В токоприемниках (пантографах) электроподвижного состава син.хронное движение подвижных рам и миннмальное отклонение верхнего узла от вертикали в дианазоне рабочей высоты достигается выбором оптимальных размеров элемептов механизма антипараллелограмма, более точным изготовлением деталей и жесткой сборкой узлов.
Известные механизмы ангипараллелогракЕма состоят из двух рычагов, жестко закреплениых на главных валах токопрпемника, и тяги, шарнирно соединенной с этими рычагами. Однако очень большая разница в длине плеч подвижиых рам токоприемника и механизма антииараллелограмма незначительное отклонение размеров последнего приводит к резкому асинхронному движению главных валов с подвижными рамами токоириемника, большому отклонению верхнего узла от вертикали, новышенному трению в шарнирных соединениях и затрудняет регулировку характеристик (контактного нажатия, опускаюш;его усилия и др.).
Целью описываемого изобретения является обеспечение мииима ьного отклонения верхнего узла токоприемника от вертикали. Это достигается тем, что один из рычагов механизма антинараллелограмма закреплен шарнирно относительно вала и после регулировки жестко фиксируется.
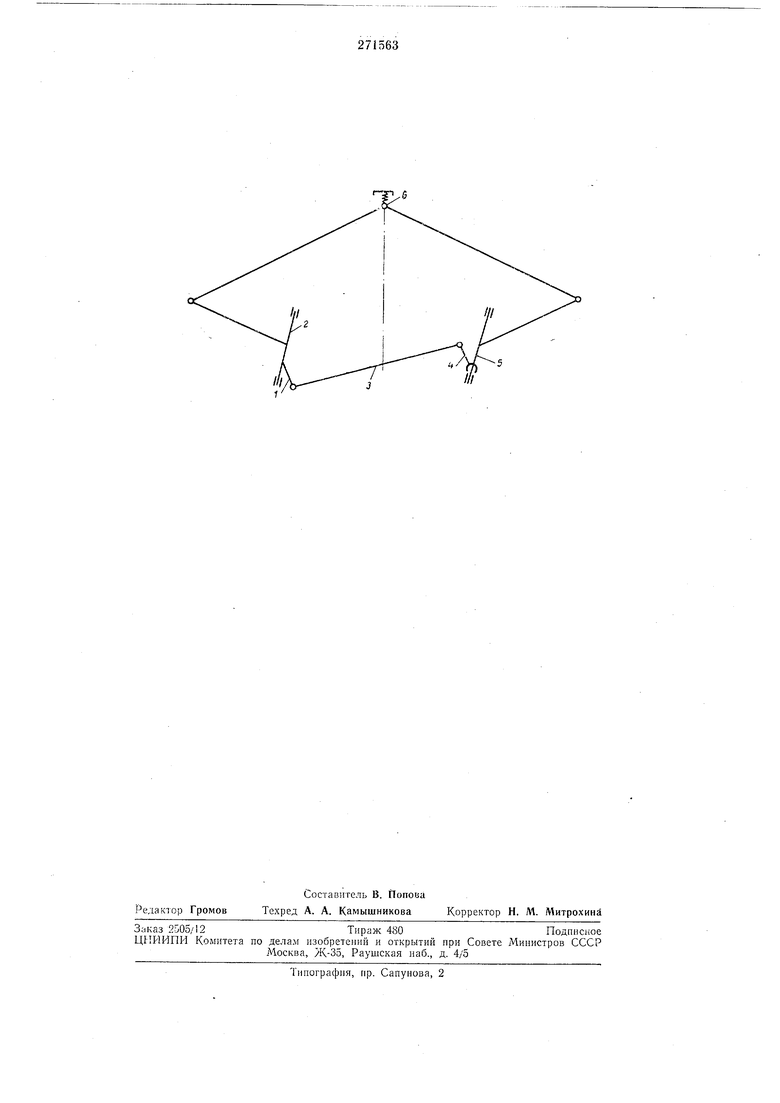
На чертеже изобрг;жена кинематнческая схема предлагаемого механизма.
Рычаг / жестко закреплен на валу 2 токоприемника согласно выбранному аналитическим путем угловому значению привязки элементов механизма антипараллелограмма. Тяга 3, пмеющая регулпровочное звено для нзменения длины, шарнпрно связана с рычагами I и 4. Рычаг 4 шарнирпо закреплен на валу 5 токопрпемппка п может менять положение по углу относптельно по.млнального (расчетного) на определенною велпчину.
Путе.м регулировкп токопрпемника измепением положения рычага 4 п длины тяги 3 достигается минимальное отклоиепие верхнего узла 6 от вертикали. После регулировки рычаг 4 жестко фиксируется огиосительно вала 5.
П р е д мет и з о б р е г е и п я
Механизм аитипараллелограмма токоприемника электроподвижиого состава, содержащий два рычага, закреплеиных на главных валах, 1 тягу, шарнпрно соединенную с рычагами, отличаюишися тем, что, с целью обеспечения мпни.мальио10 отклонения верхнего узла токонрнемника от вертикали, один из рычагов закреплен шарнирно на главном валу с последующей жесткой фиксацией.
| название | год | авторы | номер документа |
|---|---|---|---|
| Токоприемник для электроподвижного состава с автоматическим аварийным опусканием | 1976 |
|
SU539793A1 |
| КАРЕТКА ПЛУНЖЕРНО-РЫЧАЖНОГО ТИПА ДЛЯ ПАНТОГРАФОВ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1967 |
|
SU197674A1 |
| Токоприемник транспортного средства | 1986 |
|
SU1418110A1 |
| Токоприемник электроподвижного состава | 1973 |
|
SU443798A1 |
| ТОКОСЪЕМНОЕ УСТРОЙСТВО | 2001 |
|
RU2191708C2 |
| Механизм антипараллелограмма токоприемника электроподвижного состава | 1983 |
|
SU1237488A1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2428327C1 |
| ТОКОПРИЁМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2800163C1 |
| УСТРОЙСТВО для ШТАБЕЛИРОВАНИЯ, СОРТИРОВКИ, | 1968 |
|
SU220144A1 |