1
Известен способ управления производительностью насоса-дозатора, обеснечивающий компенсацию интегрального значения динамической ошибки.
ПрелТ,ложенный способ отличается от известного тем, что для компенсации динамической ошибки исполнительный механизм выдерживают в заданном положении в течение расчетного промежутка времени, благодаря чему расширяется диапазон регулирования подачи насоса-дозатора.
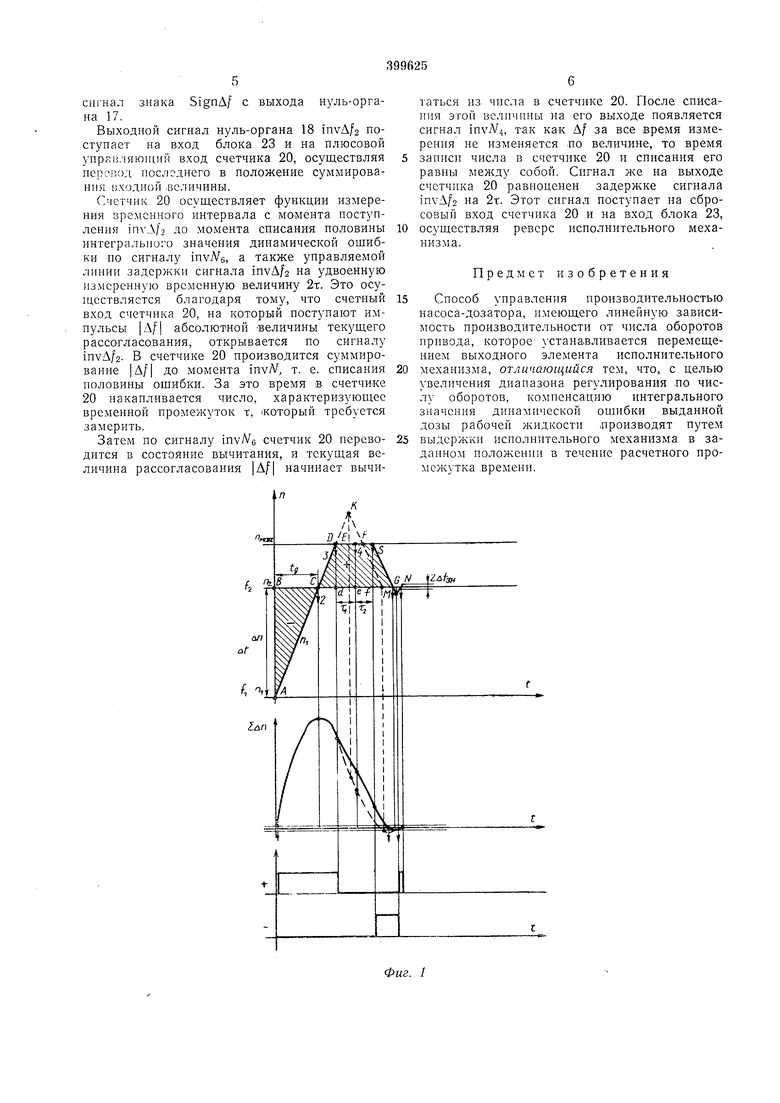
На фиг. 1 локазан переходный процесс s системе и изменение во времени интегрального значения динамической ошибки; переходный процесс в управляемом вычитаюил,ем счетчике, и изменение во времени сигна.тов управления «а выходе блока выбора команд управления; на фиг. 2 и 3 приведена блоксхема устройства, реализующего предложенный способ.
Пусть заданная величина изменилась о «i до П2 (см. фиг. 1).
