статков. В структуре известной системы не используется информация о динамических свойствах дозировочных агрегатов (насосов), которые, как правило, становится известными на стадии исследования объектов управления. При изменении задания в системе все исполнительные мсханизмьт одновременно запускаются и компенсация рассогласованнй но унравляемому параметру в разных каналах управления из-за разных скоростей изменения управляемого параметра п)оисходит в разное время. Причем разнипа во времени компенсации может быть очень большая. Так как для начала отработок раесогласованпй в соотношепиях между ИЗДО в разных каналах управления необходимо знать величину ОИЗДО, которая определяется величиной ИЗДО в д-м канале управления с минимальной скоростью изменения управ; яемого параметра, то все псполнительные механизмы останавливаются и ожидают момента компенсации рассогласования по п-му параметру. Только после этого определяются величины отработок для каждого канала управления и нснолнительпые механизмы запускаются в сторону компенсации этих величии. В результате этото время переходного процесса и нарушения соотношения между смешиваемыми компонентами увеличиваются, что ухудшает качество приготавливаемого нродукта. Кроме того, в известной системе для отработки больших рассогласований в соотношениях между ИЗДО в разных каналах управления необходимы большой величины перерегулирования, что ограничивает диапазон работы устройства, т. к. в областях, близких к граничным положениям регулирующего органа, возможны режимы с работой на упор (насып1,епие), что нарушает оптимальность протекания процесса компенсации величины отработки.
Целью изобретения является улучшение качества управления.
Улучшение качества нриготовляемой смеси достигается благодаря тому, что предлагаемая система содержит блок задержек, выполненный из последовательно соединенных устройства задания коэффициентов, многоканального умножителя и многоканального преобразователя «код-временной интервал, и в каждом канале, кроме п-го, соединенные последовательно переключающее устройство и устройство подавления совпадающих импульсов, выходы которого связаны со счетными входами реверсивного счетчика, первые входы переключающего устройства соединены с выходами цифрового нуль-органа, вторые входы через блок сопряжения - с выходами цифрового нуль-органа п-то канала, а управляющие входы - с выходом логического устройства, запускающий вход многокапальпого умножителя блока задержек подключен к ВЫХОДУ блока выбора режима, другие входы - к выходам цифровых нуль-органов всех каналов, а выходы. многоканального преобразователя «код-временной интервал соединены со входами всех логических устройств, кроме л-го канала, цифровой нуль-орган в котором связан со входами всех логических устройств.
