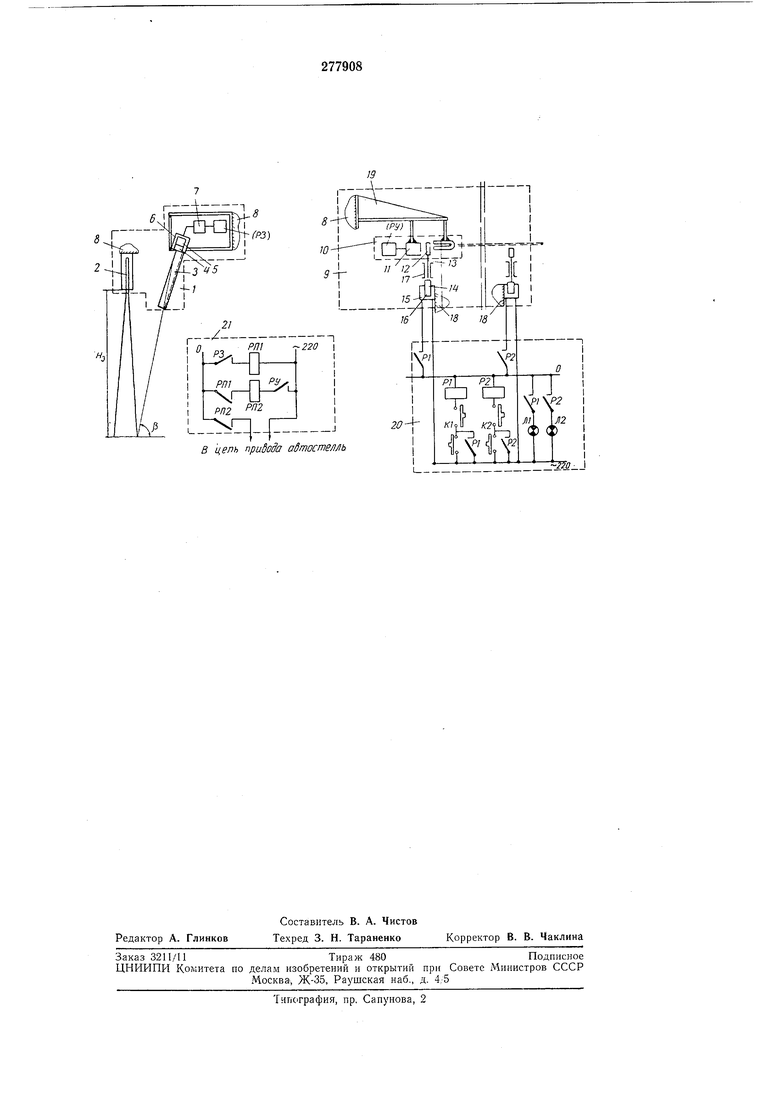
Предлагаемая система относится к области автоматизации производства на обогатительных фабриках нветной и черной металлургии, металлургических, коксохимических, цементных и других заводах. Известны устройства для загрузки бункеров, содержащие датчики и схему управления приводами исполнительного устройства. Недостатками известных устройств являются их сложность и ненадежность в работе. Предлагаемая система автоматизации загрузки бункеров автостеллой отличается тем, что она дополнительно содержит датчик загрузки бункеров, выполненный в виде гаммареле, блок выдачи команды, блок дистанционного зправления и блок программирования, выполненный в виде гамма-реле, поглощающих пластин и электромагнитов, кинематически связанных с пластинами, и обмотки которых подключены к блоку дистанционного управления, причем выходные контакты гаммареле датчика загрузки и блока программирования через блок выдачи команд включены в схему управления приводом автостеллы и ее транспортером. лой производится одним гамма-реле с пластинами, управляемыми магнитами. На чертеже представлена схема устройства. Предложенное устройство содержит: / - датчик загрузки; 2 - коллимированный оадиоактивный источник: 5 - коллиматор: 4- сцинтиллятор: 5 - фотоэлектронный умножитель: 6-футляр: 7 - электронный блок: 8- автостелла: 9 - блок программирования работы автостеллы: 10 - гамма-реле: 11 - приемник: 12 - пластины: 13 - тяги: 14 - сердечники: /5 -электромагниты; 16 - пружины; 17-напоавляющие: 18 - бункера: 19- кронштейн; 20 - блок дистанционного упсавлення: Р1 и Р2 - катУшки реле, Р1 и Р9 - контакты реле, /«d и /С - кнопки. Л1 и Л2 - сигнальные лампы: 21 - блок выдачи команд (БВК) в цепь привода автостеллы; РЗ - обмотка и контакты реле загрузки, РУ-обмотка и контакты реле управления, РП1 и РП2- промежуточное реле: Яз - заданный уровень загоузки бункеров, соответствующий углу |3°. Датчик загрузки / жестко крепят к автостелле 8, он перемещается вместе с автостеллой над бункеоами и обеспечивает контроль уровня загрузки всех бункеров. Источник 2 облучает руду в том бункере, над котооым находится в данный момент автостелла. Если уровень руды ниже нормы Яз, то отраженные от поверхности руды гамма-кванты не попадают в поле зрения коллиматора 3. При достижении рудой уровня Яз отраженные гамма-кванты регистрируются сцинтиллятором 4 и фотоэлектронным умножителем 5, сигнал проходит через электронный блок 7 и вызывает срабатывание реле РЗ. Гамма-реле 10 блока программирования работы автостеллы с номощью кронштейна 19 жестко связано с автостеллой 8, расположено сбоку бункеров 18 с таким расчетом, чтобы при движении автостеллы пластины 12 злектромагнитов 15 могли попадать в зазор между коллимированным источником 2 и приемником 11, вызывая срабатывание реле РУ. Блок дистанционного управления БДУ 20 служит для изменения состояния электромагнитов 15 (узла БП) с помощью кнопок К1, /(2,...,/С и сигнальных ламп Л/, Л2,...Л. В случае применения системы с вычислительным устройством для реализации программы загрузки бункеров, отвечающей, например, решению транспортной задачи линейного программирования, на автостелле устанавливают датчик, осуществляющий контроль направления ее движения с целью возможности получения команд на реверс автостеллы не только от концевых выключателей, расположенных у крайних бункеров, а в любой момент времени. В этом случае можно осуществить автоматический, бесконтактный опрос состояния электромагнитов для определения информации о том, возле какого именно бункера в данный момент работает автостелла. Работа