При нревышении зоны нечувствительности по сигналу ошибки (ЕД/г)зн на исполнительный механизм поступает сигнал, запускающий его с максимально возможной скоростью в сторону компенсации возникшего рассогласования, которая Происходит в точке С. За время переходного процесса /д насос недодает продукт на величину, характеризуемую
площадью треугольника ABC, которая равна SAIIC - А/г/д. Для компенсации этой величины исполнительный механизм должен был бы продолжать свое движение в направлении нерерсгулнроваипя до точки /(, в которой произошло бы списание половины накоп.1енHoii ощпбки, а затем реверсироваться и продолжать свое движение до момента комненсации рассогласования текущего параметра в точке М.
Однако, если система работает в области, близкой к граничным значениям, регулирующий орган не может обеспечить необходимой величины перерегулирования, так как раньше достигнет Kpaihiero иоложения. В связи с этим исполнптельный механпзм не может достигнуть точки /(, так как ранее в точке D, достигает граничного положения Пмакс, соответствующего крайнему положению регулирующего органа. Для компенсации ошибки исполнительный механизм должен оставаться в крайнем положении на оиределенное вредгя, а затем реверсироваться.
Тогда текуидий параметр Пг будет изменяться по контуру равнобедренной трапеции CDFG, площадь которой должна быть равна площадп треугольника ABC. Прн достиженпи Kpainiero положения в точке D будет скомпенспровапа часть ошибки, оиределяемая илощадью треугольника CDd. Затем исполнительный механизм выдерживают в этом положении некоторое время г, за которое компенсируется в точке Е половила ошибки, определяемая илошадыо чстгярсхугольиика CbEe. Для полной компенсации оипибки исполнительный механизм выдерживают с-п,е на такое же время т до точки F, а зател осуществляют его реверс. Тогда плон1адь четырс)хугольника EFGe будет равна че|тырехугольннка CDl:.e и полоншю он1пбки, Следовательно, за время CCj TeKynuiii иара.мфтр опишет коптур трапеипп CDrG нлопи ;;,. KdTOpoft соответствует екомиснсировглик) иолйчнне ошибки.
