Изобретение относится к области автоматического управления производственными процессами и может быть использовано для непрерывного автоматического приготовления жидких многокомпонентных смесей высокого качества в производствах химической нефтехимической, нефтеперерабатывающей и других отраслей промышленност где применяются дозировочные насосы (агрегаты). Известны многоканальные и многосвязные системы автоматического регулирования и управления,,которые характеризуются несколькими канала- ми управления, содержащими в каждом канале последовательно соединенные измеритель рассогласования, регулятор, исполнительный механизм и датчик регулируемого параметра, причем каналы замкнуты через объект и имею связи между собой 1). Однако при достаточно большом ко честве регулируемых параметров для обеспечения оптимального по быстродействию переходного процесса при возмущениях по заданию требуется большое количество сложных корректи руеьых связей между каналами, что снижает надежность системы и делает ее практически неработоспособной при случайных возмущениях. Наиболее близкой по технической сущности является многоканальная система управления процессом приготовления смесей, содержащая п-I каналов управления, состоящих из последовательно соединенных измерителя рассогласования, блока сравнения, интегрс.ора, порогового устройства, формкрователя сигнала управления, исполнительного механизма и насоса, первый выход которого через датчик регулируемого -napaiMeTpa соединен с первьлм входом измерителя , рассогласования,п-ный канал управления, состоящий из последовательно соединенных измерителя рассогласования, интегратора,порогового устройства, формирователя сигнала управления,исполнительного механизма и насоса,первый выход которого через датчик регулируемого параметра соединен с первым входом измерителя рассогласования, задатчик регулируемого параметра, который через первый масштабирующий блок соединен со вторыми входами измерителей рассогласования всех каналов управления, выход измеритепя рассогласования п-го канала управпеняя через второй масштабирующий блок, соединен со вторыми входами блоков сравнения других каналов управления, блок задания коэффициентов соединен с управляющими входами первого и второго масштабирующих блоков, втоЕЖле выходы насосов всех каналов управления соединены с соответствующими входами объекта регулировани1Я 2 .
В известной системе благодаря уменьшению сложности корректирующих связей повьшается надежность ее работы, В ней воздействуют на тот параметр, который отклонился от ЗсШания в большей степени, чем остальные, и величина этого отклонения превысила некоторжзй порог срабатывания.
Однако эта система эффективно работает только в режиме стабилизации при компенсации случайных возмущений по отдельным параметрам. При изменении по заданию система может принять устойчивое состояние при больших рассогласованиях по отдельным параметрам, так как она компенсирует только отклонение между рассогласованиями. Это уменьшает точность работы системы.
Цель изобретения - повышение точности системы.