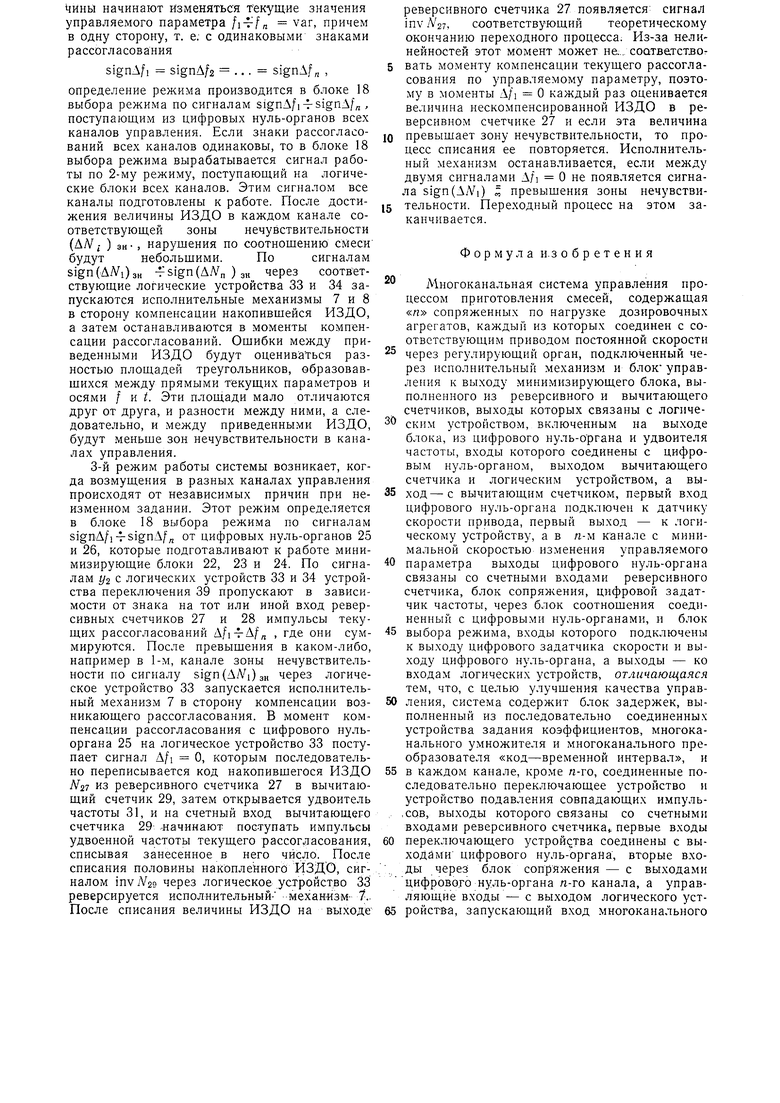
На чертеже изображена функциональная схема системы, в состав которой входят: дозировочные агрегаты I и 2 (соответственно для 1-го II п-го каналов унравления); приводы 3 и 4 ностоянной скорости, регулирующие органы 5 и 6, исполнительные механизмы 7 и 8, датчики cKopocTi 9 и 10, блоки уиравления 11 и 12. Аналогичное оборудование применяется для всех каналов (13 - для л-го канала). Система содержит также общие блоки: цифровой задатчик частоты 14, блок соотношения 15, состоящий из блока коэффициентов 16 и лтногоканального умножителя 17, а также блок 18 выбора режима и блок сопряжения 19, который содержит устройство коэффициентов 20 и многоканальный умножитель 21. Кроме того, в каждый канал унравления входят минимизирующие блоки 22, 23 и 24, содержащие цифровые нуль-органы 25 и 26, реверсивные счетчики 27 и 28, вычитающие счетчики 29 и 30, удвоители чаетоты 31 и 32, логические устройства 33 и 34.
Кроме того, система включает в себя блок задержек 35, содержащий устройство 36 задания коэффициентов, многоканальный умножитель 37 и многоканальный преобразователь «код-временной интервал 38, а во все минимизирующие блоки, кроме п-го (24), введены переключающие устройства 39 и устройства 40 подавления совпадающих импульсов. Принцип действия системы состоит в следующем.
При изменении общего для систем зада1ГИЯ впачале с максимально возможной скоростью занускается исполнительный механизм изменения числа оборотов агрегата (и липейно связанной с ними производительности) п /г-м канале управления с наименьшей скоростью изменения управляемого параметра. Все остальные исполнительные механизмы системы запускаются с временными задержками, определяемыми как произведение величины изменения задания на постоянные коэффициенты, равные полуразности величин, обратных скоростям изменения управляемых параметров /1-го и соответствующего каналов управления, по зависимости
1/
B;Aff ,
2ltga«
tg«i У
; - tefOn„, ,
где Bf - постоянный коэффи2tgat -tgctrt
циент для 1-го канала; t; - временная задержка запуска t-ro исполнительного механизма; tga - - скорость изменения 1-го управлямого параметра; tga,, - скорость изменения
-го управляемого параметра; Afi - изменение задания в f-м канале управления.
В моменты компенсации рассогласований но управляемым параметрам исполнительные механизмы останавливаются и в момент компенсации рассогласования в п.-м канале управо
ления они запускаются в сторону компенсации оставшейся величины разности между ИЗДО соответствующего и л-го канала управления, измененного с учетом введенного коэффициента маштабирования величины отработки.
