Сущность предлагаемого способа управления прицепными сельскохозяйственными машинами заключается в том, что правильность хода сцепки контролируется автоматическим замыканием электрической цепи, осуществляемым соответствующим взаимодействием описываемого ниже приспособления со следом специального сошника.
Предлагаемый способ исключает применение обычных маркеров с применением значительной длины брусьев.
Предлагаемое изобретение касается и приспособления для управления сельскохозяйственными машинами в сцепке по указанному способу. Это приспособление представляет собой устанавливаем}ю на крайней машине сцепки каретку, снабженную системой роликов, которые установлены на поворотных вилках и служат для замыкания той или иной электрической цепи, при опускании соответствующего ролика в бороздку, проведенную сошником.
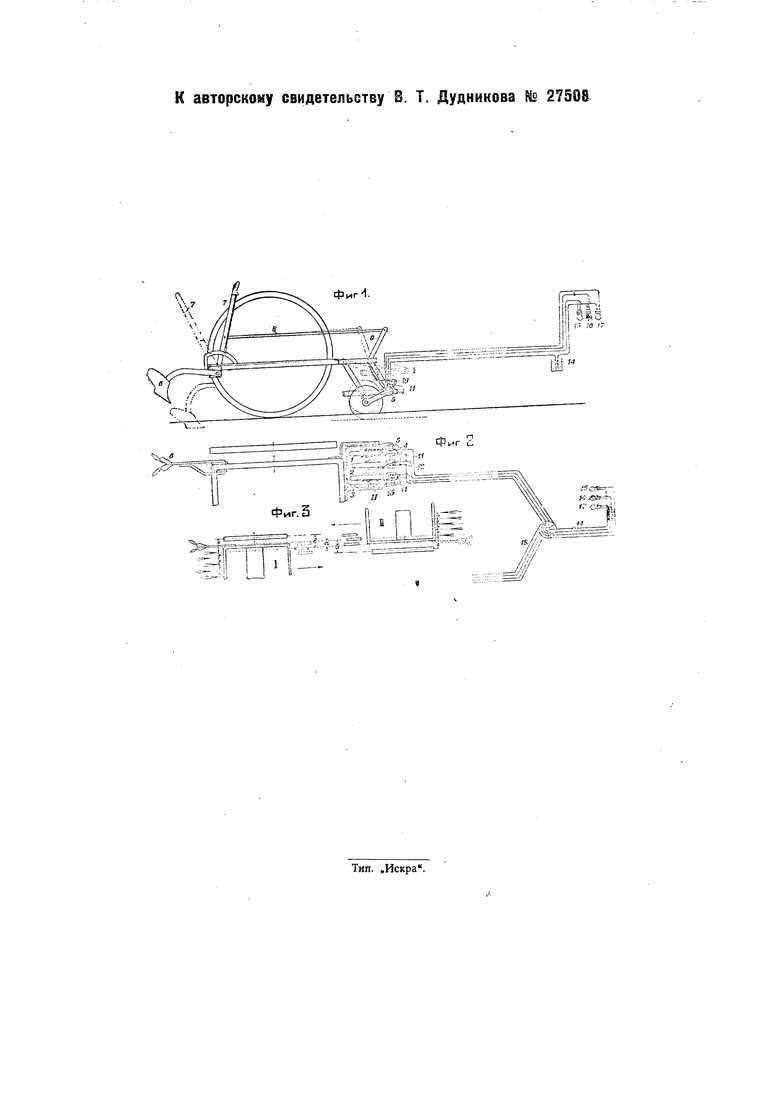
На чертеже фиг. 1 изображает вид приспособления сбоку, фиг. 2-вид его сверху; фиг. 3-схему движения сцепки в двух смегкных заездах.
Согласно изобретению, крайние машины в сцепке с внешних своих сторон снабжаются особыми каретками 4, укрепляемыми на рамах машин и несущими ролики 1, 2, 3, установленные на определенном расстоянии друг от друга. Оси роликов расположены в поворотных вилках, посаженных на общем валике 5. По задней части рамы машины также с ее внешней стороны устанавливается рабочий орган, проводящий бороздку по полю и выполненный в виде окучника или сошника небольших размеров. Для той же цели может быть применен и дисковый бороздильник. Подвесная каретка с роликами и бороздильник включаются в действие попеременно при помощи рычага 7, сопряженного тягой 8 с поворотным рычагом 9, служащим для подъема и опускания каретки.