Поставленная цель достигается тем, что в каждом канале управления второй выход -измерителя рассогласования соединен со вторым входом формирователя сигнала управления, второй выход блока задания регулируемого параметра соединен с третьими входами формирователей сигнала управления всех каналов управления, а второй выход измерителя рассогласования п-го канала соединен с четвертыми входами формирователей сигнлов управления других каналов.
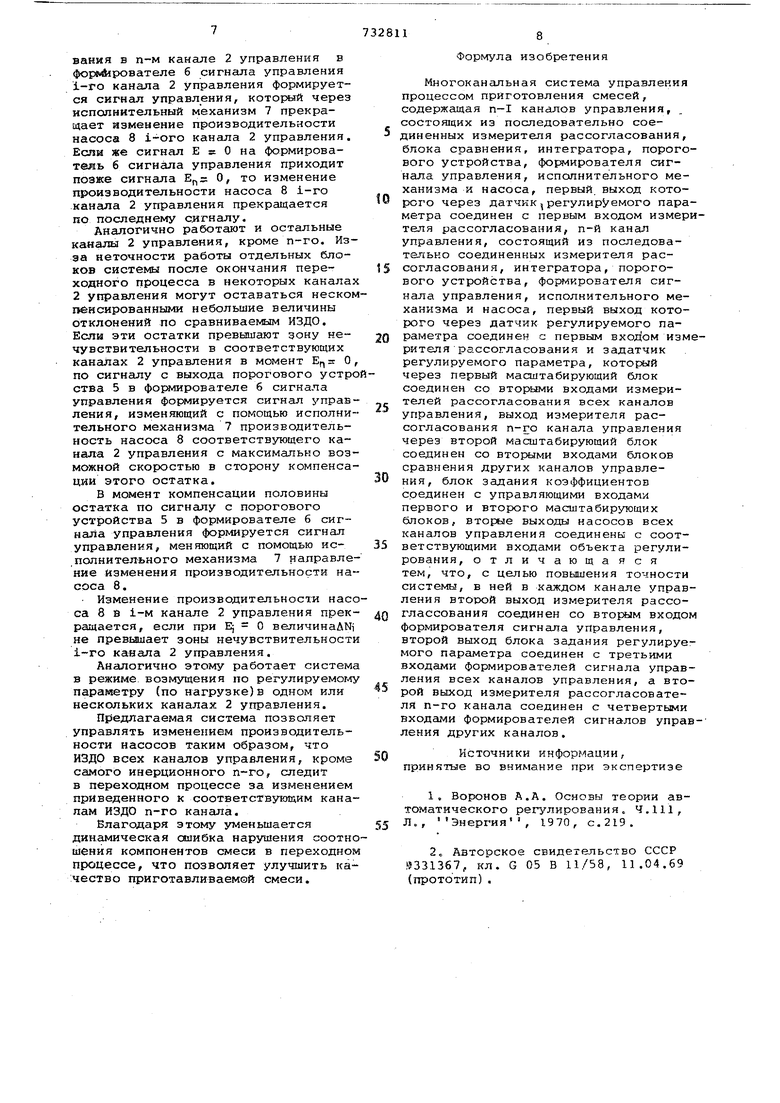
На чертеже приведена блок-схема устройства.
Система включает объект 1 управления, каналы 2 управления, измерители 3 рассогласования, интегратор 4, пороговые устройства 5, формирователи 6 сигнала управления, исполнительные механизг«1ы 7, насосы (агрегаты) 8, датчики 9 регулируемого параметра, блоки 10 сравнения, задатчик 11 регулируемого параметра мастабирующие блоки 12 и 13, блок 14 задания коэффициентов, нуль-органы 15, Х-сигнал задания системы, Xi-Xti-сигналы задания для каналов управления, У - ij)-регулируемые параметры, Щ - Ef(-сигналы рассогласования, К( - Кп-коэффициенты масштабирования, Б1дпДХ-сигнал изменения задания системы, ДЕ - -f сигналы отклонения рассогласования соответсвующего канала управления от приведного рассогласования п-го канала, N,интегральное значение динамической
о 11Ибки п-го канала, нечувств тельности порогового устройства п-го канала, Д N -ДМ -интегральные значения отклонений, Nn -зону реакции пороговых устройств в п-1 каналах, U) Un - управляющие сигналы, Q( - Qn-дозируемые компоненты, Q смесь компонентов.
В п-канале управления соединены последовательно измеритель 3 рассогласования, интегратор 4, пороговое устройство 5, формирователь 6 сигнала управления, исполнительный механизм 7, насос (агрегат) 8, первый выход которого через датчик 9 регулируемого параметра соединен с первым входом измерителя рассогласования .
В остальных п-1 кангшах управления между измерителем 3 рассогласования и интегратором 4 дополнительно включен блок 10 сравнения, второй вход которого подключен через масштабирующий блок 13 к первому выходу 1 змерителя 13 рассогласования п-го канала.
Задатчик 11 регулируемого параметра через масштабирующий блок 12 подключен ко вторым входам измерителей рассогласования во всех каналах управления. Выход блока 14 задания коэффициентов соединен с управляющими входами масштабирующих блоков 12 и 13. Вторые выходы FiacocoB 8 всех каналов соедялсиы с соответствующими входами объекта 1 регулирования.Во всех каналах управления второй выход измерителя 3 рассогласования соединен со вторым входом формирователя 6 сигнала управления, причем второй выход измерителя 3 рассогласования п-го канала соединен с четвертыми входами формирователей ,6 сигнала управления остальных каналов. Второй выход задатчика 11 регулируемого параметра соединен с третьими входами формирователей 6 сигнала управления всех каналов.
Система предназначена для управления производительностями п объемных (дозировочных) насосов или агрегатов, которые непрерывно дозируют в объект 1 (общий трубопровод) компоненты QI - QP .
Система работает следующим образом.