Исполнительные механизмы реверсируются после компенсации половины соответствующей величины отработки и останавливаются в моменты компенсации рассогласований по управляемым параметрам, если при этом нескомпенсированная величина отработки не превышает зоны нечувствительности соответствующего канала управления.
Работа системы заключается в следующем.
В блоке задержек 35 определяются моменты формирования сигналов управления, запускающих исполнительные механизмы в различных каналах управления, на основе информации о величине приращения задания A/f -vA/n , получаемой с выходов цифровых нуль-органов 25 и 26, и постоянной информации, выбираемой из устройства 36 задания коэффициентов.
По запускающему сигналу с выхода блока 18 выбора режима в многоканальном умножителе 37 производится умножение поступающих на его вход сигналов, и в.чодной сигнал в виде кода N-, fi;Aff поступает на вход многоканального преобразователя 38, где он преобразуется во временной интервал т,- . Сигнал задержки по окончании интервала времени Т; поступает на вход логического устройства в I-TOM канале управления, который осуществляет задержанный запуск соответствующего исполнительного механизма.
Блоки соотнощения 15 и сопряжения 19 расширяют функциональные возможности системы, позволяя использовать приводы с различной скоростью вращения, что чаще всего бывает необходимо на практике. Эти блоки позволяют масщтабировать задающий сигнал, устанавливая требуемое регламентом соотношение между смещиваемыми компонентами, а также согласовывать сигналы рассогласования в разных каналах управления.
Блок соотношения 15 строится на основе многоканального умножителя 17, на входы которого поступает сигнал /з от цифрового задатчика частоты 14 в частотно-импульсном коде, и постоянные коэффициенты масщтабирования /Ci-f/Cn от блока коэффициентов 16 в параллельном коде. В многоканальном умножителе 17 производится умножение /з на соответствующий коэффициент и с его выходов поступает на соответствующие входы цифровых нуль-органов 25 и 26 всех каналов управления в частотно-импульсном коде в качестве задающих сигналов PI4/п.
Блок сопряжения 19 предназначен для согласования величин рассогласования в различных каналах управления при интегрировании разницы между ними. Это осуществляется путем умножения в многоканальном умножителе 21 сигнала рассогласования в л-м канале
6
управления А/ , поступающего с выхода цифрового нуль-органа 26 в частотно-импульсном коде на коэффициенты, обратные коэффициентам масштабирования ly/Ci-f , ностунающим с устройства коэффициентов 20 в виде параллельного кода. С выхода многоканального умножителя 21 сигналы в виде частотно-импульсного кода поступают на входы переключающих устройств 39 во всех минимизирующих блоках, кроме л-го.
Переключающие устройства предназначены для переключения в зависимости от работы входных сигналов с цифровых нуль-органов соответствующего и л-го каналов, согласованных в блоке сопряжения 19.
Управление работой переключающих устройств 39 осуществляется сигналами с соответствующих логических устройств 33. В устройствах 40 подавления совпадающих импульсов, подключенных па выходе переключающих устройств 39, осуществляется подавление импульсов, пришедших на входы реверсивного счетчика 27 одновременно или разделенных интервалом, меньшим необходимого 5 для нормального переключения триггерной ячейки в счетчике. Эти устройства необходимы, так как в режиме изменения задания на разные входы реверсивного счетчика сигналов от разных источников н при одновременном приходе импульсов на счетные входы в нем
0 могут происходить сбои.
Для системы характерны три режима работы.
1.При установившихся значениях управляемых параметров изменяется задание в сис5теме, т. е.
/i4/ const, /3 var.
2.При постоянном задании под воздействием общего для системы возмущения (из40менение давления, частоты, напряжения, сети) управляемые параметры изменяются в одну сторону, т. е.
/3 const,/,-Ь/„ var,
5
signA/i signA/2 . . . signA/,,
3.При постоянном задании один или несколько управляемых параметров под воздействием различных возмущений изменяются в независимых направлениях т. е.
