Предлагаемое устройство относится к области систем автоматического унравления и может быть применено для автоматизации различных процессов смешения в производствах нефтехимии и процессов компаундирования топлива и масел, а также в производстве пищевой, фармацевтической, микробиологической промышленности и энергетике.
Известны частотно-импульсные устройства для автол атического управления производительностью дозировочного агрегата (насоса), содержаш,ие датчик числа оборотов, цифровой задатчик частоты, цифровой нуль-орган, управляемые реверсивный и вычитающий счетчики, управляемый умножитель частоты, блок выбора команд управления и исполнительный механизм изменения производительности агрегата (иасоса) с блоком управления.
Предложенное устройство отличается от известных тем, что в нем выходы датчика числа оборотов и цифрового задатчика частоты подключены к входам цифрового нуль-органа, выходы которого подключены к входам управляемого реверсивного счетчика, управляемого умножителя частоты и логического блока выбора команд управления, к другим входам которого иодключены выходы управляемого вычитающего счетчика и управляемого реверсивного счетчика, выходы которого подключены к входам управляемого вычитающего счетчика, и выход этого счетчика подключен к собственному сбросовому входу и к входу управляемого умножителя частоты, причем выходы логического блока выбора команд управления 5 связаны с блоком управления исполнительным механизмом.
Это позволяет повысить точность дозирования агрегатом (насосом) среднего за время переходного процесса значения -заданного ко0 личества продукта.
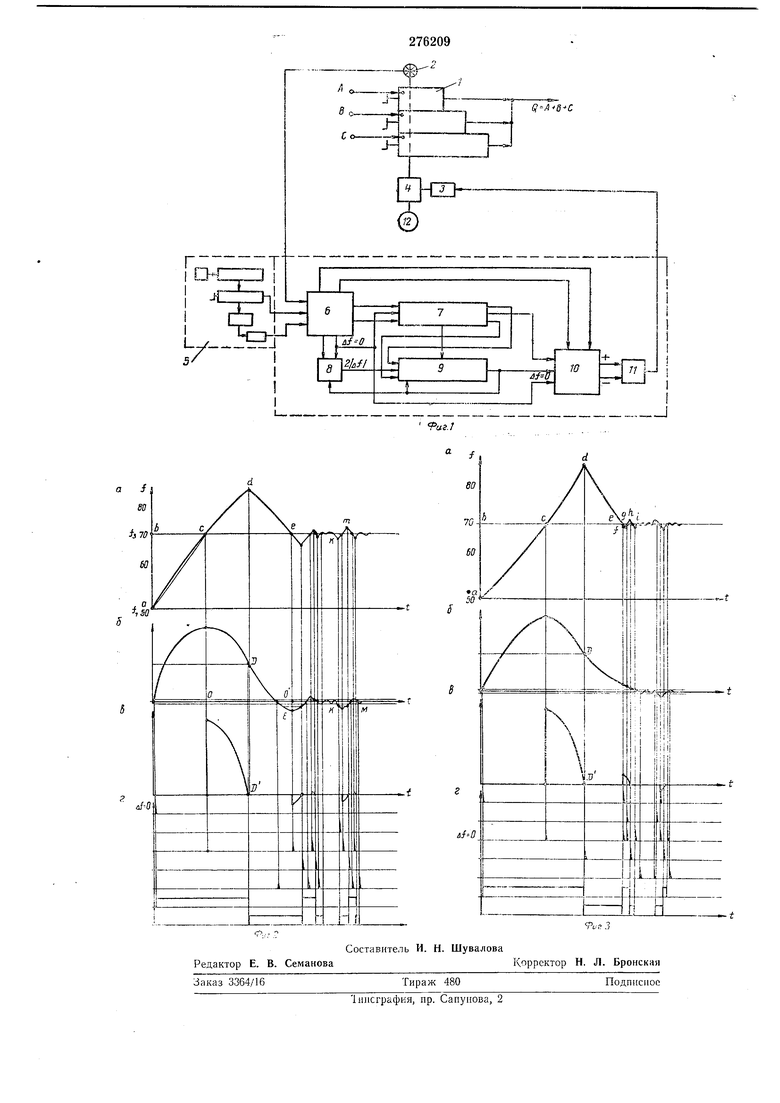
Предложенное устройство содержит дозировочный агрегат 1, датчик 2 числа оборотов с частотно-импульсным выходным сигналом, исполнительный механизм 3, регулирующий орган 4, цифровой задатчик 5 частоты, цифровой нуль-орган 6, управляемый реверсивный счетчик 7, управляемый умножитель частоты 8, управляемый вычитающий счетчик 9 логический блок 10 выбора команд управления,
0 блок управления 11 исполнительным механизмом и дешифратор 12.
На фиг. 1 изображена блок-схема описываемого устройства; на фиг. 2 и 3 - переходные процессы текущего параметра в различных блоках системы, соответствующие первому и второму режимам работы.