Производительность каждого насоса 8 (агрегата) линейно зависит от скорости вращения привода, которая меняется исполнительными механизмами 7 в зависимости от сигналов управления Uj , поступающих с выходов соответствующих формирователей 6 сигналов управления. Заданное регламентом состояние между производительностями устанавливается масштабирующим блоком 12, в котором сигнал зарцания X от блока 14 задания умножается на соответствующие масштабирую цие коэффициенты К - Ки . В измерителях 3 рассогласования всех канало 2 управления непрерывно определяютс текущие рассогласования Е| - X; - Y; между сигналом задания для соответствующего канала и сигналом регулируемого параметра, получаемого на выходе датчика 9. При изменении общего задания X по сигналу SignAX формируемому на вторюм выходе блока 14 задания и поступающему на формирователи б сигнала управления, кана лы управления переводятся на режим возмущение по заданию работы На выходах измерителей 3 рассогла сования формируются текущие рассогла сования Е; . В самом инерционном п-м канале 2 управления сигнал рассогласования ЕП интегрируется в интеграторе 4, на выходе которого непрерывно образуется текущее интегральное значение динамической ошибки (ИЗДО) п-го канала 2 управления dt Эту величину сравнивают в пороговом устройстве 5 п-го канала с задан ной зоной нечувствительности по ИЗДО При превышении этой зоны нечувствительности на выходе нуль-органа 15 формируется сигнал в момент А N, N - N; о По этому сигналу в формирователе б сигналг, управления формируется управляющий сигнал UK, который через исполнительный механизм 7 изменяет производительность УП наcoca 8 с максимально возможной скоростью в сторону уменьшения рассогла сования ЕП . Для сравнения ИЗДО всех канаЛов управления с ИЗДО п-го канала 2 управления сигнал рассогласования Е„п-го канала 2 управления умножают в масштабирующем блоке 13 на коэффициенты к KVi I )торые вводятся в масштабирующий блок 13 из блока 14 задания коэффициентов. Выходные сигналы i3- In масштабирующего блока 13 сравнивают в блоке 10 сравнения с рассогласованиями Е) - Е„., соответствующих каналов 2 управления. Сигналы отклонений Д Е, - Л Ef,., интегрируются в интеграторах 4. На выходе интегратора 4 в i-ом канале 2 управления образуется сигнал отклонения ИЗДО соответствующего канала 2 упра ления от приведенного к этому канал ИЗДО п-го канала 2 управления &щ J (Ei -If-) dt Эти сигналы сравнивают в пороговых устройствах 5 сзаданной для каждого канала зоной реакции N, , величина которой определяется допус тимой величиной ошибки по нарушению соотношения между смешиваемыми компонентами, а также с нулевым уровнем При достижении отклоЕ{еяия по ИЗДО заданных зон реакции на выходе нульоргана 15 в соответствующем канале 2 управления появляется сигнал, по которому в формирователе б сигнала управления формируется сигнал управления, который через исполнительный механизм 7 дзменяет производительность соответствующего насоса 8 с максимально возможной скоростью в сторону компенсации рассогласования. При этом ИЗДО соответствующего канала 2 управления сначала презышает приведенное ИЗДО п-го канала 2 управления, а после того, как сравниваеvbie сигналы производительности соответствующего в привешенного п-каналов 2 управления сравниваиотся по величине, начинает приближаться к нему. Когда отклонение по ИЗДО ста.нет равно нулк Л Nj О, на выходе порогового устройства 5 появляется сигнал, по которому в формирователе 6 сигнала управления формируется сигнал Управления, меняющий направление изменения производительности соответствующего насоса 8 на обратное, т.е. реверсирующий исполнительный механизм 7 . Производительность 1-го насоса 8 начинает уменьшаться, сначала сравниваясь по величине с сигналом приведенной производительности насоса 8 п-го канала 2 управления, а затем становится меньше его. Соответственно ИЗДО i-ro канала 2 управления сначала отклоняется от приведенного ИЗДО п-го канала 2 управления, а после момента совпадения по величине сигналов производительности насосов 8 i-ro и приведенного п-каналов 2 управления, начинает снова приближаться к нему. В момент ДЫ( О, в формирователе б сигнала управления формируется управляющий сигнал, который снова реверсирует исполнительный механизм 7, меняющий направление изменения производительности насоса i-ro канала 2 уп15авления на обратное. Аналогично работает i-й канал 2 управления и дальше, каждый раз меняя направление изменения производительности в момент компенсации отклонения по ИЗДО. В моменты компенсации рассогласования EJ О на втором выходе измерителя 3 рассогласования формируется сигнал, поступающий на вход формирователя 6 сигнгипа управления. Если компенсация рассогласования EJ в i-M канале 2 управления происходит раньше компенсации рассогласования п-м- канале 2 управления, то по сигналу Ef, f с выхода измерителя 3 рассогласования в п-м канале 2 управления в фОЕ |41рователе б сигнала управления i-ro канала 2 управления формируется сигнал управления, через исполнительный механизм 7 прекращает изменение производительности насоса 8 i-oro канала 2 управления. Если же сигнсш Е s О на формирователь б сигнала управления приходит позже сигнала Ер,: О, то изменение производительности насоса 8 i-ro канала 2 управления прекращается по последнему сигналу.