0
f3 const, sing-Af; signA//+i .
В первом сигнал задания в системе /3, поступающий с цифрового задатчика частоты 14 в виде частотно-импульсного кода, масштабируется в блоке соотношения 15 и в виде сигналов задания f« в частотноимпульсном коде поступает на входы цифровых нуль-органов 25 и 26, где они непрерывно сравниваются с текущими значениями управляемых параметров /i-r-/,, , поступающих на другие входы цифровых нуль-органов 25 и 26, с датчиков скорости 9 и 10 в частотно-импульсном коде. Сравнение этих сигналов производится непрерывно и сигнал рассогласова5 ния на выходе цифровых нуль-органов 25 и 26
появляется в виде частоты сравниваемых сигналов ,(.
При изменении сигнала задания в блоке 18 выбора режима вырабатывается сигнал знака приращения задания и по каналу signAfs поступает на логические устройства 33 и 34 и на многоканальный умножитель 37. По этому сигналу в логическом устройстве 34 п-го канала управления с наименьшей скоростью изменения управляемого параметра вырабатывается сигнал, запускающий через блок управления 12 исполнительный механизм 8, который начинает с максимально возможной скоростью перемещать регулирующий орган 6, в результате чего начинает изменяться скорость вращения привода, а вместе с ней и производительность дозировочного оборудования в сторону компенсации возникщего рассогласования по управляемому параметру А/„ .
Исполнительные механизмы в остальных каналах управления запускаются с задержками Т1-гТп-1 , определяемыми в блоке задержек 35. По сигналу запуска с блока 18 выбора режима в многоканальном умножителе 37 производится умножение величин приращения задания Aff-bA/ -i , получаемых с выходов цифровых нуль-органов 25, на соответствующие постоянные коэффициенты , заданее вычисленные и внесенные в устройство 36 задания коэффициентов. Коды Л 1-т-Лп-1В многоканальном преобразователе 38 преобразуются в соответствуюп 1ие временные интервалы Ti-rTH-i, по окончании которых формируются сигналы, запускающие через логические устройства 33 исполнительные механизмы в соответствующих каналах управления в сторону компенсации рассогласования по управляемым параметрам.
В моменгы компенсации рассогласований по управляемым параметрам в соответствующих цифровых нуль-органах 25 и 26 вырабатываются сигналы, которые по каналам Л/1 - О-гА/п О через логические устройства 33 останавливают соответствующие исполнительные механизмы.
Переходный процесс в системе теоретически должен закончиться в момент компенсации рассогласования по управляемому параметру Д/„ 0 в канале с наименьшей скоростью его изменения. К этому моменту приведенные интегральные значения динамических ошибок всех каналов управления должны быть равны по величине. Однако из-за нелинейностей в элементах системы, инерционности и люфтов в исполнительных механизмах и регулирующих органах, а также неточностей вычислений приведенные ИЗДО в разных каналах управления могут незначительно отличаться друг от друга.
Определение разности между приведенными ИЗДО п-го и соответствующего каналов управления путем суммирования производится в реверсивных счетчиках 27 разницы между рассогласованиями по управляющему параметру соответствующего канала и «-го канала, приведенного к соответствующему каналу с помощью блока сопряжения 19.
При работе в 1-м режиме, например, в 1-м канале управления по сигналу signA/s изменения задапия с логического устройства 33 переключаюпи-1м устройством 39 осуществляется подключение сигналов 1//(|А/„ с блока сопряжения 19 и А/1 с цифрового нуль-органа 25 па разные входы реверсивпого счетчика в зависимости от знаков рассогласований. Устройство 40 подавления совпадающих импульсов подавляет при этом одновременно пришедшие импульсы.
При работе во 2-м и 3-м режимах по сигпалу управления signAf; с логического устройства 33 переключающее устройство 39 подключает только сигналы ±А/,- на тот или иной вход соответствующего реверсивпого счетчика в зависимости от знака рассогласования. При этом реверсивный счетчик работает либо в режиме суммирования, либо в режиме вычитания.
