Предлагаемый способ .предназначен для автоматического управления производительностью насосов.
Известные способы управления производительностью насоса, имеющего линейную зависимость производительности от числа оборотов привода, обладают невысокой точностью.
Предложенный способ отличается от известных те-м, что при нем нелрерывно измеряют сигнал рассогласования и его интегральное значение, фиксируют интегральное значение сигнала рассогласования в момент равенства сигнала рассогласования нулю и изменяют направление исполнительного механизма в момент достижения текущим интегральным значением сигнала рассогласова«ия половины зафиксированной ранее величины.
Это обеспечивает повышение точности дозирования насосом среднего за время переходного процесса значения заданного количества продукта при сокращении времени переходного процесса.
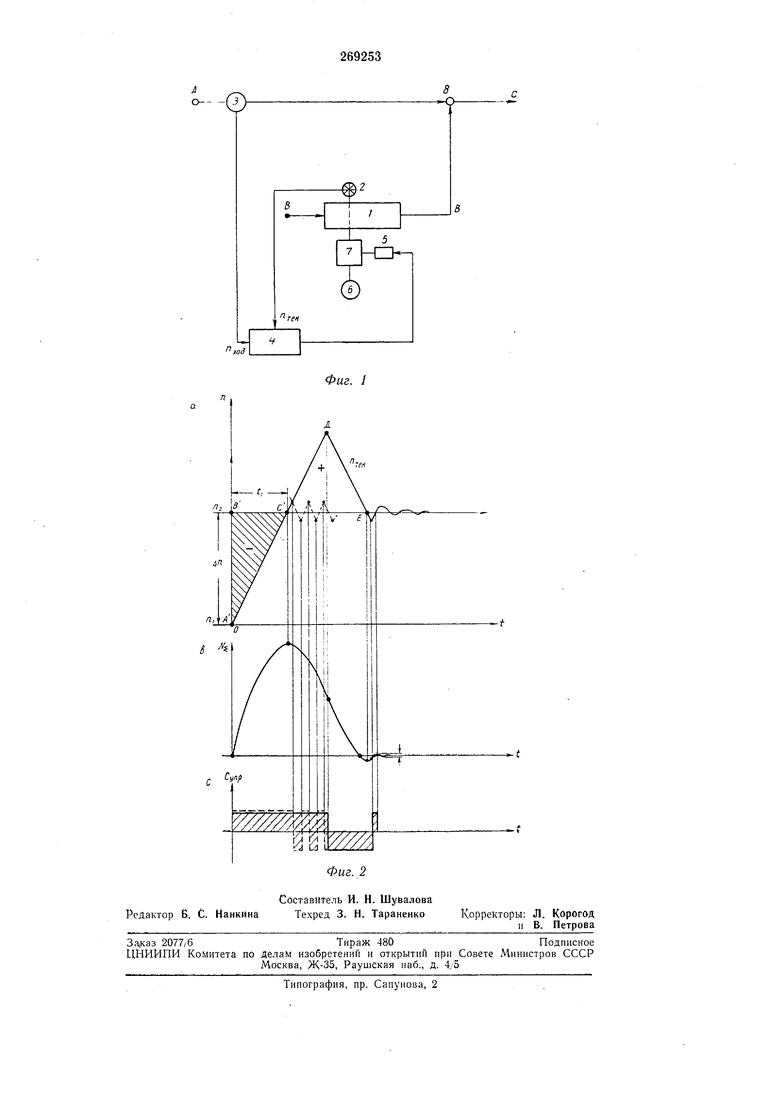
На фиг. 1 Представлена блок-схема системы, реализующей описываемый способ. . Способ заключается в следующем.
Непрерывное дозирование производится с по-мощью дозировочиого агрегата / нродукта В, ;который смешивается с основным продуктом А. Для поддержания заданного качества нродукта смещения С соотношение А : В
должно быть стабильным в различных режимах. В системе производится непрерывное слежение производительности агрегата /, измеряемое датчиком 2 (как правило, датчиком
числа оборотов), за изменением расхода оеновного продукта, измеряемого датчиком 3.