Аналогично работают и остальные каналы 2 управления, кроме п-го. Изза неточности работы отдельных блоков систе№л после окончания переходного процесса в некоторых каналах 2 управления могут оставаться нескомиёнсированными небольшие величины отклонений по сравниваемым ИЗДО. Если эти остатки превышают зону нечувствительности в соответствующих каналах 2 управления в момент Е, О, по сигналу с выхода порогового устроства 5 в фогяиирователе б сигнала управления формируется сигнал управления, изменяющий с помощью исполнительного механизма 7 производительность насоса 8 соответствующего канала 2 управления с максимально возможной скоростью в сторону компенсации этого остатка.
В момент компенсации половины остатка по сигналу с порогового устройства 5 в формирователе б сигнала управления формируется сигнал управления, меняющий с помощью исполнительного механизма 7 направление Изменения производительности насоса 8.
Изменение производительности насоса 8 В i-M канапе 2 управления прекращается, если при Ej О вeличинaANi не превышает зоны нечувствительности 1-го канала 2 управления.
Аналогично этому работает система в режиме возмущения по регулируемому параметру (по нагрузке)в одном или нескольких каналах 2 управления.
Предлагаемая система позволяет управлять изменением производительности насосов таким образом, что ИЗДО всех каналов управления, кроме самого инерционного п-го, следит в переходном процессе за изменением приведенного к соответствующим каналам ЙЗДО п-го канала.
Благодаря этому уменьшается динамическая ошибка нарушения соотношения компонентов смеси в переходном процессе, что позволяет улучшить качество приготавливаемой смеси.
Формула изобретения
Многоканальная система управления процессом приготовления смесей, содержащая п-I каналов управления, состошцих из последовательно соединенных измерителя рассогласования, блока сравнения, интегратора, порогового устройства, формирователя сигнала управления, исполнительного механизма и насоса, первый, выход которого через датчик,регулируемого параметра соединен с первым входом измертеля рассогласования, п-й канал управления, состоящий из последоваTSTibHo соединенных измерителя рассогласования, интегратора, порогового устройства, формирователя сигнала управления, исполнительного механизма и насоса, первый выход которого через датчик регулируемого параметра соединен с первым входом измрителя рассогласования и задатчик регулируемого параметра, который через первый масштабирующий блок соединен со вторыми входами измерителей рассогласования всех каналов управления, выход измерителя рассогласования п-го канала управления через второй масштабирующий блок соединен со вторыми входами блоков сравнения других каналов управления, блок задания коэффициентов соединен с управляющими входами первого и второго масштабирующих блоков, вторые выходы насосов всех каналов управления соединены с соответствующими входами объекта регулирования, отличающаяся тем, что, с целью повышения точности системы, в ней в каждом канале управления второй выход измерителя рассоглассования соединен со вторым входо формирователя сигнала управления, второй выход блока задания регулируемого параметра соединен с третьими входами формирователей сигнала управления всех каналов управления, а второй выход измерителя рассогласователЯ п-го канала соединен с четвертыми входами формирователей сигналов упраления других каналов.
Источники информации, принятые во внимание при экспертизе
1,Воронов А.А. Основы теории автоматического регулирования, Ч.111, Л., Энергия, 1970, с.219.
2,Авторское свидетельство СССР №33.1367, кл. G 05 В 11/58, 11.04.69 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сопряженными по нагрузке дозировочными агрегатами | 1974 |
|
SU637792A1 |
| Многоканальная система управления процессом приготовления смесей | 1973 |
|
SU495647A1 |
| Многоканальный регулятор | 1987 |
|
SU1464137A1 |
| Двухканальная система управления | 1985 |
|
SU1269093A1 |
| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| Импульсная следящая система | 1986 |
|
SU1746359A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Многоканальный регулятор | 1983 |
|
SU1161915A1 |