Таким образом, в момент достнжепия текушим параметром п.,. значения , еоотВ(зтствующего крайнему положению регулирующего органа, получают сигнал, останавлпвфощий иснолпительпый лгеханизм. ОдиоврсМФ.ННО начинают измерять временной интервал т до момента компенсаппп иплог;нпы ошибки. Задерживают пеиолннтельнып механизм в крайнем ноложепнн н.а удиоеииую величину измеренного временн--2г, а реверсируют его.
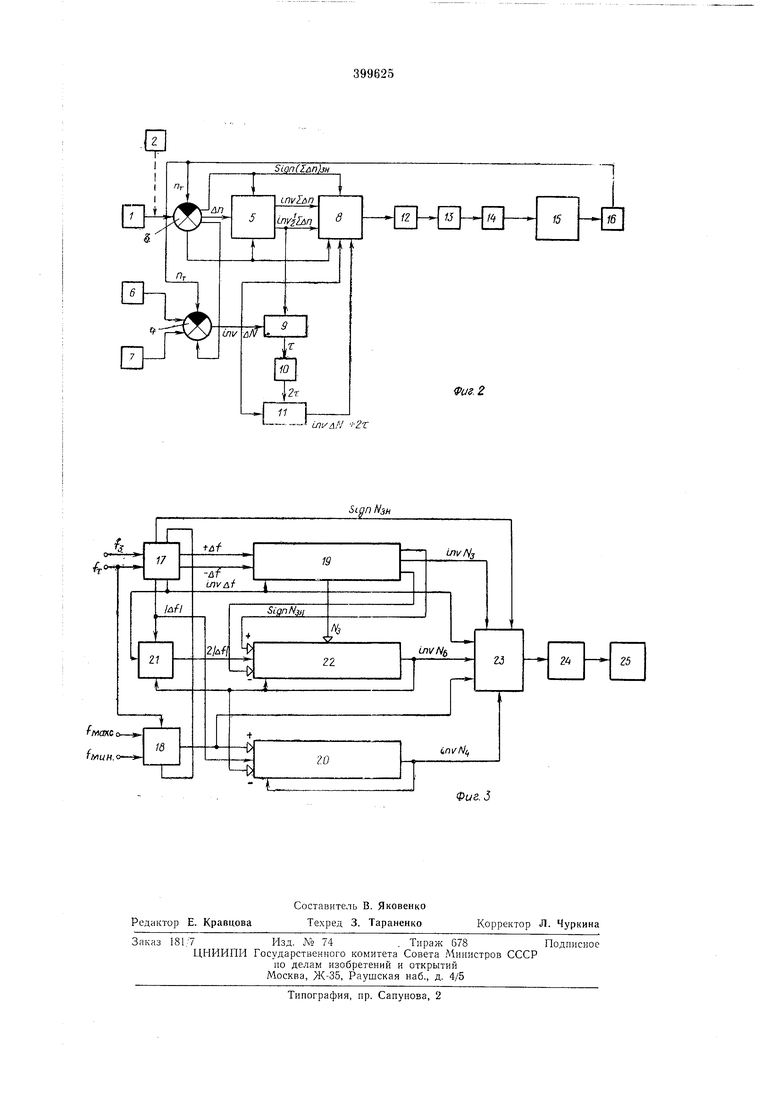
;Онисанный снособ может быть реализован )и помощи системы, состояп.,ей из задатчика 1 (см. фиг. 2), датчика задаюпхего параметра 2 (в случае следящей системы), сравнивающих устройств 3 и 4, сумматора 5, задатчиков крайних положений 6 и 7, блока команд 8, измерителя временных интервалов 9, блока умножения 10, управляемой липни задержки И, усилителя мощности 12, исполнительного механизма 13, регулирующего органа 14, выходной элемент которого воздействует на объект управления ii, н датчика текущего значения подачи пасоса 16.
Устройство может быть выполнено частотно-имнульсным на типовых логическнх элементах нромыщленной автоматики, папри:.ер на субблоках «Спектр. В этом случае значения параметра п преобразуются в соответствующие значения частоты / (см. фиг. i), а счетно-решающая и управляющая часть устройства может быть ыно,:пеиа но схеме, ноказанной на фиг. 3.
Это устройство состоит из цифровых пульорганов 17 и 18, управляемых реверсивных счетчиков 19 и 20, управляемого умножителя 21 частоты, управляемого выч1гга оп1его счетчика 22, блока 23 комапд, блока 24 улразлеиия, исполнительного MexaniBivia 25.
При работе устройства па вход нифрового нуль-органа 1 ненрерывно поступают сигналы заданной /з и текущей fi- велич1П ы г частотно-импульсном кОлТе. Сигнал /з мож.от поступать от цифрового задатчика частоты пли от датчика задающего параметра (ие показаг;ы). Сигнал т поступает от датчика числп оборотов привода насоса. В ну/1ь-орг.нс: i осущес:вляются операции сравнения входных сигналов, определеиня величины Af и знака SignAj рассогласования, момента совпадеппя сраг.11пвае-мьг сгпчи-лов invA/, дн)1е1Г1а и знака п 1е Ы1неппя зоны неч вств1ггельноети но зпачеппю оншбки .V;,,,.