блока выдачи команд БВК 21 поясняется с помощью таблицы. Возможны четыре сочетания контактов реле загрузки РЗ и реле управления РУ. Только в сочетании I автостелла осуществляет загрузку данного бункера, причем привод автостеллы выключен. После того как автостелла нагрузит некоторый участок данного бункера до уровня, отвечающего заданному (Яз), поступает сочетание И, в котором привод автостеллы включен, т. е. она перемещается. Переместивщись на некоторое расстояние, автостелла вновь остановится, поскольку уровень руды окажется ниже заданного, т. е. вновь наступило сочетание I. После ряда чередований сочетания I и сочетания П автостелла окажется в том положении, когда пластина 12 блока программирования БП 9 находится вне зазора между источником 2 и приемником // гамма-реле 10. Этому отвечает сочетание III, в котором автостелла движется к следующему по ходу бункеру. На пути движения к следующем-у бункеру она проходит над перегородкой. Это вызывает сочетание IV, в котором автостелла продолжит . Автостелла движения к следующей по ее ходу пластине 12, закрепленной за соответствующим бункером. При входе пластины 12 в зазор между источником 2 и приемником 11 поступает сочетание I, П и т. д. Отсюда следует: подбором длины пластин 12 можно регулировать режим работы автостеллы у данного бункера (секции); управляя работой гамма-реле 10 с помощью системы пластин 12, управляемых электромагнитами 15, можно изменять программу загрузки бункеров автостеллой: если, например, требуется, чтобы автостелла после загрузки первого бункера осуществила загрузку пятого бункера, то достаточно включить электромагниты, закрепленные за вторыми, третьими и четвертыми букерами. Подбор длины пластины 12 для задания режима работы автостеллы у соответствующих бункеров осуществляют однократно, на основании специально проводимых исследований, вскрывающих одновременно резерв свободных емкостей на данном предприятии, обеспечиваемый системой автоматизации. Предмет изобретения Система автоматизации загрузки бункеров автостеллой, содержащая датчики и схему управления приводом автостеллы и ее транспортером, отличающаяся тем, что, с целью повыщения надежности работы системы, она дополнительно содержит датчик загрузки бункеров, выполненный в виде гамма-реле, блок выдачи команд, блок дистанционного управления и блок программирования, выполненный в виде гамма-реле, поглощающих пластин и электромагнитов, кинематически связанных с пластинами, и обмотки которых подключены к блоку дистанционного управления, причем выходные контакты гамма-реле датчика загрузки и блока программирования чере блок выдачи команд включены в схему управления приводом автостеллы и ее транспортером. Ij в цель придода адтоствлль К2 г М 1 I .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления загрузкой вагонов | 1975 |
|
SU615022A1 |
| Устройство для управления и контроля загрузки бункеров автостеллой | 1973 |
|
SU478344A1 |
| Противоугонное устройство транспортного средства | 1987 |
|
SU1516399A2 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| Устройство для контроля и управления ленточным загрузочным механизмом | 1980 |
|
SU918208A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА РЕЖИМАМИ РАБОТЫ НАСОСНЫХ СТАНЦИЙ | 1967 |
|
SU205834A1 |
| МИКРОТВЕРДОМЕР С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1964 |
|
SU164695A1 |
| МОНЕТНЫЙ МЕХАНИЗМ | 1971 |
|
SU317087A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ | 1972 |
|
SU329484A1 |
| Способ автоматической загрузки бункеров измельчительного отделения обогатительной фабрики | 1990 |
|
SU1776555A1 |