Описываемый механ 13м предназначен для станков токарной группы и других видов.
В известных устройствах, предназначенных для автоматического останова на упоре рабочего органа станка, уменьшение передаваемого момента и скорости движения неред набеганием рабочего органа на упор производится управлением муфты основного привода или непосредственным переключением основного привода на вспомогательный от отдельного электродвигателя.
В известных механизмах электродвигатель вспомогательного привода связан с ходовым валом цепи основного привода. При набегании рабочего органа на упор сказывается возникающее в звеньях вепомогательной цепи трение движения, причем на рабочий орган действует сила, определяемая номинальным моментом вспомогательного электродвигателя.
Для повышения точности останова рабочего органа станка на упоре в описываемом механизме вспомогательная цепь подач снабжена муфтой, например конусно-роликовой, устанавливаемой непосредственно перед ходовым валом привода рабочего органа, конструкция которой позволяет регулировать передаваемый крутящий момент, причем цепь основного привода сиабжена муфтой, например шариковой, устанавливаемой непосредственно на валу реечной шестерни, конструкция которой позволяет уменьшить влияние ииерциоиности цеип на процесс останова.
Конусно-роликовая муфта механизма выполнена нз двух пар колец с коническими фрпкционными поверхностями, расположенными вершинами конусов навстречу друг другу, ц роликов, зажатых регхлируемой сплои между фрикционными поверхностямгт виутрепппх и наружных колец. Для увеличения передаваемого конусно-роликовой муфтой крутящего момента наружные кольца ее втяполнены упруго-деформируелгыми.
Шариковая муфта механизма останова спабжена фикснрующим устройствол и пружиной
для пepe reщeння ее ведущей полумуфты при расфиксации последпей.
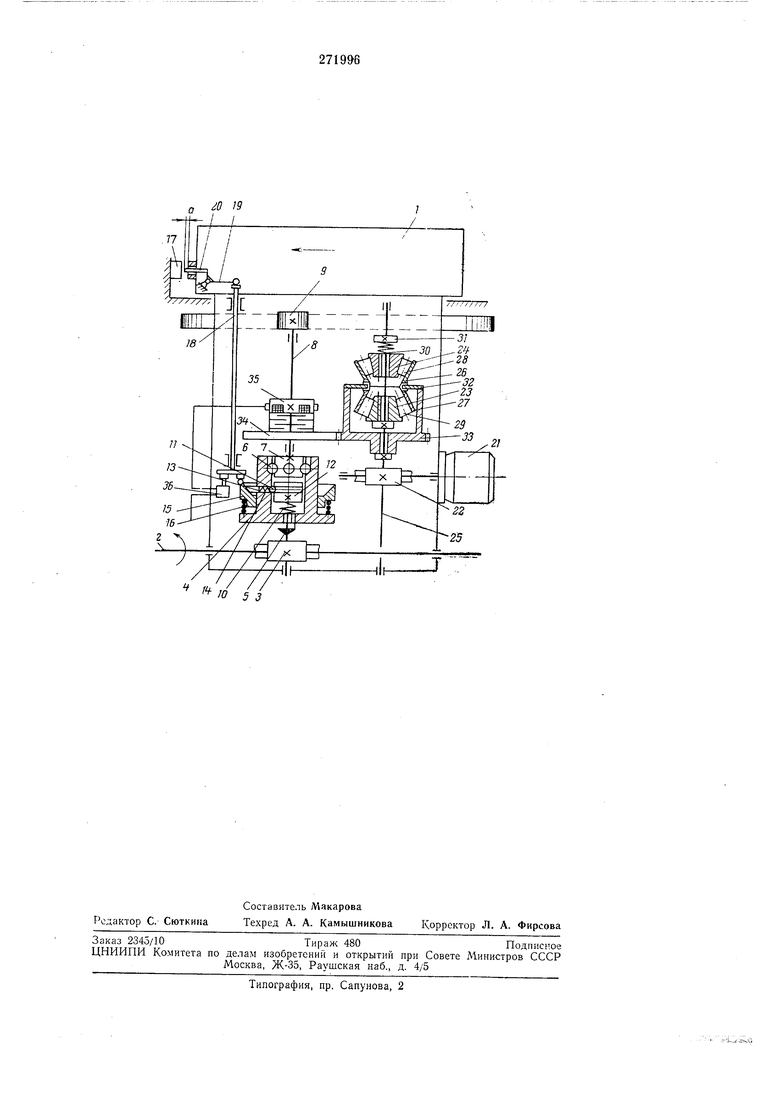
На чертеже изображена кинематическая схема описываемого механизма. Мехагтизм помещается в корпусе рабочего органа / и состоит
нз цепи основного п цепи вспомогательного привода. Цепь основного привода включает в себя ходовой валик 2, понижающие передачи
5и размыкающую : 1уфту. Последняя состоит пз ведмцей полумуфты 4, соединенной скользящей шпонкой с ведущим валом 5, шариков
6для передачи крутящего момента от ведущей иолум -фты -/ на ведущ ю полумуфту 7, посаженную жестко на вал 8 реечной шестерни Я размыкающей пружины 10 и фиксируюшарик и, расположенный в кольцевом пазу втулки 12, жестко соединеииой с ведущим валом 5, пружину 13, толкатель 14, втулку 15 с внутреиней конической проточкой, пружину 16. Для включения муфты при соприкосновении рабочего органа с упором 17 служит штанга 18, рычаг 19, штифт 20.