Сущность работы устройства заключается в следующем. В чувствительном opraiie системы непрекущего параметра, характеризующего производительность агрегата (насоса). Одновременно производнтся интегрирование сигнала рассогласования между сравниваемыми величинами. При иревышении заранее установленной зоны реакции системы по величине интегрального значения динамической ошибки (ИЗДО) в системе управления вырабатывается сигнал, который в зависимости от знака ИЗДО запускает исполнительный механизм с постоянной максимально возможной для выбранных типов исполнительных механизмов и регулирующего органа скоростью в сторону уменьшения ИЗДи. Б момент компенсации рассогласования сравниваемых сигналов в чувствительном органе системы вырабатывается сигнал, по которому определяется величина ИЗДО. Дальнейшее исиолнптельного механизма определяется необходимостью минимизировать время полной компенсации, образовавшейся ИЗДО. В системе используется релейный закон управления с определением Переключения исполнительного механизма на реверс в момент снисания половины накопленного ИЗДО. В следующий момент компенсации рассогласования теоретически доллсна быть полностью скомпенсирована и величина ИЗДО. Однако из-за нелинейности регулирующего органа, люфтов и инерционности исполнительного механизма в моменты компенсации может оставаться нескомпенсированной некоторая часть ИЗДО, и дальнейшее исполнительного механизма определяется величиной и знаком нескомпенсированной величины ИЗДО. При достижении ИЗДО заданной зоны реакции исполпительный механизм останавливается.
Устройство работать в двух основных режимах, определяемых в основном характеристикой регулирующего органа.
Рассмотрим работу системы в первом .
Многокомпонентный дозировочный агрегат осуществляет приготовление продукта Q в заданном соотнощении А : В : С. Продукт Q затем смешивается с другими компонентами тоже в заданном соотношении Q к этим компонентам.
Управление производительностью дозировочного агрегата осуществляется с помощью исполнительного .механизма 3, меняющего полол ение регулирующего органа 4, который меняет число оооротов привода и линейно зависящую от них производительность дозировочного агрегата L
Всякое изменение задания в системе (каК правило, общего для параллельно работающих агрегатов), а отклонение текущего .тараметра от задания приводит -к переходному процессу регулирования, за время которого накапливается дииа.мическая ошибка но производительности, приводящая к нарущению соотношения продукта Q с другими компонентами.
Па фиг. 2, а изобрал ен переходиый процесс изменения текущего параметра при изменении задания. В цифрово.м нуль-органе 6 производится непрерывное сравнение сигнала с датчика 2 и блока цифрового задатчика 5 частоты и при превышении заданной зоны реакции системы по ИЗДО па выходе появляется сигнал, поступающий на логический блок 10 и запускающий исполнительный .механизм 3 в сторону уменьшения возникшего рассогласования. Исполнительный механизм i начинает с максимальиой постоянной скоростью двигаться в сторону приближения текущего параметра к заданному.
В управляемом реверсивном счетчике 7 ненрерывно производится интегрирование величины рассогласования.
В точке с (см. фиг. 2, а) в цифровом нульоргане 6 возникает сигнал компенсации рассогласования. За время ее в систе.ме накопилось ИЗДО, характеризуемое площадьюАавс. По сигналу, поступивщему на управляемый вход счетчика 7, величина ошибки переписывается в счетчик 9 параллельным кодом, а затем открывается вход умножителя частоты 8, и удвоенная абсолютная величина текущего рассогласования 2/Af/ начинает поступать на счетный вход счетчика 9, списывая находящееся в нем ИЗДО. Направление счета в счетчике 9 определяется знаком величипы рассогласования по триггеру знака счетчика /. Переходный процесс, происходящий в счетчике 7, изобрал ен на фиг. , б, а переходный процесс, происходящий в счетчике 9, - на фиг. 2, в.
После списания половины ИЗДО (точки d, D, D) на выходе счетчика 9 появляется сигнал, поступающий на вход блока 10 и производящий реверсирование исполнительного механизма . Текущий параметр начинает
приближаться к заданию, и в точке е (см. фиг. 2, а) происходит комненсация рассогласования.
Характер нелинейности регулирующего органа 4, инерционность и люфты исполнительиого механизма приводят в реальиой системе X тому, что -ко.мпенсация ИЗДО (точка U на фиг. 2, б) происходит раньше компенсации рассогласования, и ко времени ко.мпенсации рассогласования в точке е в счетчике 7 будет
некоторая величина нескомпенсированной
ИЗДО, характеризуемая величиной ОЕ и
имеющая знак, обратный ИЗДО. В
дальнейшем система работает аналогично.
В момент А/ О (точка е) величина ошибки переписывается в счетчик 9 и после списания ее половины в точке производнтся реверс исполнительного .механизма 3.