В момент теоретического окончания нереходного процесса по сигналу Af „ 0, поступающему из цифрового нуль-органа 26 на логические устройства 33 и 34, опрашиваются реверсивпые счетчики 27 и 28, и находящиеся в них разности между приведенными ИЗДО п-го и соответствующих каналов ,27 в виде параллельного кода переписываются в вычитающие счетчики 29.
Если эта величина превышает зону нечувствительности в каком-либо, например в 1-м, канале управления, то сигналом по каналу sign(AAi)3H , поступающим от реверсивного счетчика на логическое устройство соответствующего капала управления, разрешается процесс компенсации образовавшейся разности между приведенными ИЗДО. Сигпалом управления t/i, производившим опрос реверсивного счетчика 27, с некоторой задержкой открывается удвоитель частоты 31, на вход которого начинают поступать импульсы текущего рассогласования независимо от знака (.A/i).
В удвоителе частоты 31 производится удвоение частоты и сигнал 2(A/i) в частотноимпульспом коде поступает па счетный вход вычитающего счетчика 29. В зависимости от знака NZ по сигналам sing.V27 от триггера знака в реверсивном счетчике 27 открывается в вычитающем счетчике 29 такой вход, чтобы входные импульсы 2(Afi) списывали находящееся в нем число. В момент списывания из вычитающего счетчика 29 записанного в него числа Л29 удвоенным текущим рассогласованием, что равноценно списанию половины величины разности между приведенными ИЗДО п-го и соответствующего канала, на его выходе появляется сигнал inv.V29, который через логическое устройство 33 реверсирует исполпительный механизм 7. Одновременно этим же сигналом закрывается удвоитель частоты 31 и сбрасывается число в вычитающем счетчике 29.
Во 2-м режиме работы системы, когда при неизменном задании /з const от общей причины начинают изменяться текущие значения управляемого параметра п var, причем в одну сторону, т. е: с одинаковыми знаками рассогласования
signA/i signA/2 ., . signAf „ ,
определение режима производится в блоке 18 выбора режима по сигналам signA/i-r signA/n , поступающим из цифровых нуль-органов всех каналов управления. Если знаки рассогласований всех каналов одинаковы, то в блоке 18 выбора режима вырабатывается сигнал работы по 2-му режиму, поступающий на логические блоки всех каналов. Этим сигналом все каналы подготовлены к работе. После достижения величины ИЗДО в каждом канале соответствующей зоны нечувствительности (АЛ J- ) эн , нарушения по соотнощению смеси будут небольшими. Посигналам
sign()3H -f sign (AyVn ) эк через соответствующие логические устройства 33 и 34 запускаются исполнительные механизмы 7 и 8 в сторону компенсации накопившейся ИЗДО, а затем останавливаются в моменты компенсации рассогласований. Ошибки между приведенными ИЗДО будут оцениваться разностью площадей треугольников, образовавшихся между прямыми текущих параметров и осями f и t. Эти площади мало отличаются друг от друга, и разности между ними, а следовательно, и между приведенными ИЗДО, будут меньше зон нечувствительности в каналах управления.