Если при первом заезде работает бороздильник (карета поднята), то при обратном ходе сцепки, включенная в действие каретка должна иметь такое расположение, чтобы при направлении среднего ролика по дну бороздки, оставленной предыдущим заездом, крайний орган машины (например, сошник) шел бы на расстоянии ширины междурядия, а не от крайнего ряда предыдущего хода. Следы ходовых колес машин (сеялок) перекрываются, если расстояние от середины обода до крайнего рабочего органа (сошника) Ь более половины междурядия а.
На тракторе установлены контрольные электрические лампочки, по действию которь х тракторист определяет, идет ли по дну бороздки средний ролик, один из крайних или ни один из роликов. Осуществляется это следующим образом. Когда на дно бороздки падает один из роликов, он располагается ниже, чем остальные. Вилки роликов имеют отростки 77, несущие на свонх концах медные контакты 761 изолированные от массы. На рамке каретки распололгены кронштейны, несущие контакты 12 и 75. соединенные проводами с элeмeнтo f 14 и контрольными лампочками /5, 16 и 77. Если средний ролик 2 опустился в бороздку, проведе.чнук} предыдущим заездом, то поворотом нилки // замыкается цепь средней лампочки /6. В то же время крайние ролики 7 и . располагаются выше среднего ролика и их контакты на отростках вилок не замыкают цепь лампочек 7J-77 и последние не горят. Как только тракторист сбивается с верного направления, в бороздку попадает один из крайних рол;-:ков, чем средняя лампочка тухнет, а загорается одна из крайних, указывая трактористу, в которую сторону надо исправить ход трактора, пока снова не загорится средняя лампочка.
Если аггрегат на заездах поворачивается только вправо или только влево (работа на одном загоне), то в действии на шдятся одновременно бороздильник на крайней .евой (или правой) машине и каретка на крайней правой (или левой) машине. При необходимости поворачивать аггрегат и вправо и влево (переход с одного загона на другой или работа от одного края поля) необходимо иметь на крайних машинах справа и слева по комплекту, состоящему из бороздильника и каретки. В этом случае, одновременно с поворачиванием аггрегата, лампочки перек. ючаются на дру-гие провода при помощи переключателя 75, При расчете ,ллины вилки роликов, размеров отростка и величины контактов; необходимо предусмотреть некоторое непостоянство у1)овня дна бороздки и предупредить замь кание цепи при известном колебании роликов. 11ровода монтируются частично на тракторе, на сцепке и на .машинах, прк чем поблизости к ркцеп :.ам ставятся четырехконтактные штепсели. Если требуется бороздку после прохода роликов заравнивать, то HEI рамке ро.чиков сзади г.югут бьггь установлены для ЭТ.ОЙ цели диски.
Описанное приспособление может переноситься с одного аггрегата на другой. Приспособление позволяет пользоваться ил так;ке к при ночных работах, когда работа с об.ъгчными маркерагли затруднительна и сопря.жена с риском значительных погрешностей.
Предмет изобретения.
1.Способ управления прицепными сельскохозяйственнымк машинам в сцепке, отлЕчаюшэйся тем, что показателен правильности хода сцепки является автоматическое замыкание электрической пер.к, осуществляемое соответствующим взаигиОдействием специального рабочего ор;а.ча со следом маркера.
2.Приспособление для Зправлек::я при цепными сельскохозяйственнкг.зи машинами в сцепке, отлича зщ-зеея примекеккем установленной на крайней машине каретки, снабженной систеглой поворотных относительно оси 5 роликов 1, 2Л 3, опорные, вилки которых снз.б.ч;екы от(Юст:;г1..И 11, кесущр:ми кзолкронанные контакты, взаимодействующрге с неподвижными контактами 72 -13 и предназначенные для замыкания соответствующей электрической цепи np;i опусканки того или другого ролика 1; бороздку, проведенную марке ром 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования тракторных двигателей во время тяговой работы | 1925 |
|
SU4839A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| ЛЕСОПОСАДОЧНАЯ МАШИНА | 1997 |
|
RU2110907C1 |
| Механизм привода клапанов сеялки СКГК-6 с гладкой проволокой | 1956 |
|
SU107605A1 |
| СПОСОБ УБОРКИ СВЕКЛОВИЧНОЙ БОТВЫ С ЕЕ СИЛОСОВАНИЕМ И ТЕХНОЛОГИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ УБОРКИ СВЕКЛОВИЧНОЙ БОТВЫ | 2011 |
|
RU2457664C1 |
| Модульный многофункциональный транспортно-технологический комплекс | 2022 |
|
RU2785589C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| Способ позицирования прицепной свеклоуборочной машины | 1990 |
|
SU1824039A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Аппарат для автоматического управления рабочими органами сельскохозяйственных машин, технологически связанных с почвой | 1952 |
|
SU100334A1 |