Сигнал с датчика 3 «зад в качестве задания поступает в управляющее устройство 4. В нем сигнал Пзад непрерывно сравнивается с сигналом Лтек от датчика 2. Выходной сигнал управления Супр поступает на исполнительный механизм 5 (двигатель 6 с постояиной скоростью), воздействующий на регулирующий орган 7 (например, вариатор), с помощью которого меняется производительность дозировочного агрегата.
На фиг. 2, а изображен нереходный (процесс управления производительностью агрегата при измепении задания Пзад. Для упрощения
принято, что регулирующий орган 7 имеет линейеую характеристику, а блоки 5 и 7 не имеют люфтов и малоинерционны.
При иЗМенении производительности продукта А сигнал зад меняет свое значение от п
до п- (фиг. 2, а).
При превышении зоны нечувствительности по интегральному значению сигнала рассогласования на исполннтельный механизм поступает сигнал, запускающий его с максипенсации .рассогласования. В точке Ci наступает комоенсация этого рассогласования. Однако за время ti дозировочный агрегат недодает -продукта В на величину, характеризуемую треугольником А В С . Эту величину мы называем интегральным значением ди.намической ошибки сигнала |рассогласоБания за в.ремя t-i. Под интегральным значением динамической ошибки понимается интеграл вида
со
/ I , Представляющий собой алгебраическую (с учетом анаков) сумму плош,адей, ограниченную кривой переходного процесса n-suK. (t И линией нового заданного состояния равновесия п, относительно которой отдельные площади суммируются с разными знаками.
Наличие динамической ощибки за время i приводит iK нарушению 1соотнощения А : В между смешиваемьши продуктами, что приводит к резкому ухудшению качества продукта С.
Трубопровод или реактор, расположенные после точки смешения 8, обладают выравнивающи1ми 1способностя1ми. Поэтому, если за короткое время лосле компенсации рассогласо1вания значение ошибки будет скомненсировано путем перерегулирования пара;метра на величи ну, зависящую от ошибки, то соотношение А : В не будет нарушено.
Суть способа заключается в том, что в первую очередь решается задача компенсации интегрального значения динамической ошибки путем перерегулирования параметра. Момент переключения движения механизма 5 происходит в точке Д, когда списана половина оШИбки. В момент совпадения текущего пара.метра «тек с задан1ны.м Идад (и точке ) в идеальных условиях должна быть осуществлена полная компенсация ощибки. Однако из-за люфтов и инерционности блоков 5 и 7 в точке Е может оставаться некоторая нескомпенсированная -величина ощибки, которая компенсируется за следующий цикл переключений. Такое движение механизма 5 обеспечивает минимальное время компенсации ошибки и не приводит к нарушению соотношения смешиваемых продуктов и ухудшению качества конечного продукта, что имеет место при применепии, например, релейной системы.
Кроме того, поддержание регулируемого параметра в зоне нечувствительности по интегральному значению динамической ош1ибки нозволяет увеличить статическую точность системы, так как легко добиться почти полной компенсации интегрального значения динамической ошибки за несколько циклов. На фиг. 2,8 показано изменение во времени интегрального значения динамической ошибки переходного процесса.
На фиг. 2, с показаны сигналы управления для предложенного способа и релейного (показано пунктиром).
Как видно из графика на фиг. 2, с, механизм 5 при релейном законе совершает колебательное движение после компенсации рассогласования, а по предложенному способу после прихода в зону нечувствительности исполнительный механизм останавливается.