Выходы знака рассогласовання SignAf подк.чючещ-) ко дон1)Л1игтельНЭго нпфровоIo . 18. Вг.1ходы сигнала со знаком нревыгнения зоны нечувствнтельпостп но сигналу онпгбкн SigTLV;,,, подк;11Очены ко входу блока 23. Выходы -|-А/ и -А/ вел11чины сигнала 5ассог,асова1П1я с учетом знака подключепь к )1м вхо;1,ам счетчпка 19. Выход iiiv.A/ 11О,чкл10чон к уп|1а15;1яюн1е.му 15ходу счетчнч;; 19. ос чцесГ1 ля1оп1ем опрос н нерезаннсь. И11тегра.льного знр.чепня динамической ()нибк;( Л:, Гз сче:чика 19 и счетчик 22, а также к вхо;.ам блока 23 и умножлггеля 21, заfl подключен ко
1У 15 ниде параллельного кода нереннсыиается is счетчик 22 но выходу А .-;. Знак 15(тнч11;п А:; перед.ается с выхода счетчика 19, на вход счетчика 22 но выходам SignA.-,, определяющим н;1:рявлепие списания числа из счетчика 22. При сгпгсаппп величины Аз по выходу iiivA:. сигнал 1остунает на вход блока 23. Счетчик 22 осуществляет заниеь интегрального зпачепия дипад1ической ошибки и списапне его удвоенной величиной рассогласования 2iAf . Запись он1ибки Аз в счетчике 22 пропсходит в момент iiivAf в виде параллельного кода. Спиеапие А .-, из счетчика 22 осуп.1,естг;ляется путем подачи па счетный вход от умножителя 2 величины
2|А/
В момент снпсания величиной 2 .1/ ошибки из счетчика 22 па его выходе появляется снгиал invA. Этим сигналов, закрывается вход умножителя 21 п переключается счетчик 22 со сложения па вычитание. ААьножитель 21 осуп1,сствляйт у.гн()жение на две абсолютного значения |1с.:1ичинь рассог;1асованпя в виде частот 1о-ИлП1 Л :СНого кода. Он открывается но сигналу invA/ ;; закр)лв;1ется по сигналу .
На входы допсЛпнтсльного jUKJjpOBoro нульоргана 18 поступают спгна.лы текун1,его параметра /т и /м.игс, /M;:ii, соответст15уюн1,ие гра П1чным зпаче 1ням :)е1улирую1цего органа. Величины /-,ии;и и «1:11 могут быть в виде частотно-импульсного кода или s виде параллельных кодов, - пропорциональных частотам пли периодам текущего параметра 5 крайних ноло;Ке1П1ях регулиру)ощего орга8 осу.Нлествляется ер а внена. В нуль-органе
пне /т с ма::с ИЛИ
, с выдачей на выходе
сигнала совпадения
сравниваемых величин -
hivA/ v. Управляет pa6oToii пуль-органа 18
сигнал знака SignAf с выхода нуль-органа 17.
Выходной сигнал нуль-органа 18 invAfa поступает на вход блока 23 и на плюсовой упраиляющий вход счетчика 20, осуществляя перопол последнего в положение суммирования входной .величины.
Счетчнк 20 осуществляет функции измерения временного интервала с момента поступления до момента списания половины интегрального значения динамической ошибки но сигналу , а также управляемой линии задержки сигнала invAf2 на удвоенную измеренную временную величину 2г. Это осуществляется благодаря тому, что счетный вход счетчика 20, на который поступают импульсы |Д/| абсолютной величины текущего рассогласования, открывается по сигналу invAfa- В счетчике 20 производится суммирование |Д/| до момента invN, т. е. списания ноловины ощибки. За это время в счетчи-ке 20 накапливается число, характеризующее временной промежуток t, «оторый требуется замерить.
Затем по сигналу счетчик 20 переводится в состояние вычитания, и текущая величина рассогласования |А/| начинает вычи6
таться из числа в счетчике 20. После списания этой величины на его выходе появляется сигнал inv/V4, так как Д/ за все время измерения не изменяется по величине, то время записи числа в счетчике 20 и списания его равны между собой. Сигнал же на выходе счетчика 20 равноценен задержке сигнала invДf2 на 2т. Этот сигнал поступает на сбросовый вход счетчика 20 и на вход блока 23, осуществляя реверс исполнительного механизма.
Предмет изобретения
Способ уиравления производительностью насоса-дозатора, имеющего линейную зависимость производительности от числа оборотов привода, которое устанавливается перемещением выходного элемента исполнительного механизма, отличающийся тем, что, с целью увеличения диапазона регулирования .по числу оборотов, компенсацию интегрального значения динамической ошибки выданной дозы рабочей жидкости .производят путем выдержки исполнительного механизма в заданном положенпи в течение расчетного промежутка времени.
&.дпНзн