Цепь вспомогательного привода включает в себя вспомогательный электродвигатель 21, понижаюш,ую передачу 22, конусно-роликовую муфту, состояш,ую из внутренних колец 23 и 24 с наружными коническими фрикционными поверхностями, направленными вершинами конусов навстречу друг другу (причем кольцо 23 л естко закреплено на валу 25, а кольцо 24 закреплено на валу 25 через скользящую шпонку), наружных колец 26 и 27, соединенных между собой, с внутренними коническими фрикционными иоверхностями, направленными вершинами конусов навстречу друг другу, конических роликов 28 и 29, залсатых регулируемой силой меладу коническими фрикционными поверхностями внутренних и наружных колец, нал имной 30 и регулировочной гайки 31.
Для передачи крутящего момента от конусно-роликовой муфты к реечной шестерне 9 служат иоводки 32, шестерни 33, 34, электромагнитная муфта 35, закрепленная на валу 8. Для выключения электромагнитной муфты 35 установлен конечный выключатель 36. Механизм работает следующим образом. На расстоянии а рабочего органа 1 от упора 17 щтифтом 20 через рычаг 19 и штангу 18 сдвигается втулка 15. В результате ослабляется сила налшма 13 на фиксирующий щарик 11, и выключающая пружина 10 сдвигает ведущую полумуфту 4 в осевом направлении.
Шарики 6 выходят из продольных пазов ведущей полумуфты на ее цилиндрическую проточку, и передача крутящего момента от ходового валика прекращается.
Одновременно штанга 18 налсимает на кнопку конечного выключателя 36, в результате чего включается электромагнитная муфта 35 и подвод рабочего органа к упору осуществляется на ностоянной скорости вспомогательным приводом. До набегания рабочего органа 1 на упор 17 движение от электродвигателя 21 на реечную шестерню 9 передается через конусно-роликовую упругую муфту без относительного проворота деталей в ней. Когда рабочий орган 1 набегает на упор 17, реечная шестерня 9, шестерни 33 и 34 останавливаются.
Крутящий момент от электродвигателя 21 передается к реечной шестерне 9 через конусно-роликовую упругую муфту, в которой иарул ные упругие кольца 26 и 27 неподвижны, а ролики 28, 29 и внутренние кольца 23 и 24, связанные с валом 25, вращаются с постоянной скоростью.
Ролики 28, 29, перекатываясь по внутренним коническим фрикцпоииым поверхностям нарула ых колец 26, 27, деформируют их, т. е. гонят упругую волиу, в результате чего муфта может передать крутящий момент значительно больщий, чем в случае выполнения наружных колец л есткпми. Таким образом, передача крутящего момента копуспо-роликово. муфтой осуществляется за счет сил трения ка
чения роликами 28, 29, впутрениими 2; 24 и наружными 26, 27 кольцами, а также Зс счет упругой деформации нарулхпых колеь 26, 27.
Рабочий орган / поджимается к упору /7 до
окончания переходного процесса.
Электродвигатель 2У при коротких ходах рабочего органа может быть включенным постоянно, а при длительиых циклах - включаться одновременно с включением электромагнитной муфты 55 и выключаться после окончания переходного процесса.
Предмет изобретения
1.Механизм автоматического останова на упоре рабочего органа станка, приводимого от ходового вала через реечную передачу со вспомогательной подачей от отдельного электродвигателя, необходимой для его подвода, выдержки на упоре и по.цлшма с постоянной силой до окончания нереходного процесса останова, отличающийся тем, что, с целью повышения точности останова на упоре, вспомогательная цепь подач снаблсена муфтой, например конусно-роликовой, устанавливаемой непосредственно перед ходовым валом основного привода рабочего органа, конструкция которой позволяет регулировать передаваемый
крутящий момент, причем цепь основного
привода снабжена муфтой, например шариковой, устанавливаемой непосредственно на валу
реечной шестерни, конструкция которой иозволяет уменьшить влияиие инерциониости цепи
на процесс останова.
2.Механизм по п. 1, отличающийся тем, что конусно-роликовая муфта выполнепа из двух пар колец с коническими фрикционными поверхностями, располол енными вершинами
конусов навстречу друг другу, и роликов, залсатых регулируемой силой фрикционными иоверхностями внутренних и нарул ;ных колец.
3.Механизм по пп. 1 и 2, отличающийся тем, что, с целью увеличения передаваемого
конусно-роликовой муфтой крутящего момента, нарулсные кольца ее выполнены упругодеформпруемыми.
4.Механизм по п. 1, отличающийся тем, что шариковая муфта снабл еиа фиксирующим
устройством и пружиной для перемещения ее ведущей полумуфты при расфиксации последней.
0 19
0 5 3
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОТКЛЮЧЕНИЯ ДВИЖЕНИЯ РАБОЧЕГО ОРГАНА СТАНКА ПРИ ЕГО ОСТАНОВЕ | 1972 |
|
SU327969A1 |
| Устройство для передвижения по вертикальным опорам Л.Н.Бульмана | 1991 |
|
SU1796217A1 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОСТАНОВА СУППОРТА | 1971 |
|
SU290812A1 |
| Храповая муфта | 1989 |
|
SU1770632A1 |
| Устройство для защиты от перегрузок привода конусной дробилки | 1982 |
|
SU1069854A1 |
| Силовая передача пускового двигателя внутреннего сгорания | 1984 |
|
SU1227826A1 |
| ГИДРАВЛИКО-ИНЕРЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ, СИСТЕМА УПРАВЛЕНИЯ ИМ, КОРОБКА ПЕРЕМЕНЫ ПЕРЕДАЧ И СПОСОБ ПРЕОБРАЗОВАНИЯ ИМИ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2259282C2 |
| Механизм привода дозирующего органа кормораздатчика | 1986 |
|
SU1335222A1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Привод перемещения подвижного узла | 1980 |
|
SU942936A1 |