Предмет изобретения
Способ управления производительностью
насоса, имеющего линейную зависимость производительности от числа оборотов привода, отличающийся тем, что, с целью повышения точности дозирования насосом среднего за время переходного процесса значения заданного количества продукта при сокращении времени .переходного процесса, непрерывно измеряют сигнал рассогласования и его интегральное значение, фиксируют интегральное значение сигнала рассогласования в момент
равенства сигнала рассогласования нулю и изменяют направление движения исполнительного механизма в лшмент достижения текущим интегральным значением сигнала рассогласования половины зафиксированной ранее величины.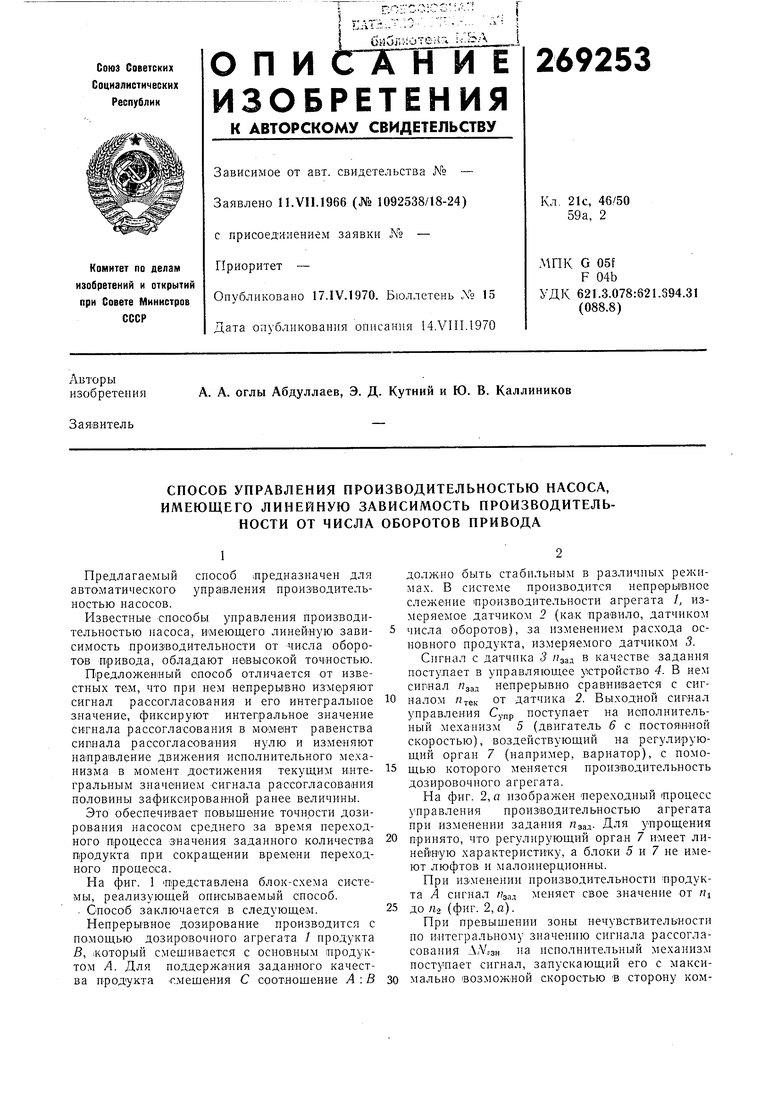
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-ИМПУЛЬСНОЕ УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ ДОЗИРОВОЧНОГО АГРЕГАТА | 1970 |
|
SU276209A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ НАСОСА-ДОЗАТОРА | 1973 |
|
SU399625A1 |
| Устройство для управления сопряженными по нагрузке дозировочными агрегатами | 1974 |
|
SU637792A1 |
| Многоканальная система управления процессом приготовления смесей | 1973 |
|
SU495647A1 |
| Многоканальная система управления процессом приготовления смесей | 1974 |
|
SU732811A1 |
| АДАПТИВНЫЙ ИМПУЛЬСНЫЙ ПРОПОРЦИОНАЛЬНС ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОРп<?п**;,.«, | 1972 |
|
SU432459A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| РЕГУЛЯТОР ДЛЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU370584A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| НЕЛИНЕЙНЫЙ РЕГУЛЯТОР | 1965 |
|
SU176969A1 |