Изобретение относится к области автоматического управления и может быть использовано .при разработке позиционных следящих систем, в том числе позиционных систем программного управления.
Известная позиционная следящая система содержит двигатель постоянного тока, соединенный через ведущую электромагнитную муфту € исполнительным механизмом посредством ходового винта с гайкой, И-СТОЧНИРХ пнтания, соединенный через резистор с якорной цепью двигателя, тормозную электромагнитную муфту, один вал которой соединен с ходовым (ВИНТОМ, а другой заторможен.
Однако на точность остановки исполнительного механизма известной системы влияют такие параметры как время отключения .муфты, время прохождения команды на включение тормоза, а также нестабильность этих времен.
Предлагаемая позиционная система отличается от из вестной тем, что в ней дополнительно установлены усилитель постоянного тока, выход которого через контакт реле датчика положения подключен к управляющей обмотке тормозной муфты, и выпрямительный мост, приче.м одна диагональ люста подключена к резистору цепп якоря двигателя, другая- к резистору, один конец которого соединен со входом усилителя, а другой - с цлюсовой клеммой источника опорного напряжения, к выходу этого Источника подключен задающий
потенциометр, движок которого подключен ко входу усилителя.
Это позволяет повысить точность остановки и сократить время обработки заданной позиции.
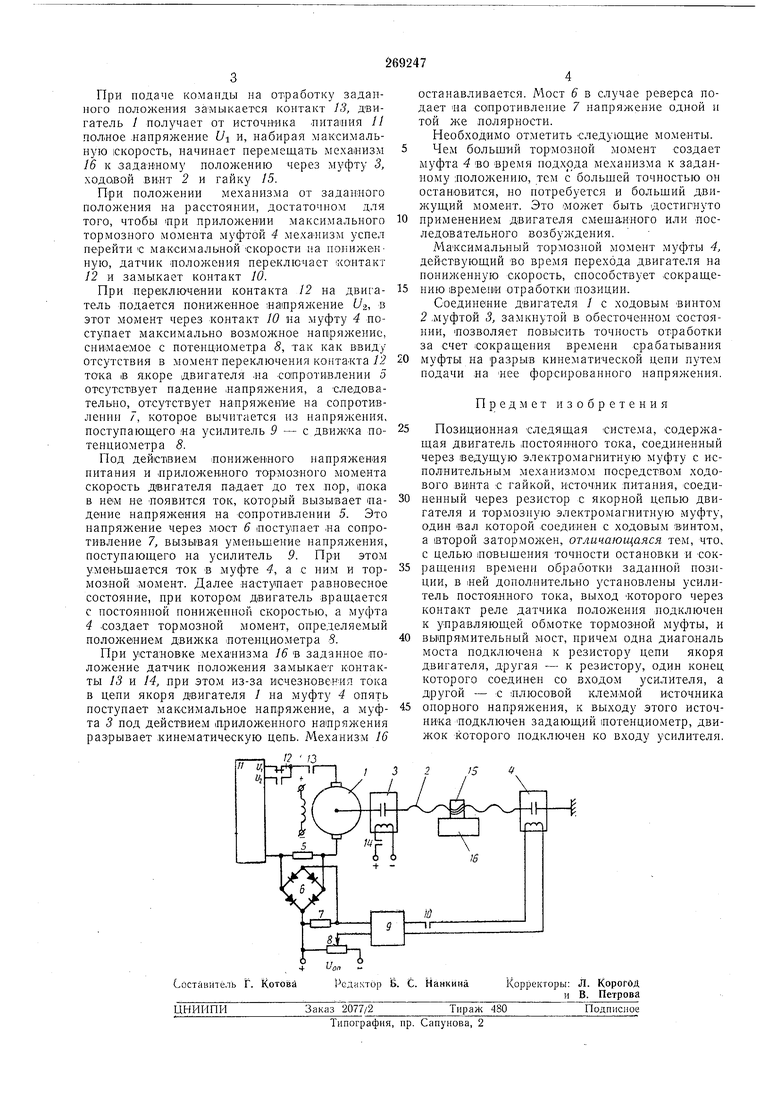
Блок-схема предлагаемой системы приведена на чертеже.
Двигатель / соединен с ходовым винтом 2 через электромагнитную муфту 3. замкнутую
в обесточенном состоянии. Правый конец ходового винта соединен с электромагнитной, например порошковой, муфтой 4, другой вал которой заторможен. В цепи якоря двигателя / имеется сопротивление 5, которое соединено
с выпрямительным мостом 6. Плюсовой выход моста соединен с сонротивлением 7 и потенциометром 8, а минусовый выход моста и движок нотенциометра 5 соединены со входом усилителя 9, выход которого соединен через
контакт 10 с обмоткой муфты 4. Двигатель / соединен с источником питания /У, имеющим два уроВ|Пя напряжения, через переключающий контакт 12 и замыкающий контакт 13. Обмотка муфты 3 соединяется с питающим
напряжением через контакт 14. Ходовой винт 2 охватывается гайкой 15, жестко прикрепленной к рабоче.му механизму 16.
Кроме того, система имеет не показанный на чертеже датчик положения, в который вхо
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОГРАНИЧЕНИЯ ПРЕДЕЛЬНОЙ | 1973 |
|
SU369287A1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| КВАЗИОПТИМАЛЬНАЯ ПО БЫСТРОДЕЙСТВИЮ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326548A1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1976 |
|
SU651988A1 |
| Устройство для поддержания постоян-НОй СКОРОСТи РЕзАНия | 1979 |
|
SU831588A1 |
| Устройство для торможения электровоза | 1990 |
|
SU1766724A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 1973 |
|
SU380970A1 |
| Следящая система | 1973 |
|
SU533912A1 |
| Устройство для стабилизации скорости вращения электродвигателя | 1981 |
|
SU1156230A2 |
| Устройство для измерения уровня электропроводной жидкости | 1979 |
|
SU879311A1 |
