дифференциал 5 разворачивает ротор при емника 4, а вместе с ним ротор приемника 3 на дополнительный угол J , пр котором 6. и , т, е. на угол (fi 4) И1 учитывая, что b-ph«p()pc, получают -y p Ci-jr-fiklip-pe - у. Так как уг поворота ротора, приемника 4 равен сум ме угловых положений V - то роторы приемников 3 и 4 развернуты н угол ((Ь-1)-)-д.( на вход блока 6 сравнения поступает сигнал выхода приемника 3, пропорциональный сумме ).d-+ )+ . Где ДсС - погрешность датчика 1; Д - погрешность приемника 3. На выходе блока 6 сравнения образуется сигнал ошибки Л. , пропорциональный разности Ui -p(ot(.)-Cu.dL «й Ъ- -С ЗГ-ьй.), где погрешность приемника 10; 6 - угловое положение приемника 10. Под действием этого сигнала ошибки исполнительный двигатель 8 разворачивает ротор приемника 1О угла до согласованного положения, т. е. на угол - р (а. (Ь - () 4 й.Згi-й,1| 6 На выходе отсчетного устройства 9 фик- . сируется числовой эквивалент N (код), пропорциональный величине ... ew Н р .р Для многополюсных датчиков угла число пар полюсов р обычно составляет 64-128, величиный а,1, 5оставляют несколько минут (для синус- до-косииусных враа.аюшихся трансформаторов, сельсинов). Поэтому величина да. не превышает угловых секунц. Остатки гормоничес- ew Qi кой помехи равны-----j- , fehtЧ«г ) Для прецизионр A.,(() ных следящих систем выполняется услоIвне Ац(«-х,/, А fu/n) , причем, A- fu;«:V AlCuV составляет обычно величину не менее 10О. Поэтому при амплитуде гармонической помехи в несколько единиц - десятков градусов и периоде в единицы - десятки секунц остатки гармонической помехи на выходе устройства составляют единицы угловых секунд. Таким образом, числовой эквивалент соответствует сумме угловых положений валиков объекта с ошибкой, не превышающей единицы угловых секунд, при действии на оси объекта гармонической помехи. Экспериментальные исследования предлагаемого устройства подтверждают его эффективность. Так, например, при действии гармонической помехи с амплитудой 15 и периодом 6 с на входе устройства ее остатки на выходе не превышают 10, в то время как устройство без введенных Iэлементов имеет остатки помехи на вы- ходе, равные 7 - 10. Использование предлагаемого устройства значительно повышает точность преобразования двух угловых величин при воздействии на оси объекта гармонической помехи. Формула изобретения Преобразователь угла поворота вала в код, содержащий установленные на валу первый и второй многополюсные датчики угла, подключенные соответственно к первому и второму приемникам угла, валы которых кинематически связаны между собой, выход первого приемника угла подключен к одному входу элемента сравнения, выход которого через первый усилитель подключен к первому двигателю, кинематически связанному с от- счетным блоком и с третьим приемником угла, выход которого подключен к дру- гому входу элемента сравнения, выход второго приемника угла через второй усилитель подключен к второму двигателю, отличающийся тем, что, с целью повышения точности преобразова- теля, в него введены двухполюсный датчик угла, четвертый приемник угла, третий усилитель, третий двигатель и диф- , ференциал, причем установленный на валу двухполюсный датчик угла подключен
к четвертому приемнику угла, выход которого через третий усилитель подключен к третьему двигателю, кинематически связанному с ч,етвертым приемником угла и дифференциалом, другой вход которого кинематически связан со вторым двигателем, а выход - с первым и вторым приемниками угла.
Источники информации, принятые во внимание при экспертизе
1.Ахметжанов А. А. и др. Индукционный редуктосин. М., Энергия, 1971, с. 38, рис. 18.
2.Авторское свидетельство СССР J 595756, кл. (а 08 С 9/ОО, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Устройство преобразования угловых величин в код | 1976 |
|
SU595756A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Двухканальный преобразователь угла поворота вала в код | 1976 |
|
SU607248A1 |
| Устройство для отсчета угловых положений вала | 1975 |
|
SU627498A1 |
| Устройство для высокоточной дистанционной передачи угла | 1977 |
|
SU739615A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