Движение текущего параметра будет осуществляться около заданного значения с убывающей величиной перерегулирования. В моменты компенсации рассогласования производится опрос величины ИЗДО. Если меладу двумя опросами (при А/ 0) величина ИЗДО будет меньше установленной зоны реакции О исполнительный механизм 3 останавливается, так как текущий параметр находится в зоне реакции системы по ИЗДО. На правой стороне фиг. 2 изображен переходный процесс при отклонении текущего параметра от задания при различных возмущениях в системе, приводящих в точке к к превыщению установленной зоны реакции по ИЗДО. Характер движения исполнительного механизма в этом случае аналогичен выщеописанному. В момент, соответствующий превыщению зоны реакции системы (см. фиг. 2,6, точка К}, в нуль-органе вырабатывается сигнал, запускающий исполнительный механизм 3 в сторону приближения текущего параметра к заданию. В момент А/ О (точка е) из счетчика 7 переписывается в счетчик 9 величина ИЗДО, и начинается процесс списания этой величины удвоенным значением текущего параметра. В момент списания половины ИЗДО (точки т, М) в счетчике 9 вырабатывается сигнал, реверсирующий движение исполнительного механизма 5. Дальще система работает аналогично выщеописанному. До момента компенсации рассогласования в точке е работа системы во втором режиме аналогична выщеописанному. На фиг. 3, а показан переходный процесс изменения текущего параметра при изменении задания; на фиг. 3, б - переходный нроцесс в счетчике 7; на фиг. 3, S -переходный процесс в счетчике 9. Дальще система .работает по-иному. В силу особенностей нелинейности регулирующего органа 4 процесс списания ИЗДО в счетчике 9 затягивается, и в момент Af О в точке е в системе остается нескомпенсированной некоторая величина ИЗДО того же знака. Поэтому для компенсации этого остатка необходимо за-пустить исполнительный механизм 3 обратно в сторону перерегулирования текущего параметра, т. е. произвести реверс в точке е. Однако в силу инерционности исполнительного механизма 3, сигнал на реверс, выработанный в момент е, воснринимается исполнительным механизмом 3 в точке f, поэтому в системе возникает повторный момент компенсации А/ О в точке g, ложно заставляющий опращивать счетчик 7, поэтому в этом режиме блок 10 подавляет сигнал А/ О в точке g. Затем система работает аналогично выщеописанному режиму. В точке /г после -списания половины ИЗДО производится реверс исполнительного механизма 3. В точке i производится опрос счетчика 7 и реверс исполнительного механизма 5 и т. д. Если между двумя опросами А/ О не появляется сигнал превыщения зоны реакции системы, то по сигналу второго опроса исполнительный механизм останавливается. Аналогично работает система и при отклонении текущего параметра от задания (переходный процесс для этого случая изображен на правой стороне фиг. 3). На фиг. 2, г и 3, г показаны временные графики для основных управляющих сигналов в системе. Предмет изобретения Частотно-импульсное устройство для автоматического управления производительностью дозировочного агрегата (насоса), содержащее датчик числа оборотов, цифровой задатчнк частоты, цифровой нуль-орган, управляемые реверснвный и вычитающий счетчики, управляемый умножитель частоты, блок выбора команд управления и иснолнительный механизм изменения производительности агрегата (насоса) с блоком управления, отличающееся тем, что, с целью повыщения точности дозирования агрегатом (насосом) среднего за время переходного процесса значения заданного количества продукта, в нем выходы датчика числа оборотов и цифрового задатчика частоты подключены к входам цифрового нуль-органа, выходы которого подключены ко входам управляемого реверсивного счетчика, управляемого умножителя частоты и логического блока выбора команд управления, к другим входам которого подключены выходы унравляемого вычитающего счетчика и управляемого реверсивного счетчика, выходы которого подключены ко входам управляемого вычитающего счетчика, и выход этого счетчика подключен к собственному сбросовому входу и ко входу управляемого умножителя частоты, причем выходы логического блока выбора команд управлення связаны с блоком управления исполнительным механизмом.
.
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система управления процессом приготовления смесей | 1973 |
|
SU495647A1 |
| Устройство для управления сопряженными по нагрузке дозировочными агрегатами | 1974 |
|
SU637792A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ НАСОСА-ДОЗАТОРА | 1973 |
|
SU399625A1 |
| Многоканальная система управления процессом приготовления смесей | 1974 |
|
SU732811A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ НАСОСА, ИМЕЮЩЕГО ЛИНЕЙНУЮ ЗАВИСИМОСТЬ ПРОИЗВОДИТЕЛЬНОСТИ ОТ ЧИСЛА ОБОРОТОВ ПРИВОДА | 1970 |
|
SU269253A1 |
| Система для программного управления | 1989 |
|
SU1675847A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАСТРОЙКОЙ ДОЗИРОВОЧНОГО АГРЕГАТА | 1970 |
|
SU269255A1 |
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| ЦИФРОВОЙ СЕРВОПРИВОД | 2016 |
|
RU2643179C1 |