3-й режим работы системы возникает, когда возмущения в разных каналах управления происходят от независимых причин при неизменном задании. Этот режИм определяется в блоке 18 выбора режима по сигналам signA/i-T-signAf от цифровых нуль-органов 25 и 26, которые подготавливают к работе минимизирующие блоки 22, 23 и 24. По сигналам г/2 с логических устройств 33 и 34 устройства переключения 39 пропускают в зависимости от знака на тот или иной вход реверсивных счетчиков 27 и 28 импульсы текущих рассогласований Afi-rAf , где они суммируются. После превышения в каком-либо, например в 1-м, канале зоны нечувствительности по сигналу sign(AAi)3H через логическое устройство 33 запускается исполнительный механизм 7 в сторону компенсации возникающего рассогласования. В момент компенсации рассогласования с цифрового нульоргана 25 на логическое устройство 33 поступает сигнал А/1 О, которым последовательно переписывается код накопивщегося ИЗДО N27 из реверсивного счетчика 27 в вычитающий счетчик 29, затем открывается удвоитель частоты 31, и на счетный вход вычитающего счетчика 29 -начинают поступать импульсы удвоенной частоты текущего рассогласования, списывая занесенное в него число. После списания половины накопленного ИЗДО, сигналом inv N20 через логическое устройство 33 реверсируется исполнительный- механ-изм- 7.. После списания величины ИЗДО на выходе
реверсивного счетчика 27 появляется сигнал inv N27, соответствующий теоретическому окончанию переходного процесса. Из-за нелинейностей этот момент может не... соатватствот вать моменту компенсации текущего рассогласования по управляемому параметру, поэтому в моменты А/1 О каждый раз оценивается величина нескомпенсированной ИЗДО в реверсивном счетчике 27 и если эта величина
превышает зону нечувствительности, то процесс списания ее повторяется. Исполнительный механизм останавливается, если между двумя сигналами A/i О не появляется сигнала sign(AjVi) S превышения зоны нечувствительности. Переходный процесс на этом заканчивается.
Формула и.зобретения
Многоканальная система управления процессом приготовления смесей, содержащая «п сопряженных по нагрузке дозировочных агрегатов, каждый из которых соединен с соответствующим приводом постоянной скорости через регулирующий орган, подключенный через исполнительный механизм и блок управления к выходу минимизирующего блока, выполненного из реверсивного и вычитающего счетчиков, выходы которых связаны с логическим устройством, включенным на выходе
блока, из цифрового нуль-органа и удвоителя частоты, входы которого соединены с цифровым нуль-органом, выходом вычитающего счетчика и логическим устройством, а выход-с вычитающим счетчиком, первый вход цифрового нуль-органа подключен к датчику скорости привода, первый выход - к логическому устройству, а в л-м канале с минимальной скоростью изменения управляемого
параметра выходы цифрового нуль-органа связаны со счетными входами реверсивного счетчика, блок сопряжения, цифровой задатчик частоты, через блок соотношения соединенный с цифровыми нуль-органами, и блок
выбора режима, входы которого подключены к выходу цифрового задатчика скорости и выходу цифрового нуль-органа, а выходы - ко входам логических устройств, отличающаяся тем, что, с целью улучшения качества управления, система содержит блок задержек, выполненный из последовательно соединенных устройства задания коэффициентов, многоканального умножителя и многоканального преобразователя «код-временной интервал, и
в каждом канале, кроме п-го, соединенные последовательно переключающее устройство и устройство подавления совпадающих импуль,сав, выходы которого связаны со счетными входами реверсивного счетчика первые входы
переключающего устройства соединены с выходами цифрового нуль-органа, вторые входы через блок сопряжения - с выходами цифрового нуль-органа п-то канала, а управляющие входы - с выходом логического устройст&а, запускающий вход многоканального
умножителя блока задержек подключен к выходу блока выбора режима, другие входы - к выходам цифровых нуль-органов всех каналов, а выходы многоканального преобразователя «код-временной интервал соединены сЬ входами всех логических устройств, кроме п-го канала, цифровой нуль-орган в котором связан со входами всех логических устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сопряженными по нагрузке дозировочными агрегатами | 1974 |
|
SU637792A1 |
| ЧАСТОТНО-ИМПУЛЬСНОЕ УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ ДОЗИРОВОЧНОГО АГРЕГАТА | 1970 |
|
SU276209A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ НАСОСА-ДОЗАТОРА | 1973 |
|
SU399625A1 |
| Многоканальная система управления процессом приготовления смесей | 1974 |
|
SU732811A1 |
| Система для программного управления | 1989 |
|
SU1675847A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Устройство для программного управления | 1976 |
|
SU566241A1 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Устройство для регулирования расходажидКОСТи | 1979 |
|
SU842728A